 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Анализ опасностей технических систем
|
|
Понятие и оценка риска. Встречается различное толкование понятия «риск», иногда в это понятие вкладывают смысл довольно сильно отличающийся друг от друга /3, 4, 8/.
Общим во всех представлениях о риске является то, что это понятие должно включать в себя:
- оценку неуверенности, произойдет или нет нежелательное событие,
- возможный ущерб от неблагоприятного события или состояния.
С понятием риска связывают представление о возможных или грозящих событиях с катастрофическими последствиями, поэтому иногда существует ошибочная точка зрения, что такое катастрофическое событие можно и нужно избежать любой ценой. Такое представление о нежелательных событиях часто явно формулируется, например, в правилах и инструкциях по технике безопасности.
Как нельзя создать вечный двигатель, так нельзя создать и технику, свободную от риска выхода из строя. Полностью свободной от риска техники, несмотря на самые большие затраты на её разработку, не существует.
Для выбора оборудования, сравнения различных образцов техники по опасности их эксплуатации существует необходимость количественной оценки понятия риска.
Величина риска определяется как произведение величины события на меру возможности его наступления:
R = A . q,
где А - последствия нежелательного события (экономические, социальные потери, потери этических ценностей, рис. 2.9),
q - вероятность наступления нежелательного события.
Если речь идёт о риске единичного события, в качестве последствия которого может произойти хотя бы одна жертва, то выражение для риска примет вид:
R1 = 1 . q,
т.е. риск будет численно равен вероятности наступления нежелательного события.

Рис. 2.9. Риск при принятии технических решений
Технологические системы и сложные технические сооружения имеют, как правило, несколько или много составных частей (n), выход из строя каждой из которых приводит к выходу из строя всей системы или сооружения. В этом случае риск при эксплуатации всей системы может быть оценён через вероятности выхода из строя отдельных i -вых её элементов, работающих независимо друг от друга:
n
Rсист = А å qi.
i =1
Описание характера риска требует определённого порядка и стадий исследования проблемы риска (рис.2.10). Разобраться и правильно оценить риск можно только с помощью системного анализа. Вспомогательное средство для такого анализа - дерево отказов технического средства, которое будет рассмотрено ниже.
Последовательность решения задачи выбора технического решения с учётом риска состоит из последовательных шагов: анализ учёта событий (имеющейся информации: причинные связи, результаты статистических исследований, экономические расчёты и т.п.), оценка риска на основе имеющихся данных, построение математической модели процесса и расчёт гипотетических вариантов задачи - решения задачи на основе минимального риска, минимизации риска или оптимизации риска.

Рис. 2.10. Порядок и стадии выбора технического решения с риском
При системном анализе и оценке риска прежде всего исключают все нерациональные варианты решения, при которых и материальные затраты (ущерб), и вероятность опасности (отказа) – наивысшие Rn. В отдельных случаях после этого первого шага (рис.2.11) может остаться единственное оптимальное решение.
В общем случае необходимо из оставшихся рациональных вариантов Rr выбрать один лучший.
Процедуры принятия решений с риском идут по общим правилам теории принятия решений, однако варианты дополнительно делят на группы риска:
n уменьшения риска,
n минимизации риска,
n оптимизации риска.
Решения, связанные с риском, всегда остаются для инженера сомнительными, поэтому приходится идти на необходимый, но оправданный риск. Для этого нужно знать уровень оценок риска.


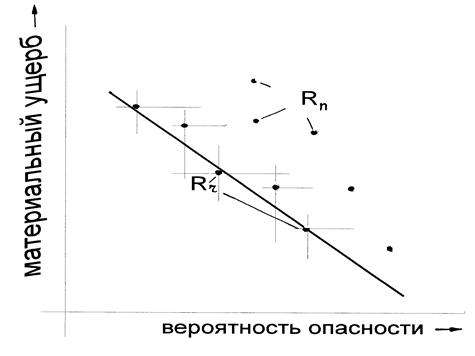
Рис.2.11. Анализ возможных рисков
Сравнение уровней риска. В зарубежных источниках информации /9/ приводятся статистические данные вероятности летального исхода по данным американских страховых компаний в 1974 году для 20,2 миллиона застрахованных лиц. Большой интерес представляют данные об уровнях риска летального исхода при различных видах деятельности, в различных отраслях хозяйства, при различных условиях деятельности.
Очевидно, что риск гибели на всех видах транспорта в США в течение одного часа для 20,2 млн. застрахованных составлял:
R = 20,2 . 106 . 3 . 10-7» 6 человек (см. табл.2.7), что выше среднего риска Rср» 1,4 чел., а риск гибели в автокатастрофе для любого гражданина, пользующегося в США автотранспортом в течение года, по данным табл. 2.8 составлял R1 = 0,27 10-3 чел/год, т.е. в 1974 году в течение года, практически, погибал один из каждых 4000 человек.
По данным /25/ производственный риск в СНГ в 1992 году составил R1 =10-4 (14 тысяч погибших на 140 млн. работающих).
Таблица 2.7
Вероятность летального исхода в отраслях хозяйства
| Отрасль хозяйства | q . 10-7 1/ч |
| Горные работы Транспорт Строительство Добыча полезных ископаемых Эксплуатация газового и гидрооборудования Металлургия Деревообработка Пищевая промышленность Целлюлозно-бумажная и печать Электротехника, точная механика, оптика Химия Торговля, коммунальные услуги Текстильная и кожевенно-обувная Здравоохранение | 0,6 0,6 0,6 0,5 0,4 0,4 0,4 0,4 0,3 0,2 |
| Средняя величина для 20,2 млн. застрахованных | 0,7 |
В /25/ приводятся сведения из официальной статистики МПС, которая свидетельствует, что риск гибели железнодорожников в процессе труда в течение года в 1993 году составил R1 = 1,38 10-4, что почти на порядок ниже, чем в целом на промышленном производстве. Ранее указывалось, что вероятность травмирования работников железнодорожного транспорта в 2002 году составила RТР = 7,5·10-4, 1/год, а риск гибели в этом же году составил R1 = 1·10-4, 1/год (1,14·10-8 1/ч).
Таблица 2.8
Вероятность летального исхода при различных видах деятельности
| Виддеятельности | q . 10-7 1/ч |
| Профессиональнаядеятельность Участие в движении транспорта Занятие домашним хозяйством Тяжёлые заболевания | 3...0,2 10...5 0,5 3...0,01 |
Интересно сравнение /25/ природных и техногенных катастроф по частоте и величине риска, а также по сопоставлению наносимых ими экономических последствий (ущербов). Указанные сравнения приведены на рис.2.12, рис.2.13, рис.2.14.
При проектировании и прогнозировании риска при эксплуатации технических устройств за рубежом принимается риск на уровне 10-7 чел/год в качестве допустимого при следующих условиях:
n сопоставление частот и величин риска, а также экономический анализ проведён до принятия решения и подтверждён практическими (экспериментальными или статистическими) данными;
n возможность риска проанализирована глубоко и всесторонне;
n после наступления неблагоприятного события вероятность риска для данного объекта не меняется;
n угроза риска не может быть более уменьшена оправданными затратами.
Таблица 2.9
Вероятность летального исхода при различных источниках или
условиях деятельности
| Источникили условия деятельности | По /10/ q . 10-7 1/год | По /1/ q . 10-7 1/год |
| Аварии автомашин Огонь и взрывы (пожар и ожог) Водоёмы (Утопление) Обращение с механизмами Воздушное сообщение Электричество Железная дорога Молния Общественный транспорт Радиоактивное излучение | - 5,5 0,45 0,05 | - 0,002 |

Рис.2.12. Частота и количество несчастных случаев, связанных с техникой
1 – суммарная кривая; 2 – общее число аварий самолётов; 3 – пожары; 4 – взрывы; 5 – прорывы плотин; 6 – выбросы вредных химических веществ; 7 – аварии самолётов (без пассажиров); 8 – 100 атомных реакторов

Рис.2. 13. Частота и последствия природных катастроф
1 - суммарная кривая; 2 - торнадо (смерчи); 3 - ураганы; 4 - землетрясения; 5 - падения метеоритов
. 
Рис.2.14. Объём ущерба, наносимый природными и антропогенными катастрофами
__________ природные катастрофы, ----------- антропогенные катастрофы
Анализ последствий ущерба, наносимых природными и антропогенными катастрофами, показывает, что угрозы природных катастроф в начале семидесятых годов существенно превосходили угрозы от эксплуатации техники, а риск летального исхода для любого человека всегда существует на уровне 10-6 и выше чел/год.
Интересно сравнение вероятностей отказа систем безопасности железнодорожного транспорта по данным /26/ с этим показателем, приведённым в табл.2.10.
Таблица 2.10
Вероятности отказа систем безопасности производственных процессов железнодорожного транспорта
(за период 1981-1990 г.г.)
| Система безопасности производственных процессов | Вероятность отказа, 10-7 .1/год | Интенсивность отказов, 1/год |
| В целом по МПС в том числе по управлениям: | 442,4 | |
| Перевозок | 72,7 | |
| Локомотивного хозяйства | 53,2 | |
| Вагонного хозяйства | 46,8 | |
| Пути | 102,5 | |
| Энергоснабжения и электрификации | 34,2 | |
| Сигнализации и связи | 9,99 | |
| Промышленного транспорта | 11,3 |
Анализ табл.2.10 показывает, что интенсивность отказов устройств безопасности железнодорожного транспорта намного превышает риск природного воздействия на человека (10-6) и допустимый риск, принимаемый в качестве такового за рубежом (10-7).
Матрица (таблица) решений. Далее речь идёт о выборе решений, т.е. одного из таких нескольких (не менее двух) состояний системы (машины, оборудования, технологического процесса), характеризующейся более чем одним показателем. Жизнь часто ставит перед человеком, даже в быту, задачу выбора решения из некоторого множества возможных вариантов.
Это может касаться приобретения телевизора, компьютера или других технических средств. В прайс-листе, например, для компьютера указаны стоимость, изготовитель, тактовая частота, объём памяти жёсткого диска, объём оперативной памяти, наличие сервисных плат и др. Таким образом, принятие решения в этом случае представляет собой выбор одного лучшего варианта из некоторого множества рассматриваемых вариантов.
В формальной структуре принятия решения каждый вариант Еi определяется некоторыми оценками еi. Эти оценки должны представлять количественные показатели. Каждый вариант представляет собой один из некоторого множества рассматриваемых вариантов Е:
Еi Î Е.
Число вариантов Е может быть конечным Еm или бесконечным Еi.
На практике, как правило, рассматривается конечное число вариантов.
Наиболее простым решением является выбор варианта с наибольшими (наиболее полезными) значениями оценок, т.е. целью выбора является определение варианта с показателем max ei.
Оценки ei характеризуют выигрыш, полезность или надёжность (в некоторых случаях отрицательные величины полезности).
Критерий с максимальными оценками формулируется следующим образом:
Множество оптимальных вариантов Ео состоит из таких вариантов Еio, которые принадлежат множеству Еi и имеют оценку еio, максимальную среди всех оценок еi:
Ео = { Еio / Еio Î Е Ù еio = max ei }.
Логический знак Ù требует, чтобы оба утверждения, им связываемые, выполнялись.
Рассмотренный случай характеризует наиболее простую модель выбора решения, когда каждому варианту решения соответствует одно состояние, т.е. однозначно определяется единственный вариант с максимальной оценкой еio.
На практике существуют более сложные структуры принятия решений, когда каждому варианту Еi соответствует состояние (фактор) Fi c целым набором оценок еij, о чём было сказано выше.
Семейство вариантов, их состояний (факторов) и оценок можно описать матрицей (таблицей) решений (табл.2.11).
Таблица 2.11
Матрица решений || еij ||
| Варианты | F1 | F2 | F3 | ... | Fj | ... | Fn |
| E1 | e11 | e12 | e13 | ... | e1j | ... | e1n |
| E2 | e21 | e22 | e23 | ... | e2j | ... | e2n |
| E3 | e31 | e32 | e33 | ... | e3j | ... | e3n |
| ... | ... | ... | ... | ... | ... | ... | ... |
| Ei | ei1 | ei2 | ei3 | ... | eij | ... | ein |
| ... | ... | ... | ... | ... | ... | ... | ... |
| Em | em1 | em2 | em3 | ... | emj | ... | emn |
Для выбора из семейства вариантов, их состояний (факторов) и оценок одного оптимального варианта необходим критерий выбора оптимального варианта или его оценочная функция.
Варианты оценочных функций при выборе решения. Для оценки m вариантов, каждый из которых имеет n состояний (факторов), вводится оценочная (целевая) функция для каждого варианта еir, т.е. для первого варианта е1r, для второго е2r и т. д. В этом случае матрицу решений || еij || можно превратить в матрицу оценочных (целевых) функций, состоящую из двух столбцов: столбца вариантов и столбца оценочных (целевых) функций. Такая матрица приведена в табл.2.12.
Таблица 2.12
Матрица оценочных функций
| Варианты | Оценочная (целевая) функция |
| Е1 | е1r |
| Е2 | е2r |
| Е3 | е3r |
| ... | ... |
| Еi | еir |
| ... | ... |
| Еm | еm |
Оценочная функция, характеризующая каждый вариант системы, может быть выбрана в зависимости от позиции оператора (конструктора), осуществляющего этот выбор. Разберём наиболее часто встречающиеся позиции.
1. Позиция компромисса между оптимистическим и пессимистическим прогнозом:
eir = min eij + max eij.
j j
Выбор варианта осуществляется по максимальному значению суммы комбинации из наибольшего и наименьшего результата:
max eir = max (min eij + max eij).
i i j j
2. Оптимистическая позиция:
Целевые функции представляют собой максимальные значения оценок:
eir = max eij .
j
Выбор варианта осуществляется по максимальному значению целевых функций:
max eir = max (max eij).
i i j
3. Позиция нейтралитета:
Целевые функции представляют собой средние значения оценок:
eir = 1/n  ij.
ij.
Выбор варианта осуществляется по максимальному значению целевой функции: 
max eir = max (1/n å eij).
i i
4. Пессимистическая позиция предполагает выбор наилучших целевых функций, составленных из наихудших оценок:
eir = min eij.
j
Выбор варианта осуществляется на основе выбора максимального значения целевой функции:
max eir = max (min eij).
i i
5. Позиция относительного пессимизма:
Оценочная функция представляет собой максимальное значение разности максимальной и текущей оценок, представляющей собой, по существу, максимальный разброс оценок:
еir = max (max eij - eij)
j i.
Выбор варианта осуществляется по минимальной величине оценочной функции или выбирается тот вариант, разброс оценок в котором минимален:
min eir = min max (max eij - eij).
i i j i
Выбор вариантов на основе подобных оценочных функций широко применяется в технике, например, при выборе электрооборудования (табл.2.13).
Таблица 2.13
Расчётные соотношения для выбора сечения проводов и аналогичные им критерии выбора по оценочным функциям

| № | Расчётные соотношения | Критерии выбора по оценочной функции |
| 1. | S = k1 I min | Пессимистическая позиция
  еij еij
|
| 2. | S = k2 I max | Оптимистическая позиция
 eij eij
|
| 3. | S = k3 
| Позиция нейтралитета
 
|
| 4. | S = k4 
| Позиция относительного пессимизма
 ( eij - eij) ( eij - eij)
|
Анализ табл. 7 показывает, что на практике критерий выбора определяется некоторыми качествами машин или технологических процессов, которые, например, ни при каких условиях нельзя нарушить. Так, выбор проводов для питающих линий внутри помещения производится по минимальному току (минимальной плотности тока), так как с одной стороны увеличение сечения проводов приводит к существенному удорожанию системы электроснабжения, с другой стороны даже небольшой и продолжительный нагрев проводов приводит к быстрому старению изоляции, а в экстремальных ситуациях и к возгоранию. Поэтому в таком случае применяется так называемая пессимистическая позиция, т.е. выбор варианта по минимальному значению оценки. Таким образом выбор критерия при исследовании вариантов всегда связан с большим количеством оценок и в значительной степени определяется позицией конструктора (оператора).
Пример. Возьмём любое объявление о продаже компьютеров и сведём параметры в табл. 2.14.
Таблица 2.14
Параметры компьютеров
| Вариант | Тактовая частота, МГц | Объём оперативной памяти, Мб | Объём памяти, Гб | Цена, $ |
| 0,54 | ||||
| 1,0 | ||||
| 0,54 | ||||
| 1,0 | ||||
| 0,85 | ||||
| 1,3 | ||||
| 1,0 | ||||
| 1,6 |
Для возможности выбора оценок приведём реальные показатели к долевым, принимая лучший показатель за единицу. Это позволит построить матрицу решений (табл.2.15).
Таблица 2.15
Матрица выбора варианта компьютера
| Варианты | F1 | F2 | F3 | F4 |
| E1 | 0,451 | 0,5 | 0,338 | 1,0 |
| E2 | 0,451 | 0,5 | 0,602 | 0,91 |
| E3 | 0,602 | 0,5 | 0,338 | 0,915 |
| E4 | 0,602 | 0,5 | 0,602 | 0,847 |
| E5 | 0,801 | 1,0 | 0,531 | 0,805 |
| E6 | 0,801 | 1,0 | 0,813 | 0,738 |
| E7 | 1,0 | 1,0 | 0,602 | 0,637 |
| E8 | 1,0 | 1,0 | 1,0 | 0,621 |
На основе матрицы решений составим матрицу оценочных функций для различных позиций при выборе решения (табл.2.16).
Сведём лучшие и худшие варианты выбора компьютеров по различным позициям при выборе оценочных функций в табл.2.17.
Из анализа табл. 2.17 можно сделать следующие выводы:
n применение некоторых позиций при выборе решения не всегда приводит к однозначному выбору варианта решения (в рассмотренном примере это касается оптимистической позиции),
n оптимальный вариант не всегда является самым дорогим вариантом.
Таблица 2.16
Матрица оценочных функций при выборе компьютера
| Вариант | Позиция компро-мисса | Оптимис-тическая позиция | Позиция нейтра-литета | Пессими-стическая позиция | Относи-тельный пессимизм |
| Е1 | 1,338 | 1,0 | 0,572 | 0,338 | 0,662 |
| Е2 | 1,361 | 0,91 | 0,616 | 0,451 | 0,459 |
| Е3 | 1,253 | 0,915 | 0,589 | 0,338 | 0,577 |
| Е4 | 1,347 | 0,847 | 0,638 | 0,5 | 0,347 |
| Е5 | 1,531 | 1,0 | 0,784 | 0,531 | 0,459 |
| Е6 | 1,738 | 1,0 | 0,838 | 0,738 | 0,262 |
| Е7 | 1,602 | 1,0 | 0,81 | 0,602 | 0,398 |
| Е8 | 1,621 | 1,0 | 0,905 | 0,621 | 0,379 |
Таблица 2.17
Результаты выбора варианта компьютера по различным
позициям при выборе оценочных функций
| Позиция при выборе оценочных функций | Лучший вариант | Худший вариант |
| Компромисс между оптимистическим и пессимистическим прогнозом | Е6 | Е3 |
| Оптимистическая позиция | Е1,Е5,Е6,Е7,Е8 | Е4 |
| Позиция нейтралитета | Е8 | Е1 |
| Пессимистическая позиция | Е6 | Е1,Е3 |
| Позиция относительного пессимизма | E6 | E1 |
Что касается рассмотренного примера, то оптимальным вариантом компьютера может считаться вариант Е6, так как этот вариант является наилучшим по большинству позиций выбора.
В рассмотренном примере оценивались только потребительские качества приборов. На практике наряду с ними приходиться считаться с параметрами надёжности техники и технологий, поэтому выбор технических решений оказывается более сложным процессом.
Графическое представление процесса выбора решения, поле выбора решения. Выбор варианта решения можно представить в виде геометрической задачи при наличии двух, но не более трёх оценок. Это определяется тем, что каждая оценка является параметром одной из осей двумерного или трёхмерного пространства. При наличии большого числа оценок (более трёх) при таком представлении решения получается многомерное пространство, которое невозможно представить в виде реального трёхмерного пространства.
 Ограничимся случаем, когда варианты решения определяются двумя факторами F1 и F2 и соответственно двумя оценками ei1 и ei2, при этом задача выбора будет представлена геометрической задачей выбора варианта решения на плоскости. Отложим на оси абсцисс значение оценок еi1, соответствующее факторам F1, а по оси ординат ei2,соответствующее факторам F2, где i = 1, 2, 3...m. Каждый вариант решения будет соответствовать точке на плоскости (рис.2.15).
Ограничимся случаем, когда варианты решения определяются двумя факторами F1 и F2 и соответственно двумя оценками ei1 и ei2, при этом задача выбора будет представлена геометрической задачей выбора варианта решения на плоскости. Отложим на оси абсцисс значение оценок еi1, соответствующее факторам F1, а по оси ординат ei2,соответствующее факторам F2, где i = 1, 2, 3...m. Каждый вариант решения будет соответствовать точке на плоскости (рис.2.15).
Рис. 2.15. Поле выбора решений
Точку с координатами max ei1 и max ei2 называют утопической точкой (УТ), а точку с координатами min ei1 и min ei2 называют антиутопической точкой (АУТ).
Все точки, лежащие внутри прямоугольника, стороны которого параллельны координатным осям, а противоположные вершины являются точками УТ и АУТ, лежат в поле полезности решений..
Выберем в поле полезности решений произвольную расчётную точку (РТ). С помощью прямых, проходящих через эту точку параллельно координатным осям, разобьём плоскость на четыре части и обозначим их I, II, III, IV.
Каждая из этих частей плоскости имеет вид прямоугольника, в случае трёхмерного пространства эти прямоугольники можно представить в виде конусов. Рассматривая положение точек поля полезности относительно четырёх «конусов» можно сделать следующие заключения:
n Все точки из конуса I согласно рассматриваемой модели выбора решений лучше, чем расчётная точка, поэтому конус I называется конусом предпочтения.
n Все точки конуса III хуже точки РТ, поэтому этот конус называют антиконусом.
n Все точки, расположенные в конусах III и IV, согласно модели выбора решений находятся в зоне неопределённости, поэтому эти зоны можно назвать областями неопределенности.
Если критерием выбора решения является оптимистическая позиция, т.е. позиция, характеризующаяся оценками с наибольшим «запасом прочности», но и с наиболее расточительным или затратным механизмом выбора решения:
max eir = max (max eij),
i i j
то решения будут располагаться выше биссектрисы, разделяющей области неопределённости пополам (затушёванная область на рис.9), а оценки, характеризующие пессимистическую позицию, располагаются ниже этой биссектрисы. Точки на самой биссектрисе характеризуют нейтральную позицию.
Критерии, применяемые при выборе решения, минимаксный критерий Байеса-Лапласа. Минимаксный критерий (ММ-критерий) достаточно широко применяется при процедуре выбора решений. ММ-критерий использует оценочную функцию ZMM, соответствующую позиции крайней осторожности, названную нами ранее пессимистической позицией. Кратко ММ-критерий можно выразить следующими условиями:
При ZMM = max eir и eir = min eij справедливо соотношение:
i j
Ео = { Eio/ Eio Î E Ù eio = max (min eij)}.
i j
Технология выбора может быть сформулирована иначе:
- матрица решений ½½ eij ½½ дополняется столбцом из наименьших оценок каждой строки 
- выбирается вариант со строкой, в которой находится наибольшее значение величины  этого столбца.
этого столбца.
Выбранные таким образом варианты основываются на конкретных оценках, величины которых не могут быть меньше оценок, принятых к рассмотрению, т.е. выбор варианта с худшими оценками исключён, поэтому такой выбор решения называют выбором вариантов без учёта риска.
Применение ММ-критерия бывает оправдано, если ситуация, в которой принимается решение, и решаемая проблема характеризуются следующими обстоятельствами:
- появление других внешних состояний (факторов) наряду с известными невозможно,
- необходимо исключить любой риск, т.е. вариант оценок меньших, чем ZMM недопустим,
- решение по выбору варианта реализуется только один раз.
До сих пор рассматривались факторы с характеризующими их оценками в виде некоторых вполне определённых значений величин. На практике, однако, чаще всего оценки не могут быть получены в виде вполне определённых величин, так как их значения чаще всего выбираются на основе экспериментальных данных и в этом случае «определённость» значения оценивается методами математической статистики и теории вероятностей. В другом случае, когда значение оценки задаётся на основе прогнозирования, значение величины оценки также может быть строго определено с некоторым риском, т.е. определённой вероятностью занижения или завышения результата по сравнению с реальностью. Вероятности, основанные на данных наблюдений (опытов), называют апостериорными, исходные вероятности, основанные на данных гипотез, называют априорными вероятностями.
Определение каждого из возможных вариантов оценок с учётом вероятности их появления qi впервые ввёл в теорию принятия решений американский учёный Байес. При выборе вариантов на этой основе можно говорить о принятии решения с риском.
Кратко критерий Байеса - Лапласа (BL-критерий) можно выразить следующими условиями:
При ZBL =  eir и eir =
eir и eir =  eij qj справедливо соотношение:
eij qj справедливо соотношение:
Eo = { Eio / Eio Î E Ù eio =  eij qj Ù
eij qj Ù  qj = 1}.
qj = 1}.
Технология выбора может быть сформулирована следующим образом: матрица решений || еij || дополняется ещё одним столбцом, содержащим математическое ожидание (среднее значение) каждой из строк eijqj; выбирается вариант со строкой, в которой находится наибольшее значение дополнительного столбца  eijqj, при этом сумма вероятностей появления оценок в строке должна быть равна единице.
eijqj, при этом сумма вероятностей появления оценок в строке должна быть равна единице.
BL-критерий применяется при выборе решений из вариантов, характеризующихся следующими обстоятельствами:
n вероятности появления оценок состояний Fj известны, а их значения не зависят от момента времени принятия решения,
n решение по выбору вариантов реализуется много раз,
n допустимый риск увеличивается при уменьшении числа вариантов решений.
Позиция BL-критерия несколько оптимистичнее, чем ММ-критерия, однако его применение предполагает более высокий уровень информированности об оценках вариантов решения, а также большое число самих вариантов решения.
Изложенные принципы принятия решений с риском дают только начальные представления о проблеме и при наличии математической подготовки на уровне высшего технического учебного заведения позволит читателю в последующем познакомиться с другим математическим аппаратом и методами, широко применяемыми в настоящее время для анализа, управления и диагностики системы «человек - машина- среда».
Анализ ситуаций выбора решения, процесс принятия решения. Под ситуацией выбора решения понимают взаимодействие всех элементов задачи, характеризующих человека-оператора, внешние факторы, факторы, характеризующие вариант выбираемой системы. Схематическое представление ситуации выбора решения приведено на рис.2.16.
В ситуации выбора решения основное влияние на выбор варианта оказывают:
n лицо, принимающее решение,
n количество и взаимосвязь параметров системы или процесса.

Рис.2.16.. Ситуация выбора решения
Практика показывает, что большинство технико-экономических решений принимается на основе интуиции и жизненного опыта, а принимающий решение ориентируется лишь на имеющийся личный запас математических знаний. Далее такой тип решений будем называть рутинным в отличие от исследовательского (рис.2.17).
 Рутинный Исследовательский
Рутинный Исследовательский
Рис. 2.17. Процессы принятия решений
В практике принятия решений относительно немногие процедуры принятия решений полностью обосновываются, а решение принимается на основе математической модели процесса.
Сами математические модели принятия решений могут быть различного уровня:
n эмпирические, в которых решение задач осуществляется на основе формул, отражающих те или иные физические процессы или явления,
n эмпирические, опирающиеся на некоторые сравнительные оценки, в которых осуществляется варьирование исходных данных,
n математические модели, построенные с исчерпывающей полнотой, отображающие не только реальную сущность процесса, но и позволяющие вносить в процесс изменения, которые в реальной жизни осуществить невозможно, а оценки факторов могут изменяться во всей генеральной совокупности их возможных изменений.
Графическое представление состояния системы и процесса решения, дерево событий и дерево решений. Графическое представление (граф) состояния системы и процесса принятия решения даёт наглядное представление о состоянии системы при различных ситуациях, о возможных альтернативных путях протекания процесса выбора и о результатах выбора.
В качестве примера построения графа состояния системы рассмотрим оценку вероятности выхода из строя системы, включающей три параллельно работающих агрегата А1, А2 и А3.
Обозначим Аi работоспособное состояние агрегата, а  i отказ агрегата.
i отказ агрегата.


Рис. 2.18. К определению графа состояния системы
Вероятность отказа каждого агрегата за один и тот же промежуток времени примем одинаковой: qi = 10-3.
При этих условиях легко построить граф состояния системы, исходным пунктом схемы (рис.2.18) будет являться узел, который в общем виде представляет собой состояние системы. Из этого узла «ветви» ведут к узлам, представляющим состояние одного агрегата, таким же образом следующие «ветви» представляют состояние второго и в общем случае последующих агрегатов, пока путь до выхода из графа не будет определять любые возможные комбинации событий (в данном случае отказов).
В результате такого построения получается «дерево событий», в котором каждый путь от исходной точки до конечного узла описывает одну из возможных эволюций системы (рис.2.19). В прямоугольниках указан результат события, соответствующий пути к этому конечному узлу, и результирующие вероятности состояния системы (вероятность события).
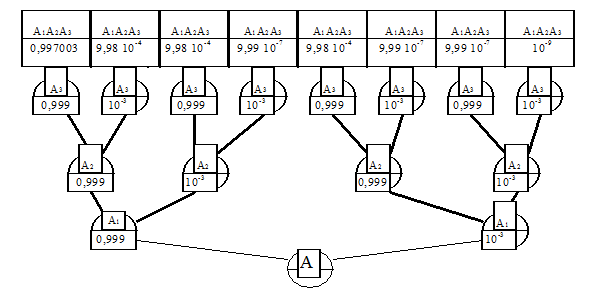
Рис. 2.19. Дерево событий (отказов)
Вероятность состояния всей системы из-за независимости состояний каждого из агрегатов определяется перемножением отдельных вероятностей.
Дерево событий можно преобразовать в дерево решений (рис. 2.20), в котором различают узлы событий С и узлы решений (действий) D. В узлах событий выбор дальнейшего пути определяется внешними условиями, а в узлах решений (действий) – лицом, принимающим решение.
 |
Рис.2.20. Схематическое дерево решений
Например, из узла D1 исходят мероприятия по техническому обслуживанию, например, регламентные проверки D1 - D2, D1 - D3, D1 - D4, при этом в каждом отдельном случае могут достигаться различные функциональные свойства, а следовательно изменяться вероятности событий в узлах дерева событий.
Деревья решений представляют собой логическую структуру принятия решений и облегчают понимание задачи и процесс её решения.
В отличие от матрицы решений здесь виден последовательный ход процесса принятия решения.
Дерево решений нельзя, однако, в общем виде представить матрицей решений, это можно сделать лишь для отдельных этапов процесса.
Разбиение на этапы производят так, чтобы выбор решения начинался с некоторого узла решений, от которого исходят одна или несколько ветвей, представляющих варианты решения. Далее следуют узлы событий и на конце - «листья», представляющие конечные состояния с указанием значений соответствующих выходных параметров (вероятностей).
В случаях, когда за узлами событий следует опять узел решений, тогда это и все последующие разветвления относятся к более поздней (следующей) стадии выбора решения.
Таким образом, весь путь с начала до конца дерева решений можно разбить на стадии выбора решения. Формализация решения заключается в переводе дерева решений в последовательность матриц, соответствующих отдельным этапам процесса, а само решение состоит в расчёте последовательности матриц.
Схемы принятия решений. Схемы принятия решений условно подразделяют на одношаговые и многошаговые.
Одношаговое принятие решений подразумевает выбор из множества вариантов решений оптимального варианта на основе однократной обработки с известной точностью множества подробной информации.
Многошаговое принятие решений подразумевает процесс с неоднозначной информацией, которая уточняется по мере многократного выполнения решения по выбору оптимального варианта из множества представленных вариантов.
В любом случае процесс принятия решения при неоднозначных оценках может быть различным в зависимости от применяемых критериев выбора:
n классические критерии, при применении которых процесс выбора решения концентрируется на заключительном этапе - этапе выбора оптимального варианта,
n гибкий критерий, при применении которого (рис.2.21) процесс выбора концентрируется на анализе информации и выборе оптимальных вариантов из совокупности доминирующих, которые могут быть дополнительно оценены с помощью программы обработки данных для окончательного выбора решения,
n производные критерии, при применении которых в математическую модель выбора вносятся (заданные или рассчитанные) дополнительные условия. В качестве таких условий могут быть: доверительные интервалы, допущения, границы риска.

Рис. 2.21. Процесс выбора решения на основе классических и гибкого (пунктир) критериев
Процесс поиска оптимального решения довольно сложная математическая задача /4/. Наиболее известным процессом поиска является итерационный метод: сначала проводят грубую дискретизацию непрерывного процесса (заменяют непрерывно изменяющиеся параметры дискретными значениями), рассчитывают решение в первом приближении, затем около этого приближенного решения формируют ряд более детально дискретизированных альтернатив и с большей точностью приближаются к оптимальному варианту.
Дата публикования: 2014-10-25; Прочитано: 1981 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
