 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Тема 5.7. Апаратура контролю і захисту підіймальних установок
|
|
План:
5.7.1. Визначники глибини.
5.7.2. Швидкостеміри.
5.7.3. Апарат завдання і контролю ходу.
5.7.4. Апарати захисту.
5.7.5. Кінцеві вимикачі.
5.7.6. Обмежувачі швидкості.
5.7.7. Схема управління.
5.7.1. Визначники глибини, які показують розміщення підіймальних посудин в кожен момент часу, бувають механічні і електричні.
Механічні визначники глибини колонкового типу безпосередньо зв’язані з валом машини. Через привідний вал і систему зубчатих передач обертання від корінного вала передається до двох вертикальних гвинтів, які обертаються в протилежні сторони. Гайки зі стрілками переміщаються одна вверх, а інша вниз, показуючи розміщення посудин в стволі.
Електричні визначники глибини не мають механічного зв’язку з корінним валом. Вони забезпечують високу точність визначення знаходження посудини в стволі. В сельсинному визначнику глибини УГС-4 (рис. 113) сигнал від сельсин-датчика, який механічно зв’язаний з валом підіймальної машини, поступає на сельсин-приймач 1. Через шестерні z 1 – z 9 обертання передається стрілці 3 грубого відліку. Кінцевим і іншим положенням посудин відповідає співпадання міток на візирі, кільцевої і нерухомої 4 шкал. Візир грубого відліку за цикл підйому робить не більше одного оберту, а кільцева шкала точного відліку – не більше 100 обертів. Дві стрілки 5 дозволяють спостерігати перехід машини на сповільнення. Контрольна лампа 6 сигналізує про останній оберт шкали точного відліку. 7 – лампи підсвічування.
5.7.2. Швидкостеміри показують величину швидкості в кожен момент часу, а також записують діаграму її зміни. Вони бувають механічні і електричні. Ртутно-поплавкові механічні швидкостеміри СШ-1 застосовують на машинах старих випусків.
В якості електричних швидкостемірів застосовують записуючі вольтметри, які отримують живлення від тахогенератора. Він обертається від корінного вала підіймальної машини, електрорушійна сила пропорційна дійсній швидкості підйому. Тому шкала (рис. 114) градуйована в м/с. Вісь рухомої частини з’єднана з тягою 1, до якої приєднана трубка 2. Один кінець трубки опущений в чорнильницю 3, а на другий насаджені записуючий капіляр 4 і стрілка 5, яка показує величину швидкості.
5.7.3. Апарат завдання і контролю ходу АЗК призначений для управління підіймальними машинами і контролю їх роботи. Він виконує наступні функції: надає імпульси в контрольованих точках руху для відповідних переключень в схемі автоматичного управління; задає програму ходу підіймальної машини; здійснює контроль фактичної швидкості; перетворює обертання вала підіймальної машини в електричні сигнали для вимірювання шляху; забезпечує захист від перепідйому; компенсує похибки при витяжці каната і зношуванні.

Рис. 113. Вказівник глибини Рис. 114. Швидкостемір
Апарат АЗК-1 (рис. 115) з’єднаний з валом 1, складається з шафи 2 з приводом, блоку програмування 3 при роз’їздах на максимальній швидкості БПМ-1 і пониженій швидкості 4 БПП-1, 5 – редуктор приводу апарату, 6 – обмежувач швидкості ЕОС-2, 7 і 8 – реле контролю обертання РКВ-1. Від редуктора приводу 5 обертання передається блокам сельсин-датчиків і тахогенераторам 9 і 10, а також блокам поверхових вимикачів 11 і 12, які подають імпульси в контрольованих точках шляху. В кожному блоці є 20 вимикачів, частина з яких спрацьовує при правому, частина при лівому обертанні вала АЗК. Корегуючі пристрої приводять у відповідність положення механізмів управління АЗК з положенням посудин в стволі. 15, 16 – редуктори програмних пристроїв 17 і 18. 19 – лінія зв’язку з вказівниками глибини.
На підіймальних машинах старих випусків встановлюють регулятори підйому (рис. 116). Вал 1 регулятора через зубчату 2 і черв’ячну 3 передачі передає обертання на профільований диск 4 заклиненого барабана підіймальної машини, а через передачі 5, 6 і 7 – на диск 8 переставного барабана. Пристрій 9 від’єднує диск 8 під час перестановки барабана. 10 – сельсин-датчики.

Рис. 115. Структурна схема АЗК-1 Рис. 116. Схема регулятора підйому
5.7.4. Апарати захисту необхідні для запобігання аварій підіймальних установок. Ці апарати, у випадку недопустимих відхилень контрольованих параметрів, вводять в дію запобіжні гальма і відключають електродвигун.
На рис. 117 показано коло захисту з контактором запобіжних гальм КТП і його зв’язок з колом контактів реверсора В і Н і колом гальмівного електромагніта ТП. Розрив вказаних кіл проводиться контактами КТП.
5.7.5. Кінцеві вимикачі служать для запобігання пере підйому посудин випускають контактними і безконтактними. Контактні вимикачі встановлюють в апараті контролю і завдання ходу, а їх контакти включені безпосередньо в коло захисту. Безконтактні вимикачі встановлюють на копрі. Найбільше застосування отримали магнітні вимикачі ВМ (рис. 118). Вони складаються з постійного магніту МВМ, який закріплено на підіймальній посудині, датчика ДВМ на копрі і станції управління СВМ, розміщеної в приміщенні підіймальної машини.


Рис. 117. Коло захисту Рис. 118. Кінцевий вимикач ВМ
Датчик ДВМ представляє собою чутливий елемент, що реагує на зміну зовнішнього магнітного поля. Станція СВМ являється транзисторним підсилювачем змінного струму, на виході якого включено електричне реле, контакт якого знаходиться в колі захисту.
Високочастотні безконтактні вимикачі ВБВ працюють на принципі зриву коливань генератора високої частоти шляхом екранування його контуру. Екраном являється корпус підіймальної посудини, або пластина на ньому.
5.7.6. Обмежувачі швидкості необхідні для того, щоб не допустити перевищення максимальної швидкості більше 15% порівняно з розрахунковою і підходу підіймальної посудини до верхньої підіймальної площадки зі швидкістю більше 1,5 м/с при транспортуванні вантажів і 1 м/с – людей. Обмежувачі швидкості базуються на принципі порівняння заданої і дійсної швидкостей підйому.
В електричному обмежувачі швидкості з апаратами РОС (рис. 119, а) застосовується тахометричний генератор ТГ постійного струму з незалежною обмоткою збудження ОВ, який приводиться в рух від підіймального двигуна ПД. Цей генератор є джерелом сигналу дійсної швидкості підйому. В зовнішнє коло генератора включені реле контролю швидкості РКС, реле перевірки кола РКЦ, резистор R3, реостати R1 і R2 для ходу відповідно “Вперед” і “Назад” і вентилі В1 і В2, необхідні для почергового включення реостатів. Опір реостатів змінюються за допомогою контролюючого профілю для підтримання постійного по величині струму в зовнішній мережі генератора ТГ. Для того щоб реле РКС не спрацьовувало під час прискореного руху, котушка його блокована блок-контактами реверсора БК1 і реостата БК2.
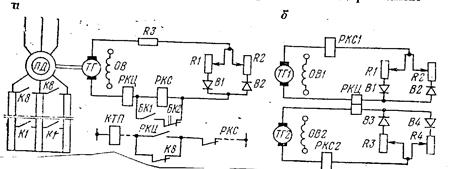
Рис. 119. Електричні обмежувачі швидкості з апаратами РОС
Автоматизовані підіймальні установки, згідно ПТЕ, повинні мати дублюючі обмежувачі швидкості: один з незалежним приводом, а другий від регулятора підйому. Дублюючі обмежувачі швидкості при застосуванні апаратів РОС (рис. 119, б) здійснюють взаємоконтроль своїх кіл за допомогою реле РКЦ. При неполадках в любому із кіл, порушеннях кінематичних зв’язків з тахогенераторами ТГ1 чи ТГ2 реле РКЦ спрацьовує, викликаючи запобіжне гальмування. Тахогенератор ТГ2 приводиться від регулятора підйому.
5.7.7. Управління підіймальними установками може бути автоматичне, напівавтоматичне, дистанційне і місцеве.
Повна автоматизація передбачає автоматичне виконання всіх періодів діаграми швидкості. Вибір методу автоматизації в окремі періоди визначається в першу чергу діаграмою зусиль.
В період розгону найбільше розповсюдження отримала схема автоматичного пуску по струму з додатковою витримкою по часу. Рівномірний рух забезпечується без використання засобів автоматики, використання яких передбачається в гальмівному режимі при спуску вантажів. Найбільш складним для автоматизації є період сповільненого руху, що пояснюється необхідністю точного підходу посудин до кінцевих пунктів, значними змінами навантаження, а також характеристиками асинхронного двигуна.
Привід з двигуном постійного струму має більш жорсткі характеристики, тому має кращі властивості для регулювання. Автоматичне регулювання приводом може бути здійснене одними і тими ж засобами у всі періоди діаграми швидкості як при додатних, так і при від’ємних зусиллях.
Взаємозв’язок приводу, апаратів управління і захисту встановлюється по схемі управління.
Контрольні запитання до теми 5.7:
5.7.1. Основні типи вказівників глибини.
5.7.2. Будова швидкостемірів.
5.7.3. Які функції виконує апарат АЗК?
5.7.4. Для чого використовують апарати захисту?
5.7.5. Типи і будова кінцевих вимикачів.
5.7.6. Типи і будова обмежувачів швидкості.
5.7.7. Як можна здійснювати управління підіймальними установками?
Дата публикования: 2015-09-18; Прочитано: 816 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
