 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
А) Расчет потоков рассеяния и индуктивности катушки без учета сопротивления стали. 2 страница
|
|
Вследствие большого индуктивного сопротивления рабочей обмотки при отсутствии тока в обмотке управления сила тока в цепи рабочей обмотки будет весьма невелика. Если по обмотке управления пропустить постоянный ток и довести сердечник до магнитного насыщения, то переменный ток рабочих обмоток уже не будет создавать дополнительного изменяющегося магнитного потока. Индуктивное сопротивление рабочих обмоток резко снизится, и в соответствии с законом Ома ток, протекающий по этим обмоткам, значительно увеличится. При постепенном увеличении тока в обмотке управления также постепенно снижается переменный магнитный поток, создаваемый рабочими обмотками, и нарастает ток в цепи этих обмоток.
В магнитных усилителях устанавливаются две катушки Р1 и Р2 рабочей обмотки (см. рис. 2). Ими создаются согласные по направлению магнитные потоки, замыкающиеся во внешнем кольце магнитопровода усилителя. В среднем стержне с обмоткой управления магнитные потоки рабочих обмоток имеют противоположное направление, взаимокомпенсируются и не индуктируют э. д. с. в обмотке управления. Появление трансформаторной э. д. с. в управляющей обмотке могло бы привести к нарушению работы цепей управления.
Обмотка управления потребляет небольшую мощность. Благодаря этому с помощью небольшого тока, затрачивая незначительную мощность, можно регулировать в широких пределах достаточно большую по величине мощность нагрузки. Отсюда такие аппараты получили свое наименование усилителей.
Магнитный усилитель можно рассматривать и как регулируемый резистор в цепи переменного тока, изменение сопротивления которого производится с помощью управляющего постоянного тока.
Нагрузка Rн т. е. объект, в котором ток регулируется с помощью магнитного усилителя, включается в цепь рабочих обмоток. Нагрузкой магнитных усилителей часто являются обмотки возбуждения генераторов. Чтобы через нагрузку проходил постоянный, а не переменный ток, в цепь включается выпрямительный мост В.
Отношение тока нагрузки к току в обмотке управления называют коэффициентом усиления магнитного усилителя по току, а отношение мощностей нагрузки и управления — коэффициентом усиления по мощности. Коэффициенты усиления обычных магнитных усилителей обычно лежат в пределах от 50 до 200.
Увеличения коэффициентов усиления магнитных усилителей достигают применением обратной связи. Схемы таких усилителей показаны на рис. 2 
Рисунок 2. Схемы магнитных усилителей с обратными связями: а) внешней; б)внутренней
Усилитель оборудуется дополнительной обмоткой обратной связи ОС (рис. 2, а), которая устанавливается вместе с обмоткой управления и включается последовательно с внешней нагрузкой Rн. Через обмотку обратной связи проходит уже выпрямленный выходной ток рабочих обмоток. Создаваемый ею магнитный поток усиливает магнитный поток обмотки управления У1. В процессе работы магнитного усилителя при увеличении тока в обмотке управления увеличивается ток рабочих обмоток и одновременно возрастает ток в обмотке обратной связи, так как она включена последовательно с нагрузкой. Поэтому обмотка обратной связи усиливает действие обмотки управления. При небольшом увеличении тока управления происходит резкое изменение тока нагрузки. В рассмотренном усилителе была применена специальная обмотка обратной связи. Такие магнитные усилители называют усилителями с внешней обратной связью. В качестве обмоток обратной связи могут быть использованы и рабочие обмотки (рис. 2, б). В этом случае они как бы берут на себя дополнительную роль, а специальной обмотки обратной связи не имеется. Последовательно с каждой рабочей обмотки включается выпрямитель. Поэтому через катушки рабочих обмоток ток проходит только в одном направлении. Каждая катушка работает лишь в течение полупериода изменения величины переменного тока. В результате рабочие катушки создают магнитный поток одного направления, совпадающего с направлением магнитного потока управляющей (регулировочной) обмотки. Таким образом, рабочие обмотки усиливают действие регулировочной обмотки, увеличивая коэффициент усиления. Такая система обратной связи получила название внутренней. Внутренняя обратная связь упрощает устройство магнитного усилителя, так как не требует установки дополнительной обмотки.
Рассмотренные выше обратные связи являются положительными, приводящими к увеличению коэффициента усиления магнитного усилителя. Могут применяться при необходимости и отрицательные обратные связи, снижающие коэффициент усиления [1].
6.2. Усилитель с самонасыщением (МУС)
Положительную обратную связь можно обеспечить и без специальной обмотки обратной связи. Для этого последовательно с каждой рабочей обмоткой 2 реактора включают полупроводниковые вентили 4 (рис. 3). При таком включении по рабочим обмоткам реакторов L1 и L2 протекает выпрямленный пульсирующий ток (в один полупериод — ток i2 в другой полупериод — ток i2), постоянная составляющая которого обеспечивает дополнительное подмагничивание их сердечников 3. Следовательно в этом усилителе рабочие обмотки являются одновременно и подмагничивающими, т. е. имеет место внутренняя положительная обратная связь, при которой роль тока Iос обратной связи выполняет постоянная составляющая тока нагрузки. Коэффициент усиления по мощности такого усилителя весьма высок, так как большая часть мощности, необходимой для подмагничивания сердечников, забирается из цепи переменного тока и ток Iу в обмотках управления 1 может быть существенно уменьшен.

Рис. 3. Схема магнитного усилителя с самонасыщением

Рис. 4. Принципиальные схемы магнитных усилителей с самонасыщением с выходом на переменном (а) и постоянном (б) токе: 1 — обмотка управления; 2 — рабочая обмотка; 3 — сердечники; 4 — полупроводниковые вентили
В магнитном усилителе, показанном на рис. 4, а, в оба полупериода переменного питающее напряжения через рабочие обмотки реакторов L1 и L2 проходят попеременно пульсирующие токи i1 и i2, вызывая переменное насыщение их сердечников. При этом к нагрузке RH приложено переменное напряжение uн и через нее проходит переменный ток I. В усилителе, показанном на рис. 4,б, через рабочие обмотки также проходят попеременно токи i1 и i2, но через нагрузку Rн они проходят всегда в одном и том же направлении и к ней приложено постоянное напряжение Uн.
Магнитные усилители с самонасыщением используют в качестве регуляторов системы возбуждения генераторов на некоторых тепловозах. Если требуется регулировать электрические установки
большой мощности, то применяют трехфазные магнитные усилители.

Рис. 5. Схемы трансформаторов постоянного тока (а) и постоянного напряжения (б)
Трансформаторы постоянного тока и напряжения. С помощью магнитных усилителей можно создать трансформаторы постоянного тока и напряжения. Трансформатор постоянного тока представляет собой однофазный магнитный усилитель, состоящий из двух реакторов L1 и L2 (рис. 5,а), у которых рабочие обмотки 1 соединены последовательно. Обмотки подмагничивания также соединяют последовательно и встречно или их роль выполняет кабель 2, пропущенный через окна сердечников обоих реакторов. При изменении постоянного тока I1, проходящего по цепи подмагничивающей обмотки или по кабелю 2, изменяется насыщение сердечников, а следовательно, и переменный ток I2 в цепи рабочих обмоток. При работе усилителя на прямолинейной части характеристики управления ток I2 будет изменяться пропорционально току I1. С помощью выпрямителя 3 переменный ток I2 можно преобразовать в постоянный I’2, который также будет пропорционален току I1.
Трансформатор постоянного напряжения (рис. 5,б) выполняется так же, как и трансформатор постоянного тока, но его подмагничивающие обмотки 2 подключают через добавочный резистор к двум точкам, между которыми действует напряжение U1 постоянного тока. Рабочие обмотки 1 для повышения точности включают параллельно (в этом случае существенно снижаются э. д. с. четных гармоник, индуцируемых в обмотках 2). При изменении напряжения U1 изменяется ток подмагничивания I1, а следовательно, и ток I2 в цепи рабочих обмоток. При работе усилителя на линейной части характеристики токи I2, I’2 и выпрямленное напряжение U2 будут пропорциональны напряжению U1[3].
6.3. Двухполупериодные схемы МУС.
Однополупериодная схема (рис.6) практически не применяется из-за следующих недостатков:
1. Для ограничения наведенных в обмотке управления токов необходим балластный дроссель, наличие которого ухудшает выходные параметры МУС.
2. Прохождение рабочего тока лишь в течение одного полупериода уменьшает мощность нагрузки.
3. Схема пригодна для питания нагрузки только выпрямленным током.
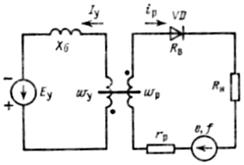
Рис. 6. Схема однополупериодного МУС
На рис. 7 изображены двухполупериодные мостовые схемы усилителя с нагрузкой на постоянном и переменном токе. При полярности вторичной обмотки питающего трансформатора, обозначенной на рис. 7, а, в верхнем усилителе МУС 1 имеет место рабочий полупериод, а в нижнем МУС 11 — полупериод управления. В следующем полупериоде МУС 11 будет находиться в рабочем полупериоде, а МУС1 — в полупериоде управления.
Рис. 7. Магнитный усилитель с самонасыщением: а — динамическая петля гистерезиса;
При большом сопротивлении в цепи управления переменная составляющая напряжения, наведенная на обмотках wy обмотками wр, создает малый переменный ток, которым можно пренебречь. Тогда по цепи управления протекает только ток Iу. Такой режим работы МУС называется режимом вынужденного намагничивания. В этом случае условия работы каждого МУС аналогичны рассмотренным ранее.
Обычно сопротивление цепи управления мало и для компенсации наводимых на обмотках wy ЭДС начала и концы обмоток должны соединяться, так, как показано на рис 8. Две обмотки управления могут быть заменены одной. При этом для схемы 8, а необходимо изменить направление включения рабочих обмоток wp (рис. 8).

Рис. 8. Схемы двухполупериодного МУС с общей обмоткой управления
6.4. Параметры МУС
Статические параметры
а) Крутизна характеристики управления. Для МУС характерна зависимость выходного напряжения Up только от ∆Bу:
Uр=U-2fwpS∆By (6.4.1)
Un= ηUp=η(U-2fωpS∆By).
Напряжение на нагрузке
Изменение индукции ∆B определяется током управления Iу. Как видно из (6.4.1), выходное напряжение Up не зависит от сопротивления рабочей цепи, и при данном токе управления МУС является управляемым источником напряжения. Если Rн  Rв+rp, то U мало зависит от сопротивления нагрузки.
Rв+rp, то U мало зависит от сопротивления нагрузки.
Характеристикой управления МУС называется зависимость выходного напряжения от тока управления Up(Iy) или напряжения на нагрузке от тока управления Uн(Iy).
Крутизна характеристики управления:

Подставляя в это выражение Uв получаем:
 .
.
Но  .
.
Следовательно,

Производная  характеризует наклон кривой размагничивания магнитопровода МУС и условно может определяться эквивалентной магнитной проницаемостью размагничивания
характеризует наклон кривой размагничивания магнитопровода МУС и условно может определяться эквивалентной магнитной проницаемостью размагничивания  Введем понятие индуктивного сопротивления размагничивания:
Введем понятие индуктивного сопротивления размагничивания:
Тогда имеем:
 ,
,
Таким образом:
 .
.
б) Коэффициент усиления МУС. Коэффициент усиления по току

Коэффициент усиления по напряжению:
 .
.
Коэффициент усиления по мощности:

Динамические параметры
в) Запаздывание. Под запаздыванием понимается выдержка времени между моментом скачкообразного изменения тока управления до момента появления тока нагрузки, соответствующего этому новому значению Iy в установившемся режиме. Простейший однополупериодный МУС с большим сопротивлением цепи управления Ry имеет малую постоянную времени, так как последняя обратно пропорциональна Ry. Однако, даже если постоянная времени очень мала, МУС имеет запаздывание. На рис. 9, а и б показано изменение напряжения на нагрузке при подаче управляющего сигнала в начале рабочего РП и управляющего УП полупериодов.
Пусть напряжению управления Un1 соответствуют индукция Вy1 управляющего поля и напряжение Uн1 на нагрузке (рис. 9, а). Насыщение магнитопровода происходит в момент ts1. При уменьшении отрицательного напряжения управления до значения UY2 на нагрузке должно установиться напряжение ия2. Насыщение магнитопровода происходит в момент ts2. Значение напряжения на нагрузке определяется значением Ву в начале второго РП В течение РП МУС неуправляем. Поэтому если напряжение управления изменилось до значения Uy2 в начале РП (рис. 9, а), то соответствующее ему значение Вy2 установится только во втором полупериоде. В третьем полупериоде установится новое напряжение на нагрузке Uн2, соответствующее Uy2.

Рис. 9. Эффект запаздывания в МУС:
а—напряжение управления изменилось в начале РП; б — напряжение управления изменилось в начале УП; в, г — изменение среднего значения напряжения на нагрузке МУС при подаче отрицательного (в) и положительного (г) сигналов управления
Если напряжение Uyt появится в начале УП (рис. 9, б), то новое значение напряжения Uн2 на нагрузке установится во втором полупериоде. Таким образом, даже в идеальном случае, когда  , МУС имеет запаздывание, которое может достигать 1—1,5 периода частоты питания. В двухполупериодном МУС запаздывание уменьшается до 0,5—1 периода. Такие усилители называются быстродействующими. Повышая частоту питания до 500—1000 Гц, можно получить очень малую инерционность усилителя.
, МУС имеет запаздывание, которое может достигать 1—1,5 периода частоты питания. В двухполупериодном МУС запаздывание уменьшается до 0,5—1 периода. Такие усилители называются быстродействующими. Повышая частоту питания до 500—1000 Гц, можно получить очень малую инерционность усилителя.
г) Постоянная времени, добротность. Если сопротивление Ry цепи управления велико, то мощность управления  увеличивается и kp падает. Для повышения kp и ku сопротивление Ry необходимо уменьшать. При малом Ry процесс перехода от одного стационарного режима к другому резко замедляется. Зависимость сохраняется и для переходного режима МУС, но ток управления iy, определяющий напряженность поля Hy, а следовательно, и значение ∆Вy, нарастает медленно. Скорость нарастания ty определяется индуктивностью цепи управления Ly. Для цепи управления можно написать
увеличивается и kp падает. Для повышения kp и ku сопротивление Ry необходимо уменьшать. При малом Ry процесс перехода от одного стационарного режима к другому резко замедляется. Зависимость сохраняется и для переходного режима МУС, но ток управления iy, определяющий напряженность поля Hy, а следовательно, и значение ∆Вy, нарастает медленно. Скорость нарастания ty определяется индуктивностью цепи управления Ly. Для цепи управления можно написать
 или
или 
Где 
Решение этого уравнения представляет собой экспоненту. При подаче на вход напряжения ∆Uy ток управления меняется по закону
 .
.
Переходный процесс в МУС с учетом запаздывания показан на рис. 9, е. До появления напряжения управления ∆Uy в нагрузке протекал максимальный ток при напряжении и Uн = Uн.нас. После подачи ∆U < 0 отрицательный ток управления нарастает по экспоненте. При этом увеличивается ∆Uy, a Uн падает по экспоненте с запаздыванием в один полупериод. На рис. 9, г показано изменение напряжения на нагрузке при уменьшении отрицательного напряжения управления (∆Uy > 0). Постоянная времени Ту определяется крутизной kR статической характеристики управления UH = f(Iy) и связана с параметрами МУС уравнением
 .
.
С ростом коэффициентов усиления увеличивается kR, а следовательно, и постоянная времени Ту. Для оценки быстродействия МУС вводится понятие добротности D=kp/Ty. Чем больше добротность D, тем меньше постоянная времени Ту и тем выше быстродействие МУС.
Воспользовавшись предыдущей формулой, получим
 .
.
В переходном режиме МУС можно представить инерционным звеном первого порядка, аналогичного цепи R, L, включенной на источник напряжения. Задача переходного режима решается в операторной форме

где ∆Uн(р) —приращение напряжения на нагрузке в операторной форме; ∆Uy(р)—соответствующее ему приращение напряжения на входе; Т/2 — время запаздывания, которое можно принять равным 1/(2f).
6.5. Влияние различных факторов на работу МУС
а) Свойства магнитного материала. На характеристику управления МУС большое влияние оказывают магнитные свойства материала магнитопровода. Для оценки свойств магнитного материала используется понятие коэффициента прямоугольности кривой намагничивания kn = Br/Bs. Чем больше kn, тем круче характеристика управления и больше ее линейная часть (рис. 11, а). При максимальном использовании магнитного материала рабочая точка на характеристике управления рис. 10, в занимает положение N. При этом напряжение на нагрузке
UномN=η(U-2fωpS∆By.ном),
где ∆Bу.ном — перепад индукции, соответствующий концу
линейного участка MN. Из этого можно получить


Рис. 10. Динамическая кривая размагничивания (а) и характеристики
управления МУС (б и в)

Рис. 11. Влияние различных факторов на характеристики МУС:
а —влияние коэффициента прямоугольности Iп; б — влияние обратного сопротивления диода Rобр; в — влияние сопротивления цепи управления R'y.
Где
 ,
,
Коэффициент  характеризует часть переменного напряжения, которая ложится на МУС в режиме максимальной отдачи. С ростом kп коэффициент
характеризует часть переменного напряжения, которая ложится на МУС в режиме максимальной отдачи. С ростом kп коэффициент  уменьшается, а увеличивается, что ведет к возрастанию напряжения и мощности нагрузки.
уменьшается, а увеличивается, что ведет к возрастанию напряжения и мощности нагрузки.
б) Свойства вентилей. Прямое сопротивление вентилей входит в общее сопротивление рабочей цепи. С увеличением прямого сопротивления уменьшается КПД η рабочей цепи усилителя.
На характеристику МУС существенно влияет обратное сопротивление вентилей Rобр (рис. 11, б). Если Rобр  , то в управляющий полупериод через рабочую обмотку проходит обратный ток, размагничивающий магнитопровод (увеличивается ДВУ), при этом напряжение на нагрузке и ток в ней уменьшаются.
, то в управляющий полупериод через рабочую обмотку проходит обратный ток, размагничивающий магнитопровод (увеличивается ДВУ), при этом напряжение на нагрузке и ток в ней уменьшаются.
Напряженность магнитного поля от обратного тока
 .
.
Для того чтобы обратный ток не сказывался на работе усилителя, необходимо соблюдение неравенства
 ,
,
где ∆Hy — напряженность поля управления, которая обеспечивает изменение тока Iн от Imin до Imax.
Чем лучше магнитный материал, тем меньше ∆Hy требуется для управления усилителем, тем меньше значение допустимого обратного тока.
в) Напряжение питания. Напряжение на нагрузке

При неизменном токе управления изменение индукции ∆By=const. Напряжение Uн прямо пропорционально питающему напряжению U. Крутизна и протяженность линейной части характеристики управления практически не зависят от питающего напряжения. Если напряжение питания U>4  , то напряжение холостого хода Uн0 растет пропорционально напряжению сети.
, то напряжение холостого хода Uн0 растет пропорционально напряжению сети.
г) Сопротивление нагрузки. Можно записать в виде
 .
.
Обычно Rн  и напряжение на нагрузке при этом условии мало зависит от сопротивления Rн. Ток нагрузки Iн=Uн/Rн меняется обратно пропорционально RH.
и напряжение на нагрузке при этом условии мало зависит от сопротивления Rн. Ток нагрузки Iн=Uн/Rн меняется обратно пропорционально RH.
Таким образом, МУС является управляемым источником напряжения.
д) Сопротивление цепи управления. На рис. 11,в представлены характеристики управления МУС при большом сопротивлении цепи управления  и при малом
и при малом  . В первом случае уменьшается взаимное влияние дросселей и процесс перемагничивания идет под действием Ry = const. Характеристика сдвигается влево и имеет достаточную крутизну (кривая 1). Во втором — характеристика сдвигается вправо в положение 2 и имеет
. В первом случае уменьшается взаимное влияние дросселей и процесс перемагничивания идет под действием Ry = const. Характеристика сдвигается влево и имеет достаточную крутизну (кривая 1). Во втором — характеристика сдвигается вправо в положение 2 и имеет
меньшую крутизну.
6.6 Быстродействующие магнитные усилители БМУ
Кроме рассмотренных усилителей с самоподмагничиванием, широкое распространение в бесконтактной автоматике получили быстродействующие усилители. Они названы быстродействующими потому, что их время запаздывания фиксированно и составляет точно половину периода питающего напряжения.
Основной ячейкой всех схем быстродействующих магнитных усилителей является односердечниковая схема, изображенная на рис. 12. Сердечник изготовляется из материалов с прямоугольной петлей намагничивания – пермаллоя разных марок. Эти материалы характеризуются большой остаточной индукцией, близкой к индукции насыщения. Поэтому сердечник, будучи предварительно насыщенным, сохраняет остаточный поток Фr и после снятия намагничивающего тока. Это свойство сердечника используется в быстродействующих усилителях.

Рис. 12. Схема быстродействующего магнитного усилителя
На сердечнике расположены рабочая обмотка и обмотка управления. Для простоты будем считать, что числа витков обеих обмоток одинаковы wу=wр=w. В цепь каждой обмотки включены источники переменной ЭДС e~ и вентили Дy и Дp. Направление вентилей и полярность ЭДС выбраны так, что одну половину периода может проводить только вентиль в цепи управления, а другую половину периода — только вентиль рабочей цепи. Кроме того, в цепь управления включен источник управляющей ЭДС ey, причем встречно с e~.
Также выполняется условие ey £ e~. Направление намотки рабочей и управляющей обмоток выбрано так, что ток рабочей цепи перемагничивает сердечник в одном направлении, а ток управления – в другом. Для подробного рассмотрения работы усилителя обратимся к диаграммам на рис. 13

Рисунок 13. Диаграммы напряжения, тока и потоков быстродействующего усилителя.
Пусть в начальный момент времени в сердечнике был остаточный поток Fr. Под действием разности ЭДС (е~-еy) сердечник будет перемагничиваться от точки 1 до точки 2 по кривой гистерезиса сердечника. Изменение потока за половину периода пропорционально заштрихованной площади на рис. 13 между кривыми е~ и еy и равно

В течение этого управляющего полупериода в цепи управления протекает небольшой намагничивающий ток im.
Таким образом, к началу рабочего полупериода сердечник оказывается полностью намагниченным. С наступлением рабочего полупериода сердечник начинает перемагничиваться в обратном направлении от точки 3 к точке 4. Но так как теперь к рабочей обмотке приложено только напряжение e~, то полное перемагничивание до точки 4 заканчивается раньше конца рабочего полупериода. Длительность этого интервала, названного ранее интервалом возбуждения, обозначена a и может быть определена из уравнения

где DФ - изменение потока, определенное по предыдущей формуле.
За интервалом возбуждения следует интервал насыщения, когда ток в рабочей цепи резко возрастает до значения, ограниченного сопротивлением нагрузки. Чем больше ey, тем меньше DФ и соответствующий ему угол a и тем больше среднее значение тока нагрузки.
Из всего сказанного следует, что быстродействующий усилитель в рабочий полупериод работает так же, как и рассмотренный ранее усилитель с самоподмагничиванием. Особенностью же его является то, что сердечник к началу рабочего полупериода полностью намагничивается в течение всего лишь одного управляющего полупериода, почему этот тип усилителя и назван быстродействующим с фиксированным временем запаздывания.
6.7 Реверсивные магнитные усилители
Реверсивными усилителями с выходом переменного тока называют усилители, изменяющие на 1800 фазу тока в нагрузке при изменении полярности тока управления. Такое изменение фазы необходимо при реверсе двухфазных двигателей, работающих в следящих системах, и т.п.
Существует три основных вида схем реверсивных усилителей этого типа:
1) Дифференциальная схема – нагрузку включают между средней точкой вторичных обмоток питающего трансформатора и общей точкой соединения двух одинаковых нереверсивных усилителей. Обмотки смещения и управления намотаны и взаимодействуют точно так же, как в реверсивных схемах с выходом постоянного тока. При отсутствии тока управления сердечники обоих усилителей подмагничены в одинаковой степени и выходные токи I1 и I2 усилители равны. Разность этих токов в нагрузке близка к нулю (обычно в нагрузке в этом режиме продолжают проходить токи высших гармоник). При подаче сигнала в обмотки управления в нагрузке появляется ток, равный разности токов İ1 -İ2, основная гармоника которого меняет фазу на 1800 при перемене полярности тока Iу (рис. 14,а).
Дата публикования: 2015-11-01; Прочитано: 1240 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
