 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
А) Расчет потоков рассеяния и индуктивности катушки без учета сопротивления стали. 3 страница
|
|

 б б)
б б)
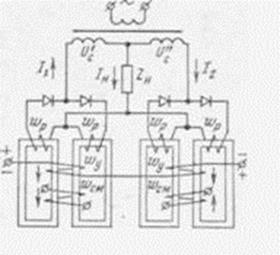
Рис. 14. Дифференциальные схемы реверсивных магнитных усилителей с выходом переменного тока:
а) без обратной связи; б) с самонасыщением
Аналогично работает схема с самонасыщением (рис.14,б), выгодно отличающаяся от предыдущей на один-два порядка большим коэффициентом усиления. Выпрямляя токи I1 и I2 мостовыми выпрямителями, можно получить схемы с комбинированной (внешней и внутренней) обратной связью, релейный режим и т.п.
Оперируя с основными гармониками токов и напряжений, можно для выходных токов усилителей записать выражения:
I1=  и I2=
и I2= 
Где İн =İ1 -İ2 – ток нагрузки; Rн +j𝝎Lн =Zн – сопротивление нагрузки;
L1 и L2 – индуктивности рабочих обмоток усилителей (активными сопротивлениями этих обмоток пренебрегаем).
Из предыдущего выражения, действующее значение основной гармоники тока нагрузки:
Iн= 
Сдвиг фаз между током Iн и напряжением Uc вторичных обмоток трансформатора определяется выражением:
tgφ=  .
.
В идеальном случае при полном размагничивании одного усилителя (когда Нсм -Ну =0) его индуктивность L1 →бесконечности, а индуктивность другого усилителя L2 →0 и к нагрузке будет приложено все напряжение Uc. В реальных усилителях всегда Uн max <Uc.
2) Мостовая схема – рабочие обмотки одного 𝝎1а и 𝝎1б и рабочие обмотки другого 𝝎2а и 𝝎2б нереверсивного усилителя (рис.15,а) образуют четыре плеча моста, в одну диагональ которого включают нагрузку, а к другой подводят напряжение (рис.15,б). Цепи управления и смещения (не показанные на рисунке) осуществлены так же, как в дифференциальной схеме. При отсутствии тока управления индуктивности всех обмоток 𝝎р одинаковы,мост уравновешен и ток в нагрузке равен нулю. При подаче тока управления индуктивность уменьшается у той пары рабочих, в сердечниках которой напряженности смещения и управления складываются, и увеличивается у двух других обмоток 𝝎р. Так как рабочие обмотки одного нереверсивного усилителя находятся в противоположных плечах моста, мост выходит из равновесия и по нагрузке идет ток, фаза которого меняется на 1800 при изменении полярности тока управления


Рис.15. Мостовая схема реверсивного магнитного усилителя с выходом переменного тока без обратной связи:
а) сердечники с обмотками; б) схема соединений рабочих обмоток (стрелки означают переходные э.д.с., повышающие инерционность, снизить которую можно поменяв начала и концы 𝝎1 или 𝝎2)
Мостовая схема реверсивного усилителя может быть выполнена и на усилителях с самонасыщением (рис. 16):

А и Б
Рис. 16. Мостовая схема реверсивного усилителя с выходом переменного тока с самонасыщением:
а) сердечники с обмотками; б) схема соединение рабочих обмоток
3) Трансформаторная схемареверсивного усилителя также состоит из двух нереверсивных усилителей (рис. 17.). Трансформаторные усилители помимо обычных рабочих обмоток, роль которых выполняют первичные обмотки 𝝎р1, имеют вторичные обмотки 𝝎р2, э.д.с. которых связана с напряжением, приложенным к первичным рабочим обмоткам, коэффициентом трансформации. В реверсивной схеме обмотки 𝝎р1 обоих усилителей включены последовательно с источником питания. Включенные встречно вторичные обмотки замкнуты на сопротивление нагрузки. Обмотки управления и смещения усилителей включены, как в двух предыдущих схемах (см. рис.14).

Рис. 17. Трансформаторная схема реверсивного усилителя с выходом переменного тока
При отсутствии тока управления сердечники обоих усилителей подмагничены обмотками смещения в одинаковой степени, индуктивности всех обмоток 𝝎р1 одинаковы и напряжение источника питания поровну делится между двумя усилителями. Вторичные э.д.с. равны, и их разность, приложенная к нагрузке, равна нулю.
При подаче тока в обмотки управления уменьшается индуктивность той пары обмоток 𝝎р1, в сердечниках которой напряженности управления и смещения складываются; индуктивность другой пары обмоток увеличивается. Напряжение U1 перераспределяется соответственно сопротивлениям первичных обмоток, вместе с ним изменяются вторичные напряжения. На нагрузке появляется разность вторичных напряжений, которая изменяет фазу на 180° при изменении полярности управляющего сигнала.
Путем соответствующего выбора коэффициента трансформации можно получить любую величину напряжения на нагрузке, независимо от напряжения источника питания. Таким образом, схема рис 17 совмещает функции усилителя и трансформатора.
Характеристики всех трех схем практически совпадают, если усилители выполнены на одних и тех же сердечниках, работающих в одинаковом режиме. Однако каждая схема имеет свои особенности, определяющие область ее применения.
Из схем без обратной связи (как внешней, так и внутренней, т. е. без самонасыщения) наиболее проста мостовая схема, не имеющая трансформатора (как дифференциальная схема) B обладающая меньшими потерями в обмотках по сравнению с трансформаторной схемой. Последнее объясняется тем, что в трансформаторной схеме максимальный ток нагрузки идет по всем четырем вторичным обмоткам, а с учетом коэффициента трансформации и по всем четырем первичным. В мостовой же схеме этот ток проходит по двум обмоткам из четырех, расположенных в противоположных плечах моста. Однако мостовую схему можно применять только в том случае, если максимальное напряжение на нагрузке не превышает 65—75% напряжения источника питания, так как достигнуть идеального случая, Uн max =Uc, нельзя.
Трансформаторную схему удобно применять тогда, когда максимальное напряжение на нагрузке должно быть выше или намного ниже напряжения источника питания.
Из схем с самонасыщением наиболее проста дифференциальная схема, благодаря чему она нашла широкое применение. Питающий ее трансформатор со средней точкой обычно объединяется с общим силовым трансформатором, питающим предыдущий каскад усилителя, цепи смещения и т. п [4].
6.8 Бесконтактные магнитные реле на основе МУС
Работа реле характеризуется скачкообразным изменением тока в рабочей цепи при подаче управляющего сигнала определенного значения.
Такой режим работы может быть реализован в магнитных усилителях путем так называемой положительной обратной связи с выхода усилителя на его вход.
Обратная связь осуществляется в магнитных усилителях последовательным включением в цепь нагрузки специальной обмотки обратной связи ООС (рис. 5.11, а), которая, так же, как и обмотка управления ОУ, охватывает оба сердечника. Обратная связь называется положительной, если она действует согласно с управляющим сигналом, т.е. подмагничивание сердечников усилителя осуществляется двумя обмотками – управления и обратной связи. Обмотка обратной связи как бы помогает обмотке управления подмагничивать сердечники, вследствие чего от обмотки управления требуется меньшая МДС.
Если число витков обмотки ООС выбрать достаточно большим, то эта обмотка одна обеспечит подмагничивание сердечников даже при отсутствии тока в обмотке управления. Для размагничивания сердечников приходится подавать в обмотку управления отрицательный ток, достаточный для компенсации положительной МДС обмотки ООС.

Рисунок 18. Магнитный усилитель с положительной обратной связью
а) – Схема МУс; б) – характеристики МУС
Построение характеристики магнитного усилителя для данного случая показано на рис. 18, б, где характеристика магнитного усилителя без обратной связи представлена кривой 1, а кривая 2 – характеристика обратной связи – изображает зависимость между током нагрузки Iн и МДС обмотки обратной связи, выраженную уравнением
Fо.с = Iнvо.с,
где Fo.c – МДС обмотки обратной связи; vо.с – число витков обмотки обратной связи.
Как видно из рис 18, обмотка ООС при всех токах нагрузки создает МДС, большую, чем требуется согласно кривой 1.
Следовательно, обмотка ОУ должна создавать МДС Fy, компенсирующую избыток МДС обмотки ООС согласно равенству
Fy = Fрез - Fo.c ,
где Fрез – результирующая МДС, определяемая по кривой 1.
В соответствии с равенством на рис. 18, б построена характеристика магнитного усилителя 3, представляющая собой зависимость тока выхода от тока управления усилителя с сильной положительной обратной связью. Как видно из рисунка, построенная характеристика управления имеет участок АВ с отрицательным наклоном. Устойчивая работа усилителя на этом участке невозможна. При малейшем случайном изменении тока нагрузки, например при его возрастании, увеличивается МДС обмотки ООС, что вызывает дальнейшее увеличение тока, и так далее до тех пор, пока усилитель не выйдет на верхнюю (или нижнюю) пологие ветви характеристики 3.
Значит, устойчивая работа усилителя возможна лишь на этих пологих ветвях, причем переход с одной ветви на другую происходит следующим образом. При отсутствии тока управления ток нагрузки максимален, что видно из рис. 18, б. При плавном увеличении отрицательного тока управления до значения, соответствующего МДС Fотп (точка В ), происходит скачкообразное уменьшение тока нагрузки до значения I0, т.е. переход в точку С. При обратном изменении МДС управления до значения Fcp (точка А ) происходит скачок тока в точку D. Следовательно, поведение магнитного усилителя напоминает работу реле, причем здесь также наблюдается разница в значениях МДС срабатывания и отпускания.
Как видно из рис. 18, б, эта разница зависит от наклона участка АВ, т.е. от степени влияния обмотки обратной связи. Чем сильнее обратная связь, тем больше наклон и больше разница в МДС срабатывания и отпускания. На вид релейных характеристик также влияет и постоянное смещение, создаваемое МДС Fcм специальной обмотки смещения. Эта МДС смещает характеристику реле вдоль оси абсцисс, причем направление смещения зависит от полярности тока смещения. В результате могут быть получены характеристики реле с различными свойствами. На рис. 19 изображены три вида характеристик и соответствующие им эквиваленты контактных реле. Характеристика на рис. 19, а соответствует реле с замыкающим контактом, на рис. 19, б — реле с размыкающим контактом. Коэффициент возврата этих реле kв = Fcp/Fотп. Характеристике на рис. 19, в соответствует реле с блокировкой, так как при снятии управляющего сигнала реле остается во включенном состоянии (точка А на рис. 19, в).
Магнитные усилители, работающие в релейном режиме, используются в автоматике для бесконтактной коммутации электрических цепей. Отсутствие контактов повышает надежность релейного элемента, особенно при большой частоте включений.

Рисунок 19. Характеристики контактного реле и его контактные эквиваленты
а) – реле с замыкающим контактом; б) – реле с размыкающим контактом; в) – реле с блокировкой.
Недостатком таких схем является наличие тока I0 в цепи в выключенном состоянии. Хотя этот ток и невелик, однако иногда он нежелателен и даже недопустим. Минимальная мощность срабатывания бесконтактных реле на основе магнитных усилителей (БМР) достигает 10-10В.
Отсутствие контактов и подвижных частей делает БМР исключительно надежными, износостойкими, вибро- и ударостойкими, пригодными для работы во взрывоопасных средах. В то же время БМР обладают и рядом недостатков:
1) При прямоугольной форме управляющего напряжения постоянная составляющая магнитного потока нарастает с постоянной времени цепи управления Ty. При этом происходит замедление времени срабатывания, обусловленное электромагнитным процессом в обмотке управления.
2) Параметры БМР зависят от напряжения и частоты питания, а также от температуры окружающей среды, что требует специальных мер по температурной стабилизации.
3) В положении, соответствующем U=0, нагрузка остается электрически связанной с источником питания рабочих обмоток.
4) Схемы БМР, особенно при большом числе управляемых цепей, бывают сложными и громоздкими.
5) КПД рабочей цепи БМР значительно ниже, чем у контактных коммутирующих аппаратов.
6) При большой мощности нагрузки масса и габариты БМР значительно больше, чем у контактных коммутирующих аппаратов той же мощности.
Как правило, в сложных электрических аппаратах большие токи коммутируются контактными или полупроводниковыми устройствами и только входные элементы таких аппаратов могут выполняться на МУ [5].
6.9. Материалы магнитопроводов магнитных усилителей
Для изготовления магнитопрозодов МУ используются электротехнические стали (сплавы железа и кремния) и пермаллои (сплавы железа, никеля и других металлов). Чем выше индукция насыщения ВS материала магнитопровода, тем больше мощность МУ. В усилителях малой мощности целесообразно применять сплавы 79НМ, 79НМА, 80НХС, 74НМД, 76НХД с небольшой индукцией насыщения, но позволяющие получить высокий коэффициент усиления. Эти сплавы имеют высокую стоимость.

Рис. 20. Магнитопроводы магнитных усилителей:
а —Ш-образный; б — П-образный с косым стыком между пластинами; в — тороидальный; г —ленточный витой, разрезной
При больших мощностях целесообразно применять более дешевые холоднокатаные стали с высокой индукцией насыщения. К магнитопроводам МУ предъявляются требования максимального использования магнитных свойств материала, возможности изготовления МУ минимальных габаритов и массы, технологичности изготовления как самих магнитопроводов, так и обмоток. С точки зрения использования магнитного материала необходимо отсутствие воздушных зазоров в магнитной цепи. Даже очень малые воздушные зазоры резко ухудшают характеристики МУ, так как МДС, необходимая для проведения потока управления через воздушный зазор, может быть соизмерима с МДС, затрачиваемой на создание поля управления. При этом ухудшаются коэффициенты усиления, чувствительность и Другие параметры.

Рис. 21. Расположение обмоток на магнитопроводе:
а— Ш-образный с отдельной wy; б —с общей обмоткой wy; в — П-образный с отдельной wy, г — с общей обмоткой wy д — тороидальный с отдельной, е -
с общей обмоткой wy.
Оптимальным является магнитопровод тороидальной формы, набранный из кольцеобразных штампованных пластин или намотанный из тонкой ленты. Применяемые для МУ магпитопроводы показаны на рис. 20. Для МУ малой мощности и с высоким коэффициентом усиления применяется ленточный магнитопровод (рис. 20, в), при больших мощностях — магнитопроводы по рис. 20, а, б и г. В зависимости от схемы МУ и типа магнитопровода меняется место расположения обмоток (рис. 21). Рабочая обмотка wp и обмотка управления доу располагаются на среднем стержне (рис. 21, а). Общая обмотка управления располагается, как показано на рис. 21, б. Применение общей обмотки wy позволяет снизить габариты МУ и уменьшить сопротивление цепи управления. Следует отметить, что при общей обмотке управления ухудшаются условия теплоотдачи. При этом также усложняется технология изготовления.
КОНТРОЛЛЕРЫ, КОМАНДОАППАРАТЫ И РЕОСТАТЫ
7.1. Общие сведения
Контроллером называется электрический аппарат с ручным управлением, предназначенный для изменения схемы подключения электродвигателя к электропитанию. По конструктивному исполнению контроллеры делятся на барабанные, кулачковые и плоские.
Командоаппаратом называется устройство, предназначенное для переключений в цепях управления силовых электрических аппаратов (контакторов). Иногда они применяются для непосредственного пуска электродвигателей малой мощности, включения электромагнитов и другого электрооборудования. Командоаппараты могут иметь ручной привод (кнопки, ключи управления, командоконтроллеры) или приводиться в действие контролируемым механизмом (путевые выключатели).
Реостат является совокупностью резисторов и контроллера, позволяющей изменять вводимое в цепь сопротивление.
7.2. Контроллеры
а) Барабанные контроллеры. На рис. 7.1 показан контактный элемент барабанного контроллера. На валу 1 укреплен сегментодержатель 2 с подвижным контактом в виде сегмента 3 Сегментодержатель изолирован от вала изоляцией 4 Неподвижный контакт 5 расположен на изолированной рейке 6. При вращении 1 сегмент 3 набегает на неподвижный контакт 5, чем осуществляется замыкание цепи. Необходимое контактное нажатие обеспечивается пружиной 7. На одном валу устанавливается ряд таких контактных элементов. Сегментодержатели соседних контактных элементов можно соединять между собой в различных необходимых комбинациях. Определенная последовательности замыкания различных контактных элементов обеспечивается различной длиной их сегментов. Схема соединений сегментодержателей для пуска асинхронного двигателя с фазным ротором показана на рис. 7.1, б. Неподвижные контакты контроллера обозначены С1, Л1, С3, Л3, жирными горизонтальными линиями обозначены подвижные контакты-сегменты, косыми линиями — перемычки между сегментами. В положении «Вперед» обмотка статора подключается к напряжению сети, а резисторы в цепях обмотки ротора включены полностью. По мере вращения барабана эти резисторы выводятся из цепи обмотки ротора.


Рис. 7.1. Контактный элемент барабанного контроллера (а): схема соединения для пуска асинхронного двигателя с фазным ротором (б)
Вследствие малой износостойкости контактов допустимое число включений контроллера в час не превышает 240. При этом мощность запускаемого двигателя приходится снижать до 60 % номинальной, из-за чего такие контроллеры применяются при редких включениях.
б) Кулачковые контроллеры. В кулачковом контроллере переменного тока (рис. 7.2) перекатывающийся подвижный контакт 1 имеет возможность вращаться относительно центра расположенного на контактном рычаге 2. Контактный рычаг 2 поворачивается относительно центра  . Контакт 1 замыкается с неподвижным контактом 3 и соединяется с выходным контактом с помощью гибкой связи 4. Замыкание контактов 1, 3 и необходимое контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 8 на контактный рычаг. При этом сжимается пружина 5 и контакты. 1, 3 размыкаются. Момент включения и отключения контактов зависит от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ-60 %. В контроллер входят два комплекта контактных элементов 1 и 11, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко сократить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала. Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В них устанавливаются только дугостойкие асбестоцементные перегородки 10. Контроллеры постоянного тока имеют дугогасительное устройство, аналогичное применяемому в контакторах.
. Контакт 1 замыкается с неподвижным контактом 3 и соединяется с выходным контактом с помощью гибкой связи 4. Замыкание контактов 1, 3 и необходимое контактное нажатие создаются пружиной 5, воздействующей на контактный рычаг через шток 6. При размыкании контактов кулачок 7 действует через ролик 8 на контактный рычаг. При этом сжимается пружина 5 и контакты. 1, 3 размыкаются. Момент включения и отключения контактов зависит от профиля кулачковой шайбы 9, приводящей в действие контактные элементы. Малый износ контактов позволяет увеличить число включений в час до 600 при ПВ-60 %. В контроллер входят два комплекта контактных элементов 1 и 11, расположенных по обе стороны кулачковой шайбы 9, что позволяет резко сократить осевую длину устройства. Как в барабанном, так и в кулачковом контроллере имеется механизм для фиксации положения вала. Контроллеры переменного тока в виду облегченного гашения дуги могут не иметь дугогасительных устройств. В них устанавливаются только дугостойкие асбестоцементные перегородки 10. Контроллеры постоянного тока имеют дугогасительное устройство, аналогичное применяемому в контакторах.
Выключение рассмотренного контроллера происходит при воздействии на рукоятку и передаче этого воздействия через кулачковую шайбу, включение происходит с помощью силы пружины 5 при соответствующем положении рукоятки. Поэтому контакты удается развести даже в случае их сваривания. Недостаток конструкции заключается в большом моменте на валу за счет включающих пружин при значительном числе контактных элементов. Надо отметить, что возможны и другие конструктивные решения привода контактов контроллера.

Рис. 7.2. Кулачковый контроллер

Рис. 7.3. Схема соединений кулачкового контроллера для пуска асинхронного двигателя с фазным ротором
На рис. 7.3 показана схема для пуска асинхронного двигателя с фазным ротором с помощью кулачкового контроллера. Контакты обозначены римскими цифрами, позиции вала аппарата — арабскими. При пуске «Вперед» работают контактные элементы, расположенные справа. Например, в третьей позиции замкнуты контакты I—IV. При этом статор подключен к сети, а в цепи ротора выведены первые ступени пусковых резисторов в двух фазах. В положении 5 все контакты замкнуты и ротор двигателя закорочен.
в) Плоские контроллеры. При большом числе контактов габариты и масса кулачковых и барабанных контроллеров резко возрастают. В этом случае, если число операций в час при регулировании и пуске невелико (10—12), применяются плоские контроллеры. В плоском контроллере на плите из изоляционного материала располагаются неподвижные контакты, по которым скользит подвижный контакт мостикового типа, одновременно соприкасающийся с токосъемной шиной. Такой контроллер показан на рис. 7.19, где по неподвижным цилиндрическим контактам 0 — 13 и шинам 14, 15 скользит подвижный контакт 16 мостикового типа.
7.3. Командоаппараты
а)Кнопки управления. Простейшим командоаппаратом является кнопка управления. Кнопка используется для схем пуска, остановки и реверса электродвигателей путем замыкания и размыкания обмоток контакторов, которые коммутируют главную цепь, а также для управления самыми различными схемами автоматики. Один из вариантов конструктивного выполнения кнопки управления показан на рис. 7.4. Для повышения надежности контакты часто выполняются из серебра. При переменном токе электрическая дуга надежно гаснет при напряжении до 500 В и токе 3 А благодаря двум размыкающим контактам для одной коммутируемой цепи. При постоянном токе и напряжении 440 В отключаемый ток не превышает 0,15 А. При использовании кнопки для включения электромагнитов переменного тока (например, контакторов) ее контакты в замкнутом положении должны надежно пропускать пусковые токи обмоток, которые могут достигать 60 А. Следует отметить, что схемы управления целесообразно проектировать так, чтобы непосредственное отключение цепи производилось не кнопкой, а другим, более мощным аппаратом, имеющим вспомогательные контакты. В том случае, когда необходимо производить переключение нескольких цепей
по определенной программе с большой частотой включений, применяются командоконтроллеры.
б ) Командоконтроллеры. Широкое распространение получили нерегулируемые кулачковые командоконтроллеры. На рис. 7.5 показан нерегулируемый командоконтроллер постоянного тока, по принципу устройства аналогичный кулачковому контроллеру. С помощью мостикового контакта 1 в отключаемой цепи создаются два разрыва, что облегчает гашение дуги. Кулачковый привод, большое расстояние контактов от центра вращения О рычага 2, большой междуконтактный промежуток позволяют получить высокую скорость расхождения контактов и увеличить ток отключения почти в 4 раза по сравнению с током отключения кнопочного элемента. Моменты замыкания и размыкания контактов зависят от профиля кулачка 3. Положение вала фиксируется с помощью рычажного фиксатора 4. С помощью командоконтроллера производится управление силовыми контакторами, которыми в свою очередь коммутируются силовые цепи.

Рис. 7.4. Кнопка управления


Рис. 7 5. Нерегулируемый кулачковый командоконтроллер
При необходимости точной регулировки момента срабатывания применяются регулируемые кулачковые командоконтроллеры. Устройство одного элемента такого контроллера показано на рис. 7.6, а. На валу 1 укрепляется диск 3 из изоляционного материала. По окружности диска расположены отверстия для крепления кулачков 2 и 7.

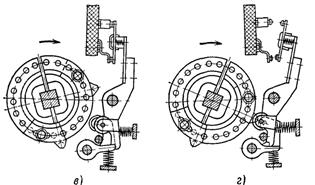
Рис 7.6 Регулируемый кулачковый командоконтроллер
При нажиме кулачка 7 на ролик 9 контактный рычаг 8 поворачивается относительно центра 0 против часовой стрелки и неподвижные контакты 4 и 5 замыкаются мостиком б Контактный рычаг фиксируется во включенном положении защелкой 12, которая удерживается пружиной 13 в пазу нижней части рычага 5 (рис 7.6, б). Одновременно сжимается возвратная пружина 10

Рис. 7.7. Путевой микропереключатель
Рис. 7.8. Рычажный путевой переключатель
При дальнейшем вращении диска кулачок 2 набегает на ролик 11 защелки 12 и выбивает последнюю Под действием пружины 10 происходит размыкание контактов (рис 7.6, г) Достоинством механизма является независимость скорости размыкания контактов от частоты вращения вала. Это дает возможность использовать регулируемый командоконтроллер в качестве путевого выключателя с малой частотой вращения вала.
Момент замыкания и размыкания контактов может регулироваться в широких пределах с большой точностью. При грубой регулировке кулачок устанавливается в различные положения на диске (точность установки 18°). Для точной регулировки предусмотрена овальная форма отверстия для крепления кулачка, что позволяет смещать его на ±10°  30' относительно центра отверстия.
30' относительно центра отверстия.
В регулируемом командоконтроллере можно установить на каждом диске до трех включающих и трех выключающих кулачков. Число коммутируемых цепей может меняться от 4 до 12, что позволяет использовать командоконтроллер для управления сложными схемами автоматики. Вращение вала командоконтроллера осуществляется специальным исполнительным двигателем, что обеспечивает дистанционное управление им.
в) Путевые (позиционные) выключатели (переключатели) и микровыключатели. Путевой выключатель предназначен для замыкания или размыкания слаботочных сигнальных цепей в зависимости от пространственного положения (позиции) рабочего органа управляемого электропривода. Частным случаем путевых являются конечные (концевые) выключатели, обеспечивающие коммутацию сигнальных цепей только в крайних положениях хода рабочего органа. Контактные путевые выключатели можно подразделить на кнопочные и рычажные. В кнопочном путевом выключателе контролируемый рабочий орган воздействует на шток кнопочного элемента (см рис. 7.4).
Размыкание и замыкание контактов происходит со скоростью перемещения контролируемого органа. При скорости штока меньше 0,4 м/мин необходимо применять выключатели с повышенным быстродействием, обеспечивающие необходимую скорость размыкания контактов.
Если требуется остановить рабочий орган привода или при его приближении выполнить соответствующие переключения с высокой точностью (0,3  ,7)
,7)  м, применяются путевые (конечные) микропереключатели. На рис. 7.7 показан микропереключатель с одним переключающим контактом. Неподвижные контакты 1 и 2 укреплены в пластмассовом корпусе 7. Подвижный контакт 3 укреплен на конце специальной пружины, состоящей из плоской 4 и фигурной 5 частей. В изображенном на рис. 7.7 положении пружина создает давление на контакт 2. При нажатии рабочего органа на головку 6 происходят деформация пружины и переброс контакта 3 в нижнее положение за время 0,01—0,02 с, что обеспечивает надежное отключение цепи. Ход головки 6 составляет десятые доли миллиметра. Микровыключатели ВМК-ВЗГ, например, отключают ток 2,5 А при постоянном напряжении 220 и переменном 380 В.
м, применяются путевые (конечные) микропереключатели. На рис. 7.7 показан микропереключатель с одним переключающим контактом. Неподвижные контакты 1 и 2 укреплены в пластмассовом корпусе 7. Подвижный контакт 3 укреплен на конце специальной пружины, состоящей из плоской 4 и фигурной 5 частей. В изображенном на рис. 7.7 положении пружина создает давление на контакт 2. При нажатии рабочего органа на головку 6 происходят деформация пружины и переброс контакта 3 в нижнее положение за время 0,01—0,02 с, что обеспечивает надежное отключение цепи. Ход головки 6 составляет десятые доли миллиметра. Микровыключатели ВМК-ВЗГ, например, отключают ток 2,5 А при постоянном напряжении 220 и переменном 380 В.
При больших ходах рабочего органа и больших токах применяются рычажные путевые переключатели. Принцип действия одного из исполнений таких переключателей показан на рис. 7.8. Контролируемый рабочий орган привода воздействует на ролик 1, укрепленный на конце рычага 2. На другом конце рычага находится подпружиненный ролик 3, который может перемещаться вдоль оси рычага. В указанном на рисунке положении замкнуты контакты 7 и 8. Положение контактов надежно зафиксировано защелкой 6. При воздействии на ролик 1 рычаг 2 поворачивается против часовой стрелки. Ролик 3 поворачивает тарелку 4 и связанные с ней контакты 8 и 9. При этом контакты 7 и 8 размыкаются, а 9 к 10 замыкаются.
Благодаря наличию пружин замыкание и размыкание контактов происходит с большой скоростью, не зависящей от скорости движения ролика 1. Это дает возможность отключать токи до 6 А при напряжении до 220 В постоянного тока. Возврат в исходное положение после прекращения воздействия на ролик 1 производится пружиной 5.
При большом числе переключаемых цепей и большой точности в качестве путевого переключателя применяется регулируемый коман-доконтроллер. Его вал связывается с рабочим органом либо непосредственно, либо через редуктор, согласующий движение рабочего органа и кулачковой шайбы. Контактные путевые переключатели обеспечивают точность срабатывания ±0,024 0,05 мм при износостойкости до (5 10)  )) переключений и благодаря простоте конструкции находят широкое применение. Для повышения надежности и долговечности в контактных путевых выключателях часто применяются герметичные магнитоуправляемые контакты-герконы, на базе которых, например, создана серия выключателей ВСГ. С контролиремым рабочим органом жестко связана пластина из магнитомягкой стали. Эта пластина входит в узкую щель, с одной стороны которой расположен геркон, а с другой — постоянные магниты. При вхождении в щель пластины через нее замыкается поток постоянного магнита Магнитный поток в герконе исчезает, и происходит его переключение Выключатель имеет замыкающий и размыкающий контакты, коммутирующие ток 0,01—1 А при напряжении постоянного тока до 110 В и ток 0,025 — 0,2 А при напряжении 220 В переменного тока Допустимая частота переключений достигает 6000 в час Износостойкость составляет 106— 108 переключений.
)) переключений и благодаря простоте конструкции находят широкое применение. Для повышения надежности и долговечности в контактных путевых выключателях часто применяются герметичные магнитоуправляемые контакты-герконы, на базе которых, например, создана серия выключателей ВСГ. С контролиремым рабочим органом жестко связана пластина из магнитомягкой стали. Эта пластина входит в узкую щель, с одной стороны которой расположен геркон, а с другой — постоянные магниты. При вхождении в щель пластины через нее замыкается поток постоянного магнита Магнитный поток в герконе исчезает, и происходит его переключение Выключатель имеет замыкающий и размыкающий контакты, коммутирующие ток 0,01—1 А при напряжении постоянного тока до 110 В и ток 0,025 — 0,2 А при напряжении 220 В переменного тока Допустимая частота переключений достигает 6000 в час Износостойкость составляет 106— 108 переключений.
Современные требования к надежности и увеличенной частоте срабатывания привели к созданию бесконтактных путевых выключателей. В таких выключателях контролируемый рабочий орган воздействует не на контакты, а на бесконтактные датчики.
Дата публикования: 2015-11-01; Прочитано: 1266 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
