 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Защита от вибрации
|
|
Линейные вибросистемы состоят из элементов массы, упругости и демпфирования. В общем случае в системе действуют силы: инерции, трения, упругости и вынуждающие.
Сила инерции, как известно, равна произведению массы М на ее ускорение:
 (6.10)
(6.10)
где v —виброскорость.
Сила FM направлена в сторону, противоположную ускорению.
Упругий элемент принято изображать в виде пружины, не имеющей массы (рис. 6.29, a). Чтобы переместить конец пружины из точки с координатой Хц (ненапряженное состояние) в точку с координатой x0, к пружине необходимо приложить силу; при этом сила действия упругого элемента, или восстанавливающая сила, будет направлена в ппотивоположную сторону и равна
 (6.11)
(6.11)
где G— коэффициент жесткости, Н/м; х= х1 – x0 —смещение концa пружины, м.
При вибрации упругих систем происходит рассеяние энергии окружающую среду, а также в материале упругих элементов и в узла сочленения деталей конструкции. Эти потери вызываются силами трения —диссипативными силами, на преодоление которых непрерывно и необратимо расходуется энергия источника вибрации*.

Рис. 6.29. Схематическое изображение элементов упругости (а)
и демпфирования (б)
Если рассеяние энергии происходит в элементе демпфирования (рис 6.29, б), т. е. в вязкой среде (среде с вязким сопротивлением), т диссипативная сила Fs прямо пропорциональна виброскорости и носи название демпфирующей:
 (6.12)
(6.12)
Сила Fs всегда направлена против скорости, коэффициент S (Н×с/м) называют импедансом, или сопротивлением элемента демпфирования.
Основные характеристики виброзащитных систем. К основным характеристикам виброзащитных систем отнесены собственная частота системы, механический импеданс и коэффициенты, определяющие процессы затухания вибраций и рассеяния энергии.
По аналогии с формулой (6.12) можно ввести общее понятие механического импеданса материальной точки при гармонической вибрации

где комплексное число ż, в полярной форме можно записать в виде  .
.
Найдем импеданс элементов массы и упругости. При заданной виброскорости У смещение х и ускорение о материальной точки находят интегрированием и дифференцированием:
 (6.13)
(6.13)
Подставив ускорение а в формулу (6.10), определяют импеданс элементa массы или просто импеданс массы zm.
 (6.14)
(6.14)
Таким образом, импеданс массы является мнимой положительной величиной, прямо пропорциональной частоте. Он достигает больших значений в диапазоне высоких частот. В диапазоне низких частот им можно пренебречь.
Подставив смещение х в формулу (6.11), находят импеданс элемента упругocmu żG.
Таким образом, импеданс элемента упругости является чисто мнимой отрицательной величиной, обратно пропорциональной частоте; в области высоких частот им можно пренебречь.
Импеданс элемента демпфирования является действительной величиной.
В общем случае вибросистему с одной степенью свободы можно изобразить в виде элемента массы, не обладающего деформацией, и элементов упругости и демпфирования, не имеющих массы (рис. 6.30). Точка О обозначает положение статического равновесия, от которого отсчитывается смещение х тела массой М под действием гармонической вынуждающей силы Ft. К телу также приложены сила инерции FM, восстанавливающая сила Fq и диссипативная демпфирующая сила Fs. В соответствии с принципом Д'Аламбера
 (6.16)
(6.16)
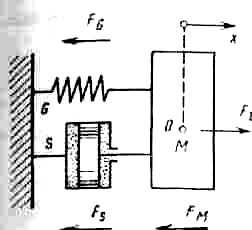
Рис. 6.30. Схема вибросистемы с одной степенью свободы
Свободная вибрация (Ft = 0) в отсутствии сил трения (Fs = 0) с течением времени не затухает. Виброскорость в этом случае определяется выражением (6.13), в котором амплитуда vm = const. Условие F̃m + F̃G = 0 с учетом выражений (6.14) и (6.15) позволяет определить собственную частоту вибросистемы
 '
'
Собственную частоту системы с одной степенью свободы (см. рис. 6.29, а) на практике определяют по прогибу А, исходя из равенства сил FG = FM в статике:
где g — ускорение свободного падения.
При наличии сил трения (FS ≠ 0) свободная вибрация (Ft = 0) затухает. Амплитуда виброскорости с течением времени убывает. Чтобы учесть это, вводят комплексную угловую частоту  , где d - коэффициент демпфирования. Поставив в выражение (6.13) частоту ẇ× вместо w получим
, где d - коэффициент демпфирования. Поставив в выражение (6.13) частоту ẇ× вместо w получим
 (6.17)
(6.17)
где vm(d) = vmd-dt — амплитуда виброскорости с учетом затухания.
Из уравнения  находят неизвестные величины d и w0×.
находят неизвестные величины d и w0×.
где  - критический импеданс элемента демпфирования. Таким образом, коэффициент демпфирования равен половине импеданса элемента демпфирования, приходящегося на единицу масы и свободная вибрация с затуханием осуществляется с частотой ẇ×, эависящей от отношения импедансов S/Sкр, которое характеризует силы трения в системе. При отсутствии диссипативных сил (S/Sкр = 0) частота ẇ× = w0; если же диссипативные силы имеют физическое значение, т. е. если S/Sкр = 1, то частота w0× = 0.
- критический импеданс элемента демпфирования. Таким образом, коэффициент демпфирования равен половине импеданса элемента демпфирования, приходящегося на единицу масы и свободная вибрация с затуханием осуществляется с частотой ẇ×, эависящей от отношения импедансов S/Sкр, которое характеризует силы трения в системе. При отсутствии диссипативных сил (S/Sкр = 0) частота ẇ× = w0; если же диссипативные силы имеют физическое значение, т. е. если S/Sкр = 1, то частота w0× = 0.
Вынужденная вибрация (Ft ≠ 0) происходят с частотой w вынуждающей силы. Из уравнения (6.16) определяют механический импеданс вибросистемы:
 (6.18)
(6.18)
Таким образом, импеданс вибросистемы складывается из импедан-сов элемента демпфирования, массы и упругости. Он имеет активную и реактивную составляющие. Его модуль и фазовый угол равны:
 (6.19)
(6.19)

Как следует из соотношения (6.19), импеданс вибросистемы имеет минимальное значение на частоте w = w0, при которой слагаемое в круглых скобках обращается в нуль, т. е. в резонансной области импеданс вибросистемы определяется импедансом элемента демпфирования (z = S). Вне резонансной области импедансом S можно пренебречь. Тогда из выражения (6.18) следует, что в диапазоне высоких частот движение определяется вибрирующей массой
(ż» jwM), а в диапазоне низких частот —жесткостью системы (ż» -jG/w).
Защитное устройство — упругодемпфирующий элемент. В большинстве случаев расчет сложных защитных устройств сводится к расчету простого защитного устройства, состоящего из элемента упругости и элемента демпфирования, соединенных параллельно. Реакция защитного устройства ^складывается из реакций упругого и демпфирующих элементов  Импеданс защитного устройства
Импеданс защитного устройства
 (6.20)
(6.20)
Если провести циклическое деформирование упругодиссипативного элемента по закону х = xmcoswt, то обнаруживается различие линий нагрузки и разгрузки (рис. 6.31) на диаграмме сила — смещение: точка, изображающая напряженное и деформированное состояние, описывает замкнутую кривую—петлю гистерезиса. Площадь, ограниченная петлей гистерезиса, выражает энергию ед рассеянную за один цикл демпфирования и равную работе диссипативных сил:


Рис. 6.31. Рассеяние энергии —гистерезисная петля
В начале и конце цикла деформирования смещения максимальны, виброскорость равна нулю и вся энергия, запасенная системой, равна потенциальной:

По формуле (6.8) находят коэффициент потерь и преобразуют его с учетом выражения для критического импеданса:
Тогда выражение (6.20) можно записать в виде
 (6.21)
(6.21)
Виброизоляция. Между источником вибрации и ее приемником, являющимся одновременно объектом защиты, устанавливают упругодемпфирующее устройство — виброизолятор — с малым коэффициентом передачи (рис. 6.32, а). Схематично система «источник вибраций —защитное устройство —приемник» показана на рис. 6.32, б. При возбуждении системы защитное устройство, расположенное между источником и приемником, воздействует на них с реакциями FR и FR¢. Ниже будут рассматриваться только безынерционные устройства, у которых реакции FR и FRравны.
Различают два вида возбуждения: силовое и кинематическое, при этом соответственно большую массу имеет приемник и его считают неподвижным или источник, и закон его движения считают заданным.
При силовом гармоническом возбуждении силой F̃t= Ḟm еjwt цель защиты обычно состоит в уменьшении амплитуды силы FR, передаваемой на приемник. Импеданс виброизолятора определяется формулой (6.21). Импеданс вибросистемы

Поток энергии на входе в ЗУ определяется усредненной за цикл яощностыо вынуждающей силы:
Поток энергии на выходе из защитного устройства определяется усредненной за цикл мощностью реакции защитного устройства:
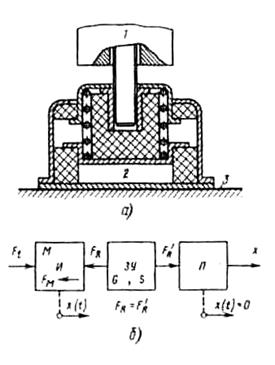
Рис. 6.32. Виброизоляция:
а— устройство виброизоляции (7—источник; 2— виброизолятор;
3— приемник); б- схема системы И—ЗУ—П
Отношение мощностей W+/W ~ называют силовым коэффициентом защиты kp=- z/ZR. Из соотношений F̃t = zv̌ и F̃R = żRv̌ видно, что он при определенных условиях равен отношению амплитуды вынуждающей силы к амплитуде силы, переданной на приемник.
При кинематическом возбуждении цель защиты обычно заключается в уменьшении передаваемого смещения. Степень реализации этой цели характеризуют динамическим коэффициентом защиты kX, равным отношению амплитуды смещения источника к амплитуде смещения приемника. Можно показать, что kX = z/ZR.
Pис. 6.33. Зависимость коэффициента виброизоляции от
отношения частот
В общем случае энергетический коэффициент защиты можно выразить в виде kW =kFkX.
По формуле (6.9) эффективность виброизоляции
В области высоких частот импеданс ż» żM (см. выше) и эффективность виброизоляции равна  . В частности, если демпфирующее сопротивление мало влияет на движение системы, то величиной η можно пренебречь. Тогда
. В частности, если демпфирующее сопротивление мало влияет на движение системы, то величиной η можно пренебречь. Тогда  , т. е. в области высоких частот почти вся энергия затрачивается на движение массы; поток энергии, передаваемой на приемник, обратно пропорционален квадрату частоты возбуждения, и эффективность виброизоляции тем выше, чем больше частота w.
, т. е. в области высоких частот почти вся энергия затрачивается на движение массы; поток энергии, передаваемой на приемник, обратно пропорционален квадрату частоты возбуждения, и эффективность виброизоляции тем выше, чем больше частота w.
В области низких частот ż» ż эффективность виброизоляции  , т. е. отрицательна или равна нулю.
, т. е. отрицательна или равна нулю.
В общем случае из выражения (6.22) следует, что эффективность виброизоляции

Если потери в защитном устройстве отсутствуют (η = 0), то эффективность

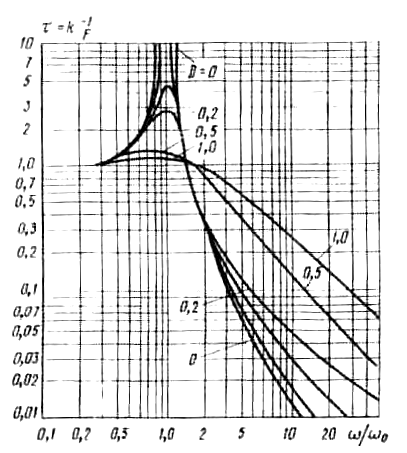
Из последнего выражения видно, что цель виброизоляции (е > 0),oбеспечивается в частотном диапазоне:  . На рис. 6.33 представлена зависимость коэффициента передачи t от отношения частоты вынуждающей силы к собственной частоте вибросистемы при разных значениях отношения импеданса демпфирующего элемента к его критическому значению, т. е. при разных
. На рис. 6.33 представлена зависимость коэффициента передачи t от отношения частоты вынуждающей силы к собственной частоте вибросистемы при разных значениях отношения импеданса демпфирующего элемента к его критическому значению, т. е. при разных
D = S/Sкр.
В качестве виброизоляторов используют упругие материалы и прежде всего металлические пружины, резину, пробку, войлок. Выбор того или иного материала обычно определяется величиной требуемого статического прогиба и условиями, в которых виброизолятор будет работать (например, температурой, химической агрессивностью рабочей среды и т. д.). Зависимость между статическим прогибом и собственной частотой для некоторых материалов показана на рис. 6.34.
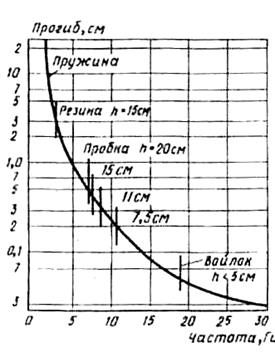
Рис. 6.34. Зависимость между статическим прогибом
и собственной частотой некоторых виброизолирующих
материалов: h — толщина материала
Резина имеет малую плотность, хорошо крепится к деталям, ей легко придать любую форму и она обычно используется для виброизоляции машин малой и средней массы (ДВС, электродвигателей и др.). В виброизоляторах резина работает на сдвиг и (или) сжатие. Жесткость резиновой подушки, работающей на сжатие, зависит от ее размеров и конструктивных особенностей, направленных на предотвращение распучивания резины в стороны при действии нагрузки.
Металлические пружины применяют обычно тогда, когда требуется большой статический прогиб или когда рабочие условия (например, температура, агрессивность среды) делают невозможным применение резины. Конструктивно пружинные виброизоляторы можно выполнить для работы практически на любой частоте. Однако металлические пружины имеют тот недостаток, что будучи спроектированы на низкую частоту (например, 15 Гц для ДВС), они пропускают более высокие частоты.
Большое применение находят конические дисковые пружины (рис. 6.35, а). Изменяя отношение h/t, получают необходимый прогиб. Конструктивно отдельные дисковые пружины можно соединять параллельно (рис. 6.35, б) или последовательно (рис. 6.35, в). При параллельном соединении нагрузка при заданном прогибе возрастает пропорционально числу дисков, при последовательном —прогиб при заданной нагрузке увеличивается пропорционально их числу. Отношение диаметров 2 R/B в большинстве случае выбирают равным 1,5...3,5.
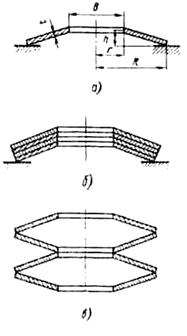
Рис. 6.35. Поперечное сечение дисковой пружины (а)
и соединения дисковых виброизоляторов
параллельное (б) и последовательное (в)
Пробку используют при нагрузке 50... 150 кПа, отвечающей рекомендованному диапазону упругости. Обычно установку сначала устанавливают на бетонные блоки и уже последние отделяют от фундамента с помощью нескольких слоев пробковой плитки толщиной 2...15 см. Увеличение толщины будет понижать частоту, выше которой виброизоляция эффективна, но при большой толщине возникает проблема устойчивости. Поэтому пробку не применяют в области низких частот. Нефть, вода, умеренные температуры оказывают незначительный эффект на рабочие характеристики пробки, но с течением времени от нагрузки пробка сжимается.
Войлок толщиной 1…2,5 см, занимающий площадь 5 % общей площади основания машины, весьма распространенный изолирующий материал. Он имеет относительно большой коэффициент потерь (η» 0,13) и поэтому эффективен на резонансных частотах. Обычно войлок применяют в частотном диапазоне свыше 40 Гц.
Динамическое виброгашение. Защита от вибраций методами поглощения, основанная на общих принципах, изложенных ранее, осуществляется в виде динамического гашения и вибропоглощения.
При динамическом гашении виброэнергия поглощается ЗУ. Это устройство, отбирающее виброэнергию от источника — объекта защиты—на себя, называют инерционным динамическим, виброгасителем. Его применяют для подавления моногармонических узкополосных колебаний. Инерционный динамический виброгаситель 2 простейшего типа. выполняют в виде твердого тела, упруго присоединяемого к объекту защиты 1 в точке, колебания которой требуется погасить (рис. 6-36, а). Защитное устройство, увеличивающее рассеяние энергии в Результате повышения диссипативных свойств системы, называют чоглотителем вибраций. На рис. 6.36, б показана схема простейшего поглотителя вибраций 3 вязкого типа, включающего твердые тела и демпфирующий элемент. Возможно применение комбинированных защитных устройств, использующих одновременно коррекцию ynpv-гоинерционных и диссипативных свойств системы. В этом случае говорят о динамических виброгасителях с трением 4 (рис. 6.36, в).
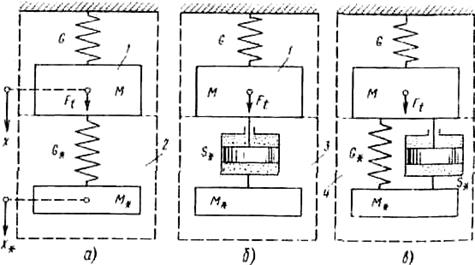
Рис. 6.36. Динамические виброгасители:
а — инерционный; б — поглотитель; в — с трением
Рассмотрим принцип динамического гашения на простейшем примере. Для инерционного динамического гасителя (рис. 6.36, а) можно записать систему двух уравнений описывающую вибрации:
Уже из второго уравнения видно, что при v* ¹ 0 виброскорость v объекта защиты будет равна нулю, если массу M* и жесткость G* динамического гасителя выбрать из условия:  , где w - частота вынуждающей силы Ft. Если это условие не выполняется (например, из-за некоторого отклонения частоты w вынуждающей силы от номинального значения, на которое настроен гаситель), то динамический гаситель может оказаться вредным. Поэтому инерционные динамические гасители применяют только в тех случаях, когда частота вынуждающей силы строго фиксирована в условиях эксплуатации (например, для гашения колебаний опор генераторов переменного тока). При возможном непостоянстве частоты вынуждающей силы необходимо вводить демпфирование.
, где w - частота вынуждающей силы Ft. Если это условие не выполняется (например, из-за некоторого отклонения частоты w вынуждающей силы от номинального значения, на которое настроен гаситель), то динамический гаситель может оказаться вредным. Поэтому инерционные динамические гасители применяют только в тех случаях, когда частота вынуждающей силы строго фиксирована в условиях эксплуатации (например, для гашения колебаний опор генераторов переменного тока). При возможном непостоянстве частоты вынуждающей силы необходимо вводить демпфирование.
Вибропоглощение. Вибропоглощение — метод снижения вибраций путем усиления в конструкции процессов внутреннего трения, рассеивающих виброэнергию в результате необратимого преобразования ее в теплоту при деформациях, возникающих в материалах, из которых изготовлена конструкция, и в местах сочленения ее элементов (заклепочных, резьбовых, прессовых и др.).
Количество рассеянной энергии принято характеризовать коэффициентом потерь h. С увеличением коэффициента h эллипс у петли гистерезиса (см. рис. 6.31) становится шире и все большая часть энергии переходит в тепловую. Если же h = 0, то механическая энергия не переходит в тепловую: энергия, передаваемая системе от источника в течение одного полупериода, возвращается к источнику за время второго полупериода. Можно показать, что коэффициент потерь связан с коэффициентом демпфирования соотношением:  . Подстановка этого выражения в формулу (6.17) наглядно показывает, что с увеличением коэффициента потерь вибрации прекращаются быстрее; метод вибропоглощения нацелен на получение повышенных значений коэффициента потерь в конструкции. В табл. 6.6 приведены ориентировочные значения коэффициента потерь некоторых материалов.
. Подстановка этого выражения в формулу (6.17) наглядно показывает, что с увеличением коэффициента потерь вибрации прекращаются быстрее; метод вибропоглощения нацелен на получение повышенных значений коэффициента потерь в конструкции. В табл. 6.6 приведены ориентировочные значения коэффициента потерь некоторых материалов.
Механические конструкции из небольшого числа разнородных деталей относительно большой толщины (например, корпус судна) имеют коэффициент h» 3×10-3 при f < 500 Гц и h» 10-3 при f > 1000 Гц; металлические конструкции из относительно большого числа разнородных толстостенных деталей (например, двигатель) или малого числа тонкостенных деталей (например, корпус автомобиля) имеют коэффициент h» 10-2; металлические конструкции из относительно большого числа разнородных деталей малой толщины (небольшие сложные агрегаты) имеют h» 5×10-2 при f < 500 Гц и h» 10-2 при f > 1000 Гц.
Таблица 6.6.
Дата публикования: 2015-07-22; Прочитано: 1173 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
