 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Общие сведения. При проектировании (синтезе) систем автоматического управления принято разделять систему на неизменяемую и изменяемую части
|
|
При проектировании (синтезе) систем автоматического управления принято разделять систему на неизменяемую и изменяемую части.
В неизменяемую часть входят элементы, параметры которых или неизменяются вовсе или изменяются в очень малых пределах. Такие элементы выбираются из технических, технологических, технико-экономических и других соображений при составлении функциональной схемы синтезируемой системы. К ним относятся: объект управления, исполнительный орган, усилительные, измерительные, суммирующие, задающие и т.п. элементы.
В изменяемую часть входят элементы, параметры которых могут изменяться в широких пределах. Они используются для улучшения свойств системы в установившемся и переходном режимах. К ним относятся: усилители (дополнительные), интегрирующие звенья и корректирующие устройства.
В большинстве случаев оказывается, что система, спроектированная по функциональной схеме (неизменяемая часть), не удовлетворяет поставленным требованиям – либо она неустойчивая, либо её показатели качества в установившемся или переходном режиме не соответствуют допустимым значениям. При этой ситуации требуется коррекция статических (в установившемся режиме) или динамических (в переходном режиме) свойств системы.
Коррекция статических свойств системы сводится к выбору требуемого коэффициента передачи – kтр, когда задана допустимая ошибка в установившемся режиме – е(¥)доп или к включению в контур системы необходимого числа интегрирующих звеньев, если требуется чтобы ошибка равнялась нулю.
Получить требуемые показатели качества в переходном режиме можно двумя путями: изменением параметров звеньев, входящих в неизменяемую часть или включением специальных дополнительных элементов в контур проектируемой системы. Первый путь имеет весьма ограниченное применение, так как не всегда можно изменить в нужных пределах параметры объекта управления, исполнительного органа и т.п. Поэтому для коррекции динамических свойств САУ чаще всего применяются специальные звенья, которые называются корректирующими устройствами. Корректирующие устройства выпускаются промышленностью. Информация о них (электрические схемы, передаточные функции, соотношение параметров, логарифмические частотные характеристики) приводится в справочной и учебной литературе.
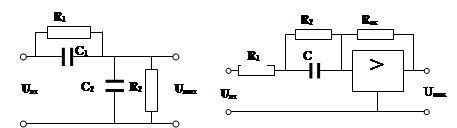
По конструктивному исполнению КУ делятся на пассивные и активные. Пассивные корректирующие устройства выполняются на элементах R, C, L. Их коэффициент передачи не может превышать единицу (поэтому они названы пассивными). Активные КУ выполняются на операционных усилителях. Коэффициент передачи активных КУ может быть больше единицы и его можно изменять в широком диапазоне. Примеры активного и пассивного корректирующих устройств приведены на рис. 4.1, а и 4.1, б.
 ,
, 

 ,
, 

а б
Рис. 4.1
В зависимости от способа включения в контур системы корректирующие устройства делятся на два типа: последовательные и параллельные. На рис. 4.2 представлены структурные схемы САУ: а) с последовательным КУ, б) с параллельным КУ.
 |
На рис. 4.2 использованы следующие обозначения:
Wнс (p) – передаточная функция нескорректированной САУ,
Wк (p) – передаточная функция последовательного КУ,
Wос (p) – передаточная функция параллельного КУ,
Wохв (p) – передаточная функция звеньев, охваченных параллельным КУ,
Wно (p) – передаточная функция звеньев, не охваченных параллельным КУ.
В теории автоматического управления коррекция динамических свойств САУ с применением КУ называется синтезом корректирующих устройств.
Синтезировать корректирующее устройство – это значит выбрать тип КУ, определить место включения КУ и выбрать типовое КУ, обеспечивающее требуемые динамические свойства проектируемой системы.
Выбор типа КУ решается сопоставлением преимуществ и недостатков последовательных и параллельных корректирующих устройств. Основными недостатками последовательных КУ являются большая чувствительность к помехам и необходимость включения дополнительного усилителя для компенсации уменьшения общего коэффициента передачи при использовании пассивных КУ. Эти недостатки отсутствуют у параллельных КУ. Поэтому в системах промышленной автоматики, если не ставится задача создания оптимальных САУ, чаще всего предпочтение отдаётся параллельным корректирующим устройствам. Исключения могут составлять случаи, когда последовательное КУ реализуется на том же операционном усилителе, который включается в контур САУ для коррекции системы в установившемся режиме.
Место включения КУ определяется исходя из того, чтобы само корректирующее устройство было наиболее простым, а эффект коррекции наибольшим. Последовательные КУ стремятся включать как можно ближе к входу системы. Параллельными ку рекомендуется охватывать звенья с наибольшими постоянными времени, расположенные как можно ближе к входу системы. Объект управления чаще всего не охватывают, так как это может приводить к усложнению коррекции за счёт применения дополнительных согласующих элементов.
Метод выбора типового корректирующего устройства (определение электрической схемы и передаточной функции КУ) зависит от того, как сформулированы требования, предъявляемые к качеству синтезируемой САУ. Если требования заданы допустимыми параметрами переходной характеристики (Tрег. доп, smax. доп% и ккол. доп), то следует применять метод, основанный на асимптотических логарифмических амплитудно-частотных характеристиках.
Сущность этого метода заключается в том, что строятся асимптотические логарифмические амплитудно-частотные характеристики (АЛАЧХ) корректируемой САУ и желаемая АЛАЧХ – Lж (ω). По этим характеристикам определяется логарифмическая частотная характеристика КУ и по ней подбирается типовое корректирующее устройство.
Построение необходимых логарифмических частотных характеристик корректируемой САУ, как правило, не вызывает затруднений. Поэтому подробнее остановимся на построении Lж (ω).
Желаемой логарифмической амплитудно-частотной характеристикой называется характеристика, которую должна иметь скорректированная система, чтобы удовлетворялись заданные требования в установившемся и переходном режимах.
Построение желаемой ЛАЧХ является важной и ответственной операцией, так как от вида Lж (ω) и её параметров зависят результаты синтеза. При построении Lж (ω) весь реальный диапазон частот от 0 до ¥ разбивается на три характерные зоны: низкочастотную (НЧЗ), среднечастотную (СЧЗ) и высокочастотную (ВЧЗ). Пример построения Lж (ω) приведён на рис. 4.3.
Низкочастотная зона Lж (ω) определяет качество синтезируемой САУ в установившемся режиме. Чтобы ошибка системы в установившемся режиме не превышала допустимое значение, необходимо провести Lж (ω) при ω = 1 через точку с ординатой, равной 20 lgkтр под наклоном минус  (kтр – требуемый коэффициент передачи САУ, ν – количество интегрирующих звеньев в контуре нескорректированной САУ). Другими словами, Lж (ω) в низкочастотной зоне должна совпадать с логарифмиче
(kтр – требуемый коэффициент передачи САУ, ν – количество интегрирующих звеньев в контуре нескорректированной САУ). Другими словами, Lж (ω) в низкочастотной зоне должна совпадать с логарифмиче 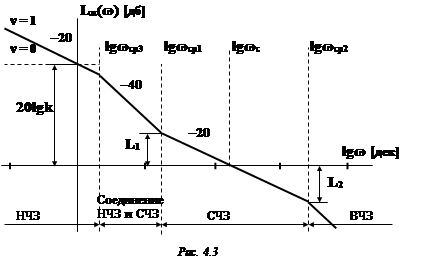 ской амплитудно-частотной характеристикой нескорректированной системы Lнс (ω).
ской амплитудно-частотной характеристикой нескорректированной системы Lнс (ω).
Среднечастотная зона является наиболее существенной частью характеристики Lж (ω), так как она определяет качество САУ в переходном режиме. Для получения у синтезируемой системы требуемых параметров переходного режима (Tрег ≤ Tрег. доп и smax ≤ smax. доп%) необходимо, чтобы она проходила под наклоном минус 20 дб/дек через частоту среза ωс и имела начальную ординату L1, а конечную L2.
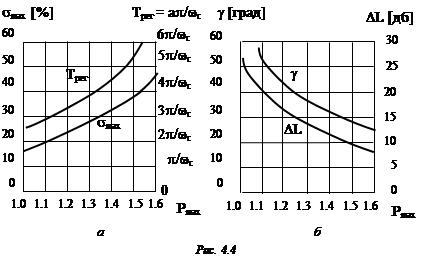
Многочисленными исследованиями установлено, что в линейных САУ параметры переходного режима (smax, Tрег и ккол), а также запасы устойчивости (по модулю – DL и фазе – g) зависят от параметров вещественной частотной характеристики, в частности, от максимального значения Pmax. Результатом исследований явились графики, приведённые на рис. 4.4.
По этим графикам можно найти параметры для построения среднечастотной зоны ωс, L1 и L2.
 Алгоритм определения ωс:
Алгоритм определения ωс:
· по заданному значению smax. доп% определяется (по кривой smax на рис. 4.4, а) численное значение Pmax,
· по Pmax находится (по кривой Tрег того же рисунка) соотношение между временем регулирования и частотой среза в виде формулы:
 , (4.1)
, (4.1)
здесь а определённое число,
· при заданном допустимом значении времени регулирования частоту среза можно найти по формуле:
 . (4.2)
. (4.2)
Ординаты начала и конца среднечастотной зоны L1 и L2 ориентировочно принимаются равными соответственно +DLтр и – DLтр. Здесь DLтр – требуемый запас устойчивости по модулю синтезируемой системы, который определяется по графику DL рис. 4.4, б. При необходимости можно изменять начальную и конечную ординаты, но следует помнить, что увеличение ширины среднечастотной зоны улучшает, а уменьшение ухудшает качество системы в переходном режиме. Минимальная ширина СЧЗ должна быть не менее одной декады.
Высокочастотная зона мало влияет на основные показатели переходного процесса. Поэтому её следует строить таким образом, чтобы не усложнялась электрическая схема корректирующего устройства. При этом необходимо ориентироваться на Lнс (ω).
Сопряжение низкочастотной и среднечастотной зон производится отрезком прямой линии с наклоном, равным – 40 или – 60 дб/дек.
Найдём соотношения Lж (ω) и логарифмических частотных характеристик корректируемой системы для определения ЛАЧХ последовательного корректирующего устройства. Для этого обратимся к структурной схеме, изображённой на рис.4.2, а. Разомкнём обратную связь и найдем передаточную функцию скорректированной – желаемой САУ:
 . (4.3)
. (4.3)
Перейдём к частотным передаточным функциям:
 . (4.4)
. (4.4)
Перейдём к логарифмическим частотным характеристикам:
Lж (ω) = Lк (ω) + Lнс (ω). (4.5)
Отсюда получим расчётную формулу для определения ЛАЧХ последовательного корректирующего устройства:
 Lк (ω) = Lж (ω) – Lнс (ω). (4.6)
Lк (ω) = Lж (ω) – Lнс (ω). (4.6)
Графически Lк (ω) можно определить простым вычитанием ординат Lнс (ω) из ординат Lж (ω).
Далее по виду Lк (ω) в справочной или учебной литературе подбирается электрическая схема типового корректирующего звена. Там же, как правило, приводится передаточная функция выбранного звена и соотношения его параметров. Если же передаточная функция отсутствует или её вид оказывается неудобным для дальнейших расчётов, то её следует записать по виду Lк (ω).
В некоторых случаях одним корректирующим устройством не удаётся реализовать найденную Lк (ω). Тогда допускается применение двух или трёх последовательно соединённых типовых звеньев.
В приложении 3 приведён пример синтеза последовательного КУ для системы, предлагаемой в настоящей лабораторной работе.
После того как выбрано корректирующее устройство, в обязательном порядке следует произвести проверку скорректированной системы на соответствие её заданным требованиям в переходном режиме. Проверку результатов синтеза КУ можно сделать аналитическим методом или методом структурного моделирования.
Учитывая значительную трудоёмкость расчёта переходных характеристик систем управления, аналитическая проверка делается в два этапа.
Сначала проверяются запасы устойчивости скорректированной САУ по модулю DLск и фазе gск. Если окажется, что полученные запасы устойчивости меньше требуемых, то синтез КУ следует сделать заново, начиная с построения Lж (ω).
Потом производится проверка качества. Для этого рассчитывается и строится переходная характеристика скорректированной системы и по ней определяются параметры переходного процесса Tрег. ск, smax. ск% и ккол. ск. Если окажется, что какой-либо из параметров не соответствует допустимому значению, то синтез КУ делается ещё раз, начиная с построения Lж (ω).
При проверке результатов синтеза методом структурного моделирования нет необходимости в промежуточной проверке (оценке запасов устойчивости скорректированной САУ), так как практически мгновенно после набора модели скорректированной системы на экране монитора можно получить переходную характеристику и найти параметры качества.
Кроме того, если окажется, что какой-то параметр переходной характеристики не соответствует заданному значению, то можно без повторных построений Lж (ω), изменением параметров модели корректирующего устройства добиться желаемого результата. Наконец, в некоторых случаях, метод моделирования позволяет простым перебором параметров КУ находить наилучший вариант синтеза КУ (более простое КУ или оптимальные значения параметров переходного процесса по быстродействию или отклонению).
Дата публикования: 2015-10-09; Прочитано: 1155 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
