 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Геометрія гвинтової передньої поверхні різальних інструментів
|
|
Різальні інструменти з гвинтовою передньою поверхнею можуть бути двох типів. Гвинтова передня поверхня може описуватися різальною кромкою при її гвинтовому русі. До подібних інструментів відносяться спіральні свердла, зенкери циліндрові і подібні до них інструменти. Гвинтова передня поверхня може створюватися при гвинтовому русі утворюючою, яка не співпадає з різальною кромкою. До таких інструментів відносяться циліндричні фрези з гвинтовим зубом і подібні до них інструменти.
Розглянемо геометрію передньої поверхні у інструментів, у яких передня поверхня створюється при гвинтовому русі різальної кромки (рис. 2.13.). У системі площин проекції П1/П2 зображається криволінійна різальна кромка і дотична АВ до неї в досліджуваній точці А. Дотична АВ разом з різальною кромкою здійснює гвинтовий рух, віссю якого служить пряма "О" перпендикулярна площині П1. Положення прямої АВ, паралельній площині П2, визначається величиною кута j і відстанню "r" від прямій АВ до осі О гвинтового руху. Положення досліджуваної точки А різальної кромки на прямою АВ визначається величиною кута m рівного:
 . (2.105)
. (2.105)
де Rx - радіус точки А різальної кромки;
кут mв дійсну величину проектується на площину П1 а кут j - на площину П2.

Рисунок 2.13 – Геометрія гвинтової передньої поверхні
Точка А при гвинтовому русі описує гвинтову лінію, кут wх нахилу дотичної АС до якої проектується в дійсну величину на площину П3. Площина П3 паралельна площині, яка в точці А дотикається круглого циліндра, концентричного осі "О".
Дві прямі АВ і АС визначають положення передньої площини Pv, дотичній в точці А до гвинтової передньої поверхні.
Визначимо інструментальний передній кут gи в нормальному до різальної кромки перетині.
Для цього введемо систему площин проекцій П2/П4. Площина П4 йде паралельно нормальній площині Рн, перпендикулярній різальній кромці АВ.
 За правилом зміни площин проекцій знаходимо проекцію А4С4 прямої АС на площину П4. Приймаємо, що інструментальна основна площина Рvі йде паралельно площині П2. В цьому випадку положення прямої А4С4 визначає інструментальний передній кут gі. Передня площина та інструментальна площина різання є площинами перпендикулярними площині П4. Тому пряма А4С4 співпадає із слідом передньої площини на площину П4.
За правилом зміни площин проекцій знаходимо проекцію А4С4 прямої АС на площину П4. Приймаємо, що інструментальна основна площина Рvі йде паралельно площині П2. В цьому випадку положення прямої А4С4 визначає інструментальний передній кут gі. Передня площина та інструментальна площина різання є площинами перпендикулярними площині П4. Тому пряма А4С4 співпадає із слідом передньої площини на площину П4.
Визначимо статичні передні кути, вважаючи що різальна кромка здійснює обертальний головний рух різання навколо осі "О".
Швидкість  головного руху різання буде в дійсну величину - проектуватися на площину П1 буде перпендикулярною, прямій O1A1 і розташовуватися на прямій АЕ. Дві прямі АВ і АЕ визначають положення статичної площини різання Рnс, перпендикулярній площині П4. Пряма А4Е4 визначає положення сліду Рnс статичної площини різання на площину П4. Положення прямої А4Е4 визначає кут tн між інструментальною площиною різання Рпі і статичною площиною різання Рnс. Статичний передній кут gн буде рівним:
головного руху різання буде в дійсну величину - проектуватися на площину П1 буде перпендикулярною, прямій O1A1 і розташовуватися на прямій АЕ. Дві прямі АВ і АЕ визначають положення статичної площини різання Рnс, перпендикулярній площині П4. Пряма А4Е4 визначає положення сліду Рnс статичної площини різання на площину П4. Положення прямої А4Е4 визначає кут tн між інструментальною площиною різання Рпі і статичною площиною різання Рnс. Статичний передній кут gн буде рівним:
 . (2.106)
. (2.106)
Відповідно до графічного рішення матимемо:
 , (2.107)
, (2.107)
Звідси:
 , (2.108)
, (2.108)
 , (2.109)
, (2.109)
 , (2.110)
, (2.110)
 . (2.111)
. (2.111)
Проектуючи замкнуту ламану лінію С2М2А2F2C2 на напрям A2F2 матимемо:
 , (2.112)
, (2.112)
 . (2.113)
. (2.113)
Таким чином:
 . (2.114)
. (2.114)
Перетворюючи отримаємо:
 . (2.115)
. (2.115)
Визначимо статичний кут нахилу різальної кромки lс в досліджуваній її точці А (рис. 2.14.). У системі площин проекцій П1/П2 зображається дотична АВ до різальної кромки в досліджуваній точці А, яка лежить в площині П2. Точка А лежить на осі проекцій. Положення прямої АВ, розташованої в площині П2, визначається величиною кута j. Вектор швидкості головного руху різання точки А лежить на прямій АЕ розташованій в площині П1. Положення прямої АЕ визначається величиною кута m. Дві прямі АВ і АЕ визначають положення статичної площини різання Рnс. Вертикальний слід Рnс2 цієї площини Рnс співпадає з прямою АВ, а горизонтальний слід співпадає з прямій АЕ. Для того, щоб визначити статичний кут нахилу lс різальної кромки повернемо статичну площину різання навколо горизонтального сліду Рn1с до поєднання з площиною проекцій П1. Суміщене положення вертикального сліду Рn2с позначене Р*n2с. Суміщене положення дотичної до різальної кромки буде А2В. Перпендикулярно швидкості головного руху різання проведемо слід Pvc статичної основної площини. Кут між різальною кромкою А2В і слідом статичної основної площини Pvc буде статичним кутом lс нахилу різальної кромки.
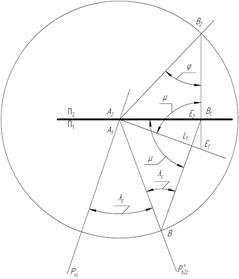
Рисунок 2.14 – Визначення  інструмента з гвинтовою передньою поверхнею
інструмента з гвинтовою передньою поверхнею
Відповідно до графічного рішення матимемо:
 , (2.116)
, (2.116)
 , (2.117)
, (2.117)
 . (2.118)
. (2.118)
Таким чином статичний кут lс нахилу різальної кромки буде рівним:
 . (2.119)
. (2.119)
Знак кута lс визначається напрямом повороту різальної кромки АВ до суміщення з основною площиною. У даному випадку поворот різальної кромки АВ до суміщення з основною площиною відбувається за годинниковою стрілкою і тому кут lс нахилу різальної кромки має негативне значення.
Розглянемо, наприклад, геометричні параметри різальної частини циліндричного зенкера. Графічне рішення цієї задачі приведене на рис. 2.15. Положення прямолінійної різальної кромки АВ зенкера, в системі площин проекції П1/П2, визначається кутом при вершині j і відстанню r, яка рівна:
 , (2.120)
, (2.120)
де R - радіус зенкера;
l1 - кут, вимірюваний на площині П1 між проекцією A1B1 різальної кромки і радіусом R=O1B1. Розглянемо довільну точку А різальної кромки, положення якої характеризується кутом m.
, (2.121)
де Rx - радіус точки А.
Інструментальний передній кут в точці А в нормальному перетині буде:
. (2.122)
Кут tн між інструментальною площиною різання і статичною площиною різання буде рівний:
. (2.123)

Рисунок 2.15 – Геометричні параметри різальної частини циліндричного зенкера
Статичний передній кут gнс в нормальному перетині рівний:
 . (2.124)
. (2.124)
Статичний кут нахилу lс різальної кромки буде:
 . (2.125)
. (2.125)
Кут l1 на зенкерах коливається від 0° до 25°.
Найчастіше швидкорізальні зенкери мають кут l1=0. Кут j при вершині коливається зазвичай в межах 45°¸60°, а кут w нахилу гвинтової канавки в межах w=15°¸25°.
Розрахунки по приведених залежностях показують, що при l1¹0 статичні передні кути gнс істотно зменшуються в порівнянні з інструментальними передніми кутами gи.
При l1=0, кут m=0, tgtN=0, tN=0. Інструментальний передній кут gи буде:
 . (2.126)
. (2.126)
У деяких підручниках по різанню металів по цій формулі визначають передній статичний кут, що є в загальному випадку при l¹0 наближеним рішенням.
При такій конструкції зенкера статичні передні кути змінюються у меншій мірі через зміну кута wx.
При j=90° матимемо:
 tн=0. (2.127)
tн=0. (2.127)
Інструментальний передній кут gі буде рівний статичному передньому куту gнс.
 . (2.128)
. (2.128)
Таким чином для того, щоб забезпечити меншу зміну статичних передніх кутів по довжині різальної кромки зенкера можна йти по шляху проектування інструменту з діаметрально розташованими ріжучими кромками (l1=0), або збільшувати кут при вершині зенкера j. При збільшеному куті при вершині j доцільно застосовувати подвійне заточування зенкерів з малими кутами j на периферії інструменту.
Дата публикования: 2015-10-09; Прочитано: 356 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
