 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Способы перемещения
|
|
7.4.1 Колёсные и гусеничные робот
Наиболее распространёнными роботами данного класса являются[9][10] четырёхколёсные игусеничные роботы. Создаются также роботы, имеющие другое число колёс — два или одно. Такого рода решения позволяют упростить конструкцию робота, а также придать роботу возможность работать в пространствах, где четырёхколёсная конструкция оказывается неработоспособна.

Рисунок 7.3 Сегвей в Музее роботов в Нагоя.
Двухколёсные роботы, как правило, для определения угла наклона корпуса робота и выработки подаваемого на приводы роботов соответствующего управляющего напряжения (с целью обеспечить удержание равновесия и выполнение необходимых перемещений) используют те или иные гироскопические устройства. Задача удержания равновесия двухколёсного робота связана с динамикой обратного маятника[11]. На данный момент, разработано множество подобных «балансирующих» устройств[12]. К таким устройствам можно отнести Сегвей, который может быть использован, как компонент робота; так например сегвейиспользован как транспортная платформа в разработанномНАСА роботе Робонавт[13].
Одноколёсные роботы во многом представляют собой развитие идей, связанных с двухколёсными роботами. Для перемещения в 2D пространстве в качестве единственного колеса может использоваться шар, приводимый во вращение несколькими приводами. Несколько разработок подобных роботов уже существуют. Примерами могут служитьшаробот разработанный в университете Карнеги — Меллона, шаробот «BallIP», разработанный в университете Тохоку Гакуин (англ. Tohoku Gakuin University)[14], или шаробот Rezero[15], разработанный в Швейцарской высшей технической школе. Роботы такого типа имеют некоторые преимущества, связанные с их вытянутой формой, которые могут позволить им лучше интегрироваться в человеческое окружение, чем это возможно для роботов некоторых других типов[16].
Существует некоторое количество прототипов сферических роботов. Некоторые из них для организации перемещения используют вращение внутренней массы[17][18][19][20]. Роботов подобного типа называют англ. spherical orb robots, англ. orb bot [21] и англ. ball bot [22][23].
Для перемещения по неровным поверхностям, траве и каменистой местности разрабатываются шестиколёсные роботы, которые имеют большее сцепление, по сравнению с четырёхколёсными. Ещё большее сцепление обеспечивают гусеницы. Многие современные боевые роботы, а также роботы, предназначенные для перемещения по грубым поверхностям разрабатываются как гусеничные. Вместе с тем, затруднено использование подобных роботов в помещениях, на гладких покрытиях и коврах. Примерами подобных роботов могут служить разработанный НАСА робот англ. Urban Robot («Urbie»)[24], разработанные компанией iRobot роботы Warrior и PackBot.
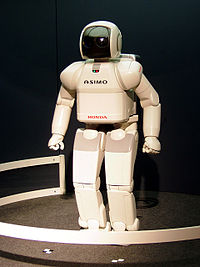
Рисунок 7.4 Робот-андроид ASIMO, производство Honda
Дата публикования: 2015-09-18; Прочитано: 512 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
