 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Формирование цифрового сигнала в линии передачи
|
|
Линейный тракт ЦСП начинается с оборудования линейного тракта оконечной станции (см. раздел 1). На выход ОЛТ подается цифровой сигнал, сформированный так, чтобы его удобно было передать по линии. Рассмотрим соображения, которыми руководствуются при формировании такого сигнала.
Обязательным элементом ОЛТ является линейный трансформатор. Известно, что любой трансформатор не пропускает постоянный ток. Частотная характеристика трансформатора вносит бесконечно большое затухание на нулевой частоте и большое затухание на близких к ней частотах. В то же время однополярный двоичный сигнал ИКМ содержит постоянную составляющую. Более того, нулевая частота («постоянная составляющая») и близкие к ней частоты имеют самые большие амплитуды.
В качестве примера на рис. 2.1, а показан энергетический спектр G(f) случайной последовательности однополярных импульсов с постоянным (детерминированным) периодом ТТ и длительностью импульса ТИ. Видно, что этот спектр состоит из непрерывной Gн (f) и дискретной Gд (f) составляющих. При этом
 , (2.1)
, (2.1)
где сР— среднее значение импульсной последовательности,  — дисперсия случайных амплитуд импульсов передаваемого сигнала. Можно показать, что огибающие спектров GH и Gд пропорциональны SИ2(f), где SИ(f) — спектр одиночного импульса этой случайной последовательности.
— дисперсия случайных амплитуд импульсов передаваемого сигнала. Можно показать, что огибающие спектров GH и Gд пропорциональны SИ2(f), где SИ(f) — спектр одиночного импульса этой случайной последовательности.
 . (2.2)
. (2.2)
Здесь  - тактовая частота ЦСП;
- тактовая частота ЦСП;
 ,
,
где q=υTИ, υ — амплитуда прямоугольного импульса, ТИ — его длительность.
Спектр SИ(f), а поэтому и G(f), имеет вид затухающих лепестков, период которых по частоте равен 1/ ТТ. Непрерывная составляющая энергетического спектра — это составляющая со сплошным спектром (на рис.2.1, заштрихована).
Дискретная составляющая спектра — линейчатая, она состоит из отдельных частот: нулевой, основной частоты следования импульсов 1/ ТИ, а также гармоник этой частоты 2/ ТИ, 3/ ТИ и т. д. Амплитуда постоянной составляющей самая большая. Амплитуды частотных составляющих GH(f) и Gд(f) в низкочастотной части спектра выше, чем на других его участках. Поэтому такой сигнал, проходя через тракт с линейными трансформаторами, претерпевает большие искажения, так как частотная характеристика линейного трансформатора подавляет самые мощные составляющие его спектра. Это обстоятельство и вынудило преобразовать двоичный сигнал кодера ИКМ в цифровой сигнал, в котором постоянная составляющая и близкие к ней частоты отсутствуют (или почти отсутствуют). При этом уменьшаются и искажения, вносимые большим затуханием на низких частотах линейным трансформатором.
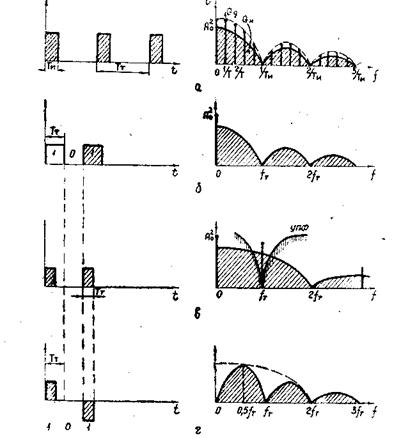
Рис. 2.1
Формирование цифрового сигнала с подавленными низкочастотными составляющими — основное назначение преобразователя кода (ПК). Как будет показано ниже, получить цифровой сигнал с такими свойствами удается за счет перехода от однополярного двухуровневого сигнала к двухполярному многоуровневому сигналу, обладающему избыточностью. Например, двоичный ИКМ сигнал, амплитудные значения которого условно изображают 0 или 1, преобразуется в троичный сигнал вида +1, 0, —1.
Оказалось, что подавление постоянной составляющей связано также с уменьшением мощности спектральных составляющих цифрового сигнала, которые расположены в районе тактовой частоты fТ. При этом уменьшается полоса частот цифрового сигнала, что позволяет уменьшить полосу пропускания входных цепей регенератора и, тем самым, мешающее действие помех. Значительное сокращение необходимой полосы частот цифрового сигнала возможно при использовании многоуровневых кодов. Сокращение полосы частот уменьшает действие помех, однако при этом увеличивается количество амплитудных градаций цифрового сигнала, что связано с ухудшением помехоустойчивости. Компромисс между этими двумя противоречивыми тенденциями определяет оптимальное количество уровней цифрового сигнала, которое, по расчетам, больше трех.
Избыточность кода цифрового сигнала в линии позволила использовать его для контроля исправности линейного тракта без перерывов связи. Возможность организации такого контроля стала важной характеристикой применяемого кода.
При построении регенераторов необслуживаемых регенеративных пунктов выяснилось, что характеристики цифрового сигнала в линии существенно влияют на работоспособность схем восстановления тактовых интервалов (ВТИ), а, значит, на параметры регенератора и линейного тракта в целом. Поэтому при построении перекодирующих устройств стали требовать от сформированного ПК линейного сигнала таких свойств, которые позволили бы выделить из него информацию о тактовых интервалах с высокой точностью, т. е. с малыми фазовыми дрожаниями.
Подводя итоги сказанному, сформулируем основные требования, которым должен удовлетворять цифровой сигнал в линии передачи:
— минимум энергии низкочастотных и высокочастотных составляющих энергетического спектра;
— возможность качественного выделения тактовых интервалов;
— возможность контроля качества линейного тракта без перерыва связи.
Рассмотрим, как влияют сформулированные выше требования на параметры импульсной последовательности передаваемого сигнала. Для этого вернемся к рис. 2.1. На этом рисунке слева приведены временные диаграммы, а справа — диаграммы энергетических спектров четырех вариантов импульсных последовательностей с детерминированным периодом ТТ, фиксированной длительностью импульса ТИ (разной для различных вариантов) и различной полярностью. В варианте а ТИ << ТТ: он подробно рассмотрен ранее. В варианте б ТИ = ТТ.
Напомним, что частоты дискретной составляющей спектра кратны 1 / ТИ , а их амплитуда определяется затухающей и осциллирующей огибающей, которая пропорциональна квадрату спектра одиночного импульса SИ(f). Нули огибающей идут на частотах к/ ТИ , где к =1, 2, 3,... Так как в варианте б ТИ = ТТ, то дискретные составляющие G(f), равные и кратные 1/ ТИ попадают в нули огибающей SИ2(f) и поэтому отсутствуют в энергетическом спектре. Нулевая частота («постоянная составляющая») попадает на максимум огибающей, поэтому ее амплитуда А0 ≠0. Более того, можно показать, что А0 для этого варианта максимальна.. Действительно, постоянная составляющая определяется средним значением сигнала за большой отрезок времени. Среднее значение импульсного сигнала зависит от длительности импульсов ТИ этого сигнала. В рассматриваемом варианте ТИ максимально, поэтому максимально и значение А0.
В соответствии с первым требованием к цифровому сигналу, необходимо, чтобы значение А0 было минимальным (А0 = 0). В соответствии со вторыми требованиями, желательно иметь в спектре G (f) дискретную составляющую с частотой fT. Колебание частоты f T (обозначим амплитуду этого колебания АТ) можно выделить узкополосным полосовым фильтром (УПФ) и сформировать из него периодическую последовательность импульсов тактовой частоты f T (т. е. выделить тактовые интервалы).
Как видно, сигнал варианта б ни первому, ни второму требованиям не удовлетворяет, так как А0 максимальна, а АТ =0. Уменьшение длительности импульсов ТИ < ТТ приводит к появлению дискретной составляющей частоты fT с амплитудой АТ (см. варианты а и в). Можно показать, что величина АТ максимальна при Т И = 0,5 ТТ. Поэтому второму требованию лучше удовлетворяет импульсная последовательность варианта в, у которой Т И = 0,5 ТТ. Однако и в этом случае А0=0, так как рассматривается только однополярный импульсный сигнал.
Применение биполярного сигнала (вариант г) позволяет уменьшить постоянную составляющую (говорят, сбалансировать постоянную составляющую) при использовании специальных кодов. Имеется большое количество балансных кодов, формирующих биполярный трехуровневый сигнал, у которых постоянная составляющая А0 ≈ 0. Одним из таких наиболее простых и чаще всего используемых кодов является код с чередованием полярностей импульсов (ЧПИ) (Alternation mark inversion signal, или, сокращенно, AMI). Цифровой сигнал в линии в этом случае является биполярным троичным (см. рис. 2.1,г и 2.2,б). Однако способ его построения не удовлетворяет правилам преобразования сигнала из двоичного в троичную систему счисления, и поэтому такой сигнал называют квазитроичным.
Алгоритм работы преобразователя кода приведен в табл. 2.1 и иллюстрируется временными диаграммами рис 2.2. Возможны две разновидности такого кодирования. Выходные сигналы ПК этих вариантов отличаются знаком и показаны в колонках табл. 2.1 «Выход 1» и «Выход 2».
Таблица 2.1
| Вход | Выход 1 | Выход 2 |
| 11 | +1 | -1 |
| 12 | -1 | +1 |
| 13 | +1 | -1 |
| 14 | -1 | +1 |
| … | … | … |
В первом столбце табл. 2.1 показаны элементы входного сигнала 0 и 1. Во всех вариантах кодирования нуль входного сигнала ПК остается нулем на выходе. А вот единица входного сигнала преобразуется по-разному, в зависимости от того, какой по счету во времени эта единица появилась на входе ПК. Первая единица (она обозначена 11) преобразуется на выходе в +1; вторая единица (она обозначена 12) преобразуется в —1 и т. д.
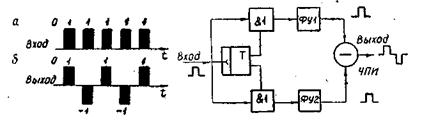
Рис. 2.2 Рис. 2.3
Иными словами, каждая нечетная единица входного сигнала не изменяет свой знак на выходе ПК, а каждая четная единица входного сигнала изменяет знак на выходе ПК.
Построить схему такого преобразователя можно различными способами. Один из них показан на рис. 2.3. Схема состоит из двух идентичных трактов, в каждом из которых последовательно включены схема совпадения на два входа и формирующее устройство (ФУ). ФУ представляет собой схему одновибратора (ждущего мультивибратора), который при поступлении единицы на его вход выдает один импульс заданной высоты и длительности ТИ.
Входной сигнал поступает на схемы совпадения как верхнего, так и нижнего трактов, а также на вход триггера Т со счетным входом. Триггер Т опрокидывается каждой единицей входного сигнала. В исходном состоянии триггер Т открывает схему совпадения верхнего тракта и пропускает первую единицу на формирующее устройство ФУ1 этого тракта. Первая единица входного сигнала, запустив ФУ1, опрокидывает триггер Т и тем самым открывает схему совпадения второго тракта. Поэтому вторая единица входного сигнала запустит формирующее устройство ФУ2 нижнего (второго) тракта и опрокинет триггер Т, открывая схему совпадения верхнего (первого) тракта, и т. д. Видно, таким образом, что единицы входного сигнала по очереди включают сигналы ФУ1 (нечетными единицами), а затем ФУ2 (четными единицами).
Формирующие устройства верхнего и нижнего трактов подсоединены к общему выходу через вычитающее устройство ВУ. Поэтому нечетные импульсы входного сигнала проходят на выход ПК со своим положительным знаком, а четные импульсы входного сигнала становятся на выходе ПК отрицательными. Так как начальное положение триггера со счетным входом не определено заранее, то процесс кодирования может происходить иначе, как это показано в колонке «Выход 2» табл. 2.1. Свойства сигнала при этом остаются прежними.
Можно показать, что энергетический спектр квазитроичного сигнала с ЧПИ, при условии, что символы двоичного входного сигнала ПК независимы и равновероятны, равен
 (2.3)
(2.3)
где G (f) - энергетический спектр входного однополярного двоичного сигнала (см. (2.1)). Графики G(f) и Gчпи (f) приведены справа на рис. 2.1, в и г соответственно. Так как множитель  равен нулю на частотах дискретной составляющей Gд(f), т. е. на частотах f = 0, fT, 2 fT, то соответствующие нули появляются и в спектре произведения GЧПИ(f). Учитывая это обстоятельство, а также то, что для двоичного сигнала с равновероятным появлением 0 и 1 дисперсия σС2 = 0,5, получаем:
равен нулю на частотах дискретной составляющей Gд(f), т. е. на частотах f = 0, fT, 2 fT, то соответствующие нули появляются и в спектре произведения GЧПИ(f). Учитывая это обстоятельство, а также то, что для двоичного сигнала с равновероятным появлением 0 и 1 дисперсия σС2 = 0,5, получаем:
 (2.4)
(2.4)
Видно, что в спектре цифрового сигнала, сформированного кодом ЧПИ, отсутствует постоянная составляющая. Отсутствие постоянной составляющей можно также увидеть непосредственно из временной диаграммы этого сигнала (см., например, рис. 2.2, б). Так как полярности токовых импульсов (единиц) чередуются, то среднее значение этого сигнала за большой отрезок времени («постоянная составляющая») равно нулю. Одновременно с подавлением постоянной составляющей уменьшается и ширина спектра цифрового сигнала.
 Строго говоря (см. рис. 2.1), ширина спектра цифрового сигнала любого из рассмотренных вариантов бесконечно большая. Однако передавать спектр такой ширины нет ни возможности, ни целесообразности. Дело в том, что более 90% всей энергии цифрового сигнала сосредоточено в первом лепестке его энергетического спектра. Поэтому с достаточной степенью точности ширину спектра цифрового сигнала ΔfИКМ можно определять шириной первого лепестка его энергетического спектра. Видно, что при ТИ =0,5 ТТ
Строго говоря (см. рис. 2.1), ширина спектра цифрового сигнала любого из рассмотренных вариантов бесконечно большая. Однако передавать спектр такой ширины нет ни возможности, ни целесообразности. Дело в том, что более 90% всей энергии цифрового сигнала сосредоточено в первом лепестке его энергетического спектра. Поэтому с достаточной степенью точности ширину спектра цифрового сигнала ΔfИКМ можно определять шириной первого лепестка его энергетического спектра. Видно, что при ТИ =0,5 ТТ
2 fТ, для однополярного двоичного сигнала,
Δ f ИКМ = (2.5)
fТ, для квазитроичного сигнала.
Именно этими соображениями и руководствуются, определяя ширину спектра ЦСП ΔfИКМ (1.1).
Вернемся к сравнению вариантов цифрового сигнала рис. 2.1. Видно, что первому основному требованию к цифровому сигналу, передаваемому по линии удовлетворяет только квазитроичный сигнал (см. рис. 2.1,г). К сожалению, в спектре этого сигнала, одновременно с подавленной постоянной составляющей, оказались подавлены и все дискретные составляющие, в том числе составляющая с частотой fТ, которая необходима для работы блока выделителя тактовых интервалов (ВТИ). Поэтому, в дальнейшем, во входных цепях блока ВТИ устанавливают двухполупериодный выпрямитель, который преобразует двухполярный сигнал ЧПИ в однополярный и формирует тем самым дискретную составляющую fТ, (см. рис. 2.1,в). Частота fТ, выделяется далее фильтром УПФ. Выпрямитель является, по существу, устройством обратного преобразования сигнала ЧПИ в двоичный ИКМ сигнал. Поэтому он используется в приемнике оконечной станции ЦСП как преобразователь кода приема.
Более детальный анализ влияния цифрового сигнала на работу блока ВТИ показал, что основные отклонения фазы сформированных тактовых импульсов возникают, если в сигнале имеется подряд большое количество нулей. В связи с этим появились многочисленные идеи создания модифицированных способов кодирования сигнала с ЧПИ (МЧПИ), в которых, по сравнению с описанным выше кодом ЧПИ, увеличивается плотность единиц в передаваемом сигнале. Поэтому такие коды стали называть кодами с высокой плотностью единиц — КВП (или НДБ). Из них наиболее широкое распространение получил код КВП-3.
Для всех кодов типа КВП заранее ограничивается количество нулей, которое может идти подряд в перекодированном сигнале на выходе ПК. В коде КВП-3 допустимо подряд не более трех нулей. Алгоритм кодирования приведен в табл. 2.2, а на рис. 2.4 — пример такого кодирования (а — символы, б — импульсы сигнала на входе ПК, в — сигнал на выходе ПК кодом КВП-3).
Таблица 2.2
| Сигнал ИКМ | Код КВП-3 | Условие выбора варианта | |
| +1 | В соответствии с кодом ЧПИ | ||
| -1 | |||
| То же | |||
| 000 V | n1=1, 3, 5…. | См. также табл. 2.3 | |
| W 00 V | n1=0, 4, 2… |
W — импульс, полярность которого противоположна полярности предыдущего импульса; V — импульс, полярность которого повторяет полярность предыдущего импульса; n1 — количество единиц между данным и предшествующим нарушением биполярности.
Кодирование единиц в коде КВП-3 осуществляется так же, как и в коде ЧПИ. Нули, если их количество меньше или равно 3, кодируются таким же количеством нулей, как и в коде ЧПИ.
При появлении четырех нулей подряд соответствующая кодовая комбинация бестоковых импульсов заменяется на комбинацию с токовыми импульсами W и V. При этом нарушается биполярность и, если не предпринимать никаких мер, то среднее значение сигнала возрастает, т. е. появится постоянная составляющая. Чтобы не допустить появления постоянной составляющей, замена бестоковой комбинации из четырех нулей комбинацией, содержащей токовые импульсы, происходит каждый раз по-разному, но всегда так, чтобы полярность добавляемых импульсов W и V на одном интервале нарушения биполярности (ИНБ) отличалась от полярности импульсов на другом. На временной диаграмме рис. 2.4 эти ИНБ отмечены фигурными скобками. Такое чередование полярностей импульсов на ИНБ позволяет скомпенсировать увеличение среднего значения сигнала, которое произошло в (к+1)-е нарушение биполярности.
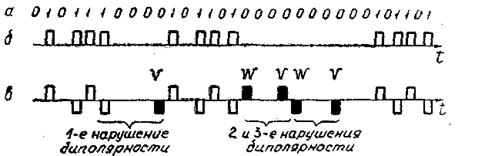
Рис. 2.4
Для того, чтобы полярность импульсов на соседних интервалах нарушения биполярности изменилась, необходимо, чтобы между двумя соседними импульсами V находилось нечетное количество единиц n1 с ЧПИ. Так, в примере рис. 2.4 на первом интервале нарушения биполярности комбинация 0000 заменяется комбинацией 000V
. На втором и третьем ИНБ комбинация 0000 заменяется на W00V. Использование импульса W позволяет сохранить нечетное количество единиц n1 (включая W) между двумя соседними импульсами V и осуществить тем самым инверсию импульсов на соседних интервалах нарушения биполярности. Сказанное можно записать в виде алгоритма замены кодовой комбинации из четырех нулей на комбинацию, в которой количество нулей не более трех: на первом ИНБ замена может быть любой — 000V либо W00V; на всех последующих ИНБ, если n1 = 1, 3, 5,..., то 000V; если n1 = 0, 2, 4,..., то W00V.
Другой способ пояснения алгоритма замены 0000 на 000V или W00V приведен в табл. 2.3.
Таблица 2.3
| + | - | -00- | W00V |
| - | - | +00+ | |
| + | - | 000- | 000V |
| - | + | 000+ |
В колонках 1, 2 и 3 показаны соответственно: 1 – полярность импульса V на k -м ИНБ; 2 – полярность импульса, предшествующего (k+1)- й комбинации 0000; 3 – последовательность импульсов, которая заменяет (k+1)- ю комбинации 0000 в коде КВП-3.
В кодах ЧПИ и КВП-3 легко осуществляется контроль за качеством передачи цифрового сигнала (т. е. за качеством линейного тракта): в ЧПИ — по нарушению биполярности, в КВП — по нарушению алгоритма нарушения биполярности.
Рассмотренные троичные коды не изменяют тактовой частоты цифрового сигнала. Это означает, что длительность тактового интервала цифрового сигнала на входе ПК остается неизменной.
Изменение тактовой частоты преобразователем кода можно осуществить при блочном кодировании. В этом случае m -разрядным кодовым группам входного двоичного сигнала однозначно сопоставляются n -разрядные, в общем случае lу -уровневые кодовые комбинации. Сокращенно это записывают, например, так: код 6В —3T. Такая запись означает, что 6-разрядные (m = 6) двоичные (В — Binary) кодовые комбинации при кодирований преобразуются в трехразрядные (n = 3) троичные (Т — Тегnегу) кодовые комбинации. Скажем, код типа ЧПИ в этой символике запишется как код 1 В —1 Т, так как при кодировании ЧПИ одноразрядные двоичные символы преобразуются в одноразрядные троичные.
Для изменения тактовой частоты, необходимо, чтобы т ≠ п. Если т > п, то тактовая частота цифрового сигнала в линии уменьшается и равна f ТЛ = n/mf T, где fT — тактовая частота цифрового сигнала на входе ПК.
Для того, чтобы при меньшем числе разрядов п перекодированного цифрового сигнала в линии можно было описать 2т возможных комбинаций кодируемых групп двоичного сигнала, число уровней ly в сигнале на выходе ПК должно удовлетворять неравенству lyn > 2m, т. е. log2 ly > m/ п. Значение lу, близкое к оптимальному по критерию эффективности ЦСП, приблизительно равно 5.
Сформированный ПК оконечной станции цифровой сигнал передается через тракт передачи ОЛТ по физической цепи. Важной особенностью ЦСП является возможность регенерации цифрового сигнала, искаженного средой распространения (физической цепью). Такая регенерация осуществляется на всех промежуточных станциях НРП и ОРП, а также в ОЛТ приемника оконечной станции.
Дата публикования: 2014-11-02; Прочитано: 1690 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
