 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Механизмы наведения 2 страница
|
|
 — сила тяжести вращающейся части;
— сила тяжести вращающейся части;
 — реакции нижнего станка на верхний в подпятнике и на катках;
— реакции нижнего станка на верхний в подпятнике и на катках;
 — момент инерции вращающейся части при
— момент инерции вращающейся части при 
 — реакции подшипников нижнего станка;
— реакции подшипников нижнего станка;
 — коэффициент трения в подшипниках боевого штыря;
— коэффициент трения в подшипниках боевого штыря;
 — угловое ускорение вращающейся части. Остальные обозначения ясны из рисунка.
— угловое ускорение вращающейся части. Остальные обозначения ясны из рисунка.
Для определения зависимости усилия  от сил, действующих на верхний станок, необходимо составить уравнения равновесия. При этом для простоты выкладок будем полагать, что сила
от сил, действующих на верхний станок, необходимо составить уравнения равновесия. При этом для простоты выкладок будем полагать, что сила  тогда получим следующие уравнения равновесия:.
тогда получим следующие уравнения равновесия:.

Решая систему уравнений (14.47) относительно  , определим
, определим

Где  —постоянные для данной
—постоянные для данной
схемы верхнего" станка.
Максимальное значение усилия  будет при
будет при 
Максимальное значение углового ускорения определяется по формуле

где n — число оборотов маховика;
 — время разгона (
— время разгона ( с).
с).
Усилие, прикладываемое к рукоятке маховика в период разгона, можно определить по формуле

где  —средний радиус нарезки винта;
—средний радиус нарезки винта;
 — радиус маховика;
— радиус маховика;
 — угол подъема винтовой линии (по среднему диаметру нарезки винта);
— угол подъема винтовой линии (по среднему диаметру нарезки винта);
 — приведенный угол трения в нарезке винта.
— приведенный угол трения в нарезке винта.
Для трапецеидальной нарезки, применяемой в винтовом поворотном механизме, будем иметь
 *
*
где  —коэффициент трения между винтом и маткой;
—коэффициент трения между винтом и маткой;
 — половина угла профиля трапецеидальной нарезки (рис. 14.12,6).
— половина угла профиля трапецеидальной нарезки (рис. 14.12,6).
Для обеспечения самоторможения винтовой пары необходимо иметь

Величина усилия  _ определенная по формуле (14.50), не должна превышать установленных норм.
_ определенная по формуле (14.50), не должна превышать установленных норм.
Расчет деталей механизма на прочность производится на усилия, которые возникают при внезапном прекращении наводки, так как они значительно превосходят усилия, действующие во время наводки.
В случае резкой остановки вращающейся части принимается, что вся кинетическая энергия вращающихся масс переходит в потенциальную энергию упругой деформации деталей механизма. Для упрощения расчета предполагается, что деформации подвергаются винт на длине  и матка на длине
и матка на длине  (рис. 14.15), а остальные детали остаются недеформированными (абсолютно жесткими).
(рис. 14.15), а остальные детали остаются недеформированными (абсолютно жесткими).
Сила, которая вызывает деформацию винта и матки, определяется по формуле
где  — площади поперечного сечения винта и матки; — площади поперечного сечения винта и матки;
 — модули упругости первого рода для винта и матки. Зная величину силы Р, можно рассчитать вызываемое ею напряжение в винте и матке. — модули упругости первого рода для винта и матки. Зная величину силы Р, можно рассчитать вызываемое ею напряжение в винте и матке.
 Рис. 14.15. Ходовой винт с маткой
Рис. 14.15. Ходовой винт с маткой
|
Механизм вертикальной наводки, имеющий основную кинематическую пару, состоящую из шестерни и зубчатого сектора, называется секторным подъемным механизмом.
Секторный подъемный механизм (рис. 14.16) состоит из зубчатого сектора 2, прикрепленного к цапфенной обойме люльки 1, коренного вала 6 с шестерней 3, находящейся в зацеплении с сектором. Вал установлен в подшипниках верхнего станка, и на одном конце его закреплено червячное колесо 7, приводимое в движение червяком 8. Валик последнего посредством конической пары 4 соединен с валиком маховика 5 подъемного механизма.
При вращении маховика приходит во вращение червяк, который заставляет вращаться червячное колесо и связанный с ним коренной вал с шестерней. Последняя, находясь в зацеплении с зубчатым сектором, вынуждает качающуюся часть поворачиваться в плоскости, перпендикулярной оси цапф, благодаря чему и осуществляется вертикальная наводка ствола.
Звеном, обеспечивающим самоторможение механизма служит червячная пара (червяк с червячным колесом), которая воспринимает усилие, возникающее при выстреле в подъемном механизме;
другие детали, расположенные за червяком, находятся только под действием сил, возникающих при наведении.

|
Иногда червяк закрепляется так, что имеет возможность несколько перемещаться в осевом направлении, сжимая тарельчатые Такое упругое закрепление червяка применяется для
того, чтобы усилия, воспринимаемые червячной парой при выстреле и при резком прекращении наводки, по характеру своего действия приближались к статическим и поэтому не могли бы вызвать высоких напряжений в зубьях червячного колеса.
Передаточное число секторного подъемного механизма должно удовлетворять условию

где п — число оборотов маховика (при ручном приводе п =
>

 — требуемая скорость наводки, устанавливается тактико- техническими требованиями, град/с. Исходя из кинематической схемы механизма (рис. 14.16)
— требуемая скорость наводки, устанавливается тактико- техническими требованиями, град/с. Исходя из кинематической схемы механизма (рис. 14.16)

где  — передаточные числа конической, червячной и цилиндрической передач.
— передаточные числа конической, червячной и цилиндрической передач.
Так как

то

где  — число зубьев ведомых шестерен;
— число зубьев ведомых шестерен;
 ■—число зубьев ведущих шестерен;
■—число зубьев ведущих шестерен;
 ■— число зубьев червячного колеса;
■— число зубьев червячного колеса;
 — число заходов червяка. Как правило, передаточное число конических пар
— число заходов червяка. Как правило, передаточное число конических пар  .
.
Прежде чем установить величину  определяют число зубьев
определяют число зубьев  и
и  Из курса деталей машин известно, что для тихоходных передач минимальное количество зубьев должно быть не менее 12. Исходя из этого принимают число зубьев для коренной шестерни
Из курса деталей машин известно, что для тихоходных передач минимальное количество зубьев должно быть не менее 12. Исходя из этого принимают число зубьев для коренной шестерни  после чего определяют модуль зацепления по формуле
после чего определяют модуль зацепления по формуле

где  — относительная ширина коренной шестерни;
— относительная ширина коренной шестерни;
 —коэффициент формы зуба;
—коэффициент формы зуба;
 -—допустимое напряжение на изгиб;
-—допустимое напряжение на изгиб;  — коэффициент динамической нагрузки;
— коэффициент динамической нагрузки;  — коэффициент концентрации нагрузки;
— коэффициент концентрации нагрузки;
 — момент, действующий на зуб шестерни. Округлив полученное значение модуля до ближайшего по ГОСТ
— момент, действующий на зуб шестерни. Округлив полученное значение модуля до ближайшего по ГОСТ
находят шаг зацепления 
Число зубьев полной окружности сектора

где  —радиус начальной окружности сектора, где d — калибр; радиус
—радиус начальной окружности сектора, где d — калибр; радиус  округляют до получения целого числа
округляют до получения целого числа  I число зубьев сектора
I число зубьев сектора  определяют по формуле
определяют по формуле

где  —сектор вертикального наведения от
—сектор вертикального наведения от  до
до  Два зуба принимаются как запасные.
Два зуба принимаются как запасные.
Таким образом, передаточное число  определено.
определено.
Из условия самоторможения червячной пары число заходов червяка  берется равным единице, т. е.
берется равным единице, т. е.  . Тогда
. Тогда  откуда число зубьев червячного колеса
откуда число зубьев червячного колеса

Число зубьев червячного колеса должно быть не менее 28 для некоррегированных передач.
На червяк при выстреле действует окружное усилие

где  —реакция коренной шестерни на сектор люльки;
—реакция коренной шестерни на сектор люльки;
 — угол зацепления в эвольвентном профиле; согласно ГОСТ
— угол зацепления в эвольвентном профиле; согласно ГОСТ  ;
;
 — радиус червячной шестерни;
— радиус червячной шестерни;
 — радиус коренной шестерни.
— радиус коренной шестерни.
Реакция коренной шестерни на сектор люльки определяется на основании [6] по формуле 
где  —сила сопротивления откату;
—сила сопротивления откату;
 — расстояние по перпендикуляру от линии перемещения центра тяжести откатных частей до оси цапф;
— расстояние по перпендикуляру от линии перемещения центра тяжести откатных частей до оси цапф;
 — момент неуравновешенности;
— момент неуравновешенности;
 — текущие значения длины отката;
— текущие значения длины отката;
 — масса откатных частей;
— масса откатных частей;
 — угол зацепления;
— угол зацепления;
 коэффициент учета упругих свойств качающейся части:
коэффициент учета упругих свойств качающейся части:

По величине окружного усилия  определяют параметры (шаг t, модуль т, число зубьев Z) червяка и червячного колеса.
определяют параметры (шаг t, модуль т, число зубьев Z) червяка и червячного колеса.
Механизм горизонтального наведения, имеющий основную кинематическую пару, состоящую из шестерни и зубчатого сектора, называется секторным поворотным механизмом.
Схема устройства такого механизма показана на рис. 14.17. Основное отличие секторного поворотного механизма от подобного подъемного механизма состоит в том, что сектор 2 является неподвижным, а маховик 8 вместе с червячной парой, заключенной в коробке 5, шестерней 3 и верхним станком 7 вращается относительно оси (штыря) с угловой скоростью СО.
Действие такого механизма заключается в следующем. При вращении маховика движение передается червяку, который заставляет вращаться червячное колесо и связанный с ним вал шестерни. Последняя, находясь в зацеплении с зубчатым сектором лобовой коробки, заставляет вращающуюся часть орудия поворачиваться вокруг оси нижнего станка.
Звеном, обеспечивающим самоторможение механизма, является червячная пара (червяк и червячное колесо). Поэтому усилия, возникающие при выстреле и резком прекращении наводки со стороны вращающейся части, передаются в поворотном механизме на детали до червячного зацепления.
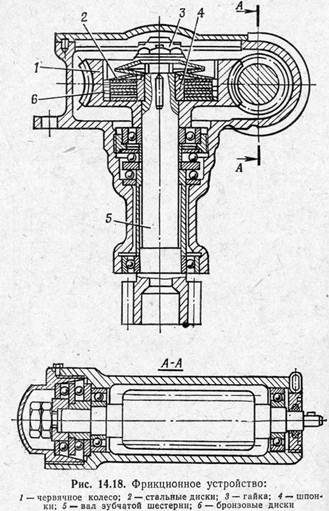
В большинстве конструкций для исключения поломки зубьев червячного колеса она закрепляется на вале зубчатой шестерни так, что может несколько поворачиваться относительно оси вращения. Такая подвижность соединения осуществляется посредством фрикционного устройства (рис. 14.18), основой которого являются три пары дисков. Каждая пара состоит из стального и бронзового дисков. Стальные диски 2 с помощью шлицев жестко связаны с валом 5 зубчатой шестерни, а бронзовые 6 жестко связаны с червячным колесом 1 с помощью выступов. Поверх всех дисков устанавливаются стальной верхний диск и тарельчатые пружины, которые поджимаются гайкой 3, навинчиваемой на хвостовик вала. Таким образом, червячное колесо соединяется с валом посредством трения между стальными и бронзовыми дисками.
При работе механизма вращение червячного колеса благодаря трению между дисками передается на вал зубчатой шестерни, которая, обкатываясь по сектору, поворачивает вращающуюся часть. При резком прекращении вращения маховика поворотного механизма вращающаяся часть, двигаясь по инерции, передает вращение на зубчатую шестерню с валом и червячное колесо. Червячное колесо с червяком тормозят движение вращающейся части. Если сила инерции вращающейся части большая, то зубчатая шестерня с валом будет проворачиваться относительно червячного колеса в тем самым исключит поломку зубьев червячного колеса.
Передаточное число секторного поворотного механизма

где  —передаточное число основной пары;
—передаточное число основной пары;
n —число пар зубчатых передач механизма, за исключением основной пары.

|
Таким образом, при неподвижном секторе передаточное число механизма будет выше из-за того, что передаточное число основной пары увеличивается на единицу.
Расчет зубьев червячного колеса на прочность производят по наибольшему усилию  , которое будет действовать в червячной передаче при внезапном прекращении наводки.
, которое будет действовать в червячной передаче при внезапном прекращении наводки.
Величину  определяют по формуле
определяют по формуле

где  —момент трения во фрикционе;
—момент трения во фрикционе;
 — радиус начальной окружности червячного колеса.
— радиус начальной окружности червячного колеса.
Величина момента трения во фрикционе  определяется по формуле
определяется по формуле

где  —коэффициент трения между дисками фрикциона;
—коэффициент трения между дисками фрикциона;
 — сила, сжимающая диски (сила тарельчатых пружин);
— сила, сжимающая диски (сила тарельчатых пружин);
 — наружный и внутренний радиусы рабочих поверхностей дисков фрикциона;
— наружный и внутренний радиусы рабочих поверхностей дисков фрикциона;
Z — число рабочих поверхностей во фрикционе:
 >
>
n — число дисков. Для вращения поворотной части ведущим звеном (маховиком) необходимо выполнять условие
 J
J
где  —момент зубчатой шестерни в период разгона, равный моменту на червячном колесе. Из зависимости (14.35), подставляя вместо момента инерции качающейся части момент инерции вращающейся части, определяется величина момента
—момент зубчатой шестерни в период разгона, равный моменту на червячном колесе. Из зависимости (14.35), подставляя вместо момента инерции качающейся части момент инерции вращающейся части, определяется величина момента

Угол поворота Еращающейся части  цосле быстрого прекращения работы поворотного механизма находят по формуле
цосле быстрого прекращения работы поворотного механизма находят по формуле

где  —скорость горизонтального наведения при прекращении работы на поворотном механизме;
—скорость горизонтального наведения при прекращении работы на поворотном механизме;  — передаточное число основной кинематической пары (сектора и шестерни). Величина угла
— передаточное число основной кинематической пары (сектора и шестерни). Величина угла  должна быть в пределах 2'—5'. Большая величина угла
должна быть в пределах 2'—5'. Большая величина угла  говорит о недостаточности момента трения в фрикционе
говорит о недостаточности момента трения в фрикционе 
§ 14.3. ЭЛЕКТРИЧЕСКИЕ ПРИВОДЫ
Электрические приводы предназначаются для приведения в Действие механизмов наведения орудия. Их применение позволяет автоматизировать процесс и увеличить скорость наведения, а также облегчить работу расчета.
Как правило, электрические приводы состоят из следующих блоков (рис. 14.19): управляющего, усилительного, исполнительного и стабилизирующего блоков, источника энергии, предохранительного узла.
Управляющий блок вырабатывает управляющий сигнал различной величины и полярности. Он обычно состоит из потен-
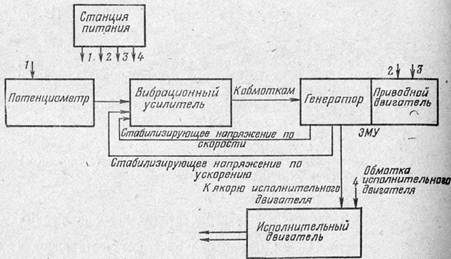 Рис. 14.19. Блок-схема электропривода
Рис. 14.19. Блок-схема электропривода
|
циометра и делителя напряжения, а размещается, как правило, в пульте управления привода.
 Рис. 14.20. Принципиальная схема управляющего блока
Принципиальная схема управляющего блока представлена на рис. 14.20.
Рис. 14.20. Принципиальная схема управляющего блока
Принципиальная схема управляющего блока представлена на рис. 14.20.
|
Управляющий сигнал снимается с точки О делителя напряжения и подвижного контакта потенциометра К■ При положении подвижного контакта К в точке  получают сигнал напряжения
получают сигнал напряжения  , а при положении подвижного контакта в точке
, а при положении подвижного контакта в точке  —сигнал
—сигнал  т. е. в зависимости от положения подвижного контакта К,
т. е. в зависимости от положения подвижного контакта К,

который перемещается наводчиком, получают сигнал требуемой величины и полярности, а следовательно, производят наводку с необходимой скоростью и в требуемом направлении.
Усилительный блок предназначен для усиления управляющего сигнала до мощности, достаточной для приведения в действие исполнительного двигателя. Как правило, усилительный блок состоит из вибрационного усилителя и электромашинного усилителя (ЭМУ).
Вибрационный усилитель выполняет роль как предварительного усилителя управляющего сигнала, так и переключателя обмоток ЭМУ, а электромашинный усилитель — окончательного.
ЭМУ — это устройство, позволяющее сигнал малой мощности усиливать до мощности, необходимой для приведения во вращение исполнительного двигателя. ЭМУ является агрегатом, состоящим из генератора и приводного двигателя, сидящих на одном валу.
дна из возможных электрических и конструктивных схем такого Усилителя представлена на рис. 14.21. На коллекторе генератора
расположены две пары щеток: 1—1 и 2—2. Щетки 1—/, выполняющие в генераторе роль основных щеток, замкнуты накоротко. К щеткам 2—2 присоединена внешняя цепь с нагрузкой 
При протекании относительно небольшого управляющего тока в обмотке управления  которая является входом усилителя,
которая является входом усилителя,
в генераторе возникает магнитный поток  . Этот поток индуктирует э. д. с. в обмотке вращающегося якоря. Под действием этих э. д. с. в обмотке якоря, замкнутой накоротко, через щетки 1—1 течет ток
. Этот поток индуктирует э. д. с. в обмотке вращающегося якоря. Под действием этих э. д. с. в обмотке якоря, замкнутой накоротко, через щетки 1—1 течет ток  совпадающий по направлению с э. д. с. Этот ток оказывается достаточно большим, так как сопротивление замкнутой якорной обмотки мало.
совпадающий по направлению с э. д. с. Этот ток оказывается достаточно большим, так как сопротивление замкнутой якорной обмотки мало.
Ток  вызывает появление потока реакции якоря
вызывает появление потока реакции якоря  , неподвижного в пространстве и перпендикулярного потоку
, неподвижного в пространстве и перпендикулярного потоку  . Поток
. Поток  значительно больше потока
значительно больше потока  , поскольку вызвавший его ток
, поскольку вызвавший его ток  достаточно велик, а магнитное сопротивление пути замыкания потока
достаточно велик, а магнитное сопротивление пути замыкания потока  относительно мало. Проводники обмотки якоря пересекают магнитные линии потока
относительно мало. Проводники обмотки якоря пересекают магнитные линии потока  , и в них возникает э. д. е., которая на выходе усилителя (зажимы 3—3) вызывает появление напряжения
, и в них возникает э. д. е., которая на выходе усилителя (зажимы 3—3) вызывает появление напряжения  используемого для питания обмотки исполнительного двигателя.
используемого для питания обмотки исполнительного двигателя.
Данная схема ЭМУ позволяет получить коэффициент усиления мощности управления:

где  _—мощность, отдаваемая генератором исполнительного двигателя;
_—мощность, отдаваемая генератором исполнительного двигателя;  — мощность управляющего сигнала.
— мощность управляющего сигнала.
Следует отметить, что ток  , протекающий по сопротивлению нагрузки и в обмотках якоря, вызывает появление потока реакции якоря, который устраняется компенсационной обмоткой КО, размещенной на внутренней поверхности статора и соединенной последовательно с обмоткой якоря (степень компенсации можно регулировать изменением сопротивления
, протекающий по сопротивлению нагрузки и в обмотках якоря, вызывает появление потока реакции якоря, который устраняется компенсационной обмоткой КО, размещенной на внутренней поверхности статора и соединенной последовательно с обмоткой якоря (степень компенсации можно регулировать изменением сопротивления  ). Для улучшения условий коммутации усилитель снабжен дополнительными полюсами с обмоткой ДО.
). Для улучшения условий коммутации усилитель снабжен дополнительными полюсами с обмоткой ДО.
Исполнительный блок преобразует электрическую энергию в механическую, т. е. непосредственно приводит в действие механизмы наведения. Основным звеном этого блока служит электрический двигатель с независимым возбуждением. Направление вращения и мощность, вырабатываемая этим двигателем, зависят от величины и полярности сигнала, подаваемого на якорную обмотку с ЭМУ.
Стабилизирующий блок обеспечивает устойчивую работу электропривода при малых (доводочных) скоростях наведения, а также уменьшает время разгона и торможения привода (форсирование переходных процессов). Стабилизация работы при- } вода осуществляется с помощью электрического сигнала отрида- -
тельной обратной связи, пропорционального скорости вращения исполнительного двигателя.
Источник энергии предназначен для выработки электрической энергии, которая -идет на приведение в действие блоков электрического привода.
Предохранительный узел обеспечивает автоматическое выключение электрического привода при походном положении орудия, при подходе вращающейся или качающейся части орудия к предельным углам наведения и при нарушении нормальной работы привода. Основными элементами предохранительного узла являются ограничители углов наведения, концевые выключатели и другие специальные устройства, которые разрывают электрическую цепь привода в случаях, указанных выше.
Управление работой привода осуществляется с пульта управления, а включение — с панели управления. Принцип действия электрического привода следующий: при включении электрического привода источник энергии начинает вырабатывать электрический ток определенного напряжения, который подается на пульт управления, на приводные двигатели ЭМУ и на обмотку возбуждения исполнительного двигателя. При подаче сигнала с пульта управления последний усиливается в усилительном блоке и подается на якорную обмотку исполнительного двигателя, приводя его якорь во вращение, который приводит в действие исполнительное звено механизма наведения.
Дата публикования: 2014-10-25; Прочитано: 767 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
