 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Классификация регуляторов
|
|
По наличию подводимой энергии регуляторы подразделяют на не имеющие вспомогательный источник энергии и имеющие таковой. У регуляторов без вспомогательного источника энергии для перемещения регулирующего органа используется энергия регулируемой среды. Они просты по конструкции, надежны в работе, не требуют внешних источников энергии, но имеют ограниченную мощность для приведения в действие регулирующего органа. Такие регуляторы применяют в тех случаях, когда для приведения в действие регулирующего органа не требуются большие усилия и для этого достаточно мощности измерительного устройства, а также, если к качеству переходного процесса не предъявляются жесткие требования.
У регуляторов с вспомогательным источником энергии перемещение регулирующего органа осуществляется дополнительным приводом, работающим от внешнего источника. Они требуют дополнительной внешней энергии и имеют более сложную конструкцию. Эти регуляторы способны обеспечить высокое качество регулирования.
По виду используемой энергии регуляторы делят на гидравлические, электрические и пневматические.
По виду регулируемой величины различают регуляторы температуры, давления, расхода, уровня, концентрации и других величин.
По характеру действия регуляторы подразделяются на имеющие прямую и обратную характеристики. У первых из них возрастание входного сигнала обусловливает увеличение выходной величины, а у вторых — наоборот.
По характеру регулирующего воздействия можно выделить регуляторы прерывистого и непрерывного действия. У регуляторов прерывистого действия непрерывному изменению входной величины соответствует прерывистое изменение регулирующего воз действия хотя бы в одном из элементов регулятора, существенным образом влияющее на работу регулятора в целом. В свою очередь они делятся на позиционные, а также импульсные. У регуляторов непрерывного действия непрерывному изменению входной величины соответствует непрерывное изменение его выходной величины.
По закону регулирования регуляторы непрерывного действия делят на интегральные, пропорциональные, пропорционально-интегральные, пропорционально-дифференциальные и пропорционально – интегрально - дифференциальные. В настоящее время при автоматизации химических предприятий используются позиционные регуляторы и в большей мере регуляторы непрерывного действия.
15. Регуляторы двухпозиционные идеальные и с зоной неоднозначности. Статические характеристики: математическое описание и графики. Область применения.
Позиционные регуляторы (Пз-регуляторы.). Позиционными, или релейными, называют регуляторы, у которых при изменении на входе выходная величина может принимать только определенные, заранее известные значения Переход от одного из этих значений к другому происходит очень быстро, практически мгновенно. Они просты по конструкции, надежны в работе, несложны в обслуживании и при настройке.
Наибольшее распространение получили двухпозиционные регуляторы, у которых выходная величина может принимать только два значения: минимальное или максимальное. Иногда такие регуляторы называют регуляторами типа «открыто» — «закрыто».
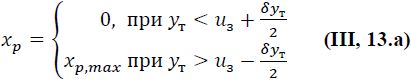
Таким образом, работа идеального (с однозначной характеристикой) Пз-регулятора может быть представлена в виде:

У регулятора с зоной нечувствительности выходная величина х изменяется от 0 до значения хр,max при у = и3+δyt /2 и от значения х р,мах до нуля — при у = и3 - δyt /2 (рис. 7III-3,б). Характеристика такого регулятора выражается следующим образом
В интервале
величина хр может принимать два значения (0 и xp,mах) в зависимости от предыдущих значений у. Переход с нижней ветви на верхнюю осуществляется при условиях:

а с верхней ветви на нижнюю — при условиях

Примерами Пз-регуляторов или двухпозиционных устройств могут служить электроконтактный термометр, биметаллический сигнализатор температуры, электроконтактный манометр, пневматическое реле и др.
Пропорционально-интегрально-дифференциальные регуляторы. Уравнения динамики для регуляторов с зависимыми и независимыми параметрами настройки. Переходные характеристики. Параметры настройки. Область применения.
Пропорционально-дифференциальные и пропорционально интегрально дифференциальные регуляторы (ПД- и ПИД - регуляторы). В ряде случаев качество регулирования можно повысить введением в закон регулирования составляющей, пропорциональной первой производной или скорости изменения входной величины регулятора. Эта дифференцирующая составляющая (Д-составляющая) формируется при помощи дополнительного устройства.
Уравнения динамики ПД- и ПИД - регуляторов имеют вид

где kp— коэффициент передачи регулятора; Ти — время интегрирования; Tд — время дифференцирования.
ПД - регулятор имеет два параметра настройки: предел пропорциональности δ и время дифференцирования Tд. ПИД - регулятор имеет три параметра настройки: предел пропорциональности δ, время интегрирования Tи и время дифференцирования Tд. Воздействие входной величины этих регуляторов на выходную повышается с уменьшением предела пропорциональности уменьшением времени интегрирования Tи и увеличением времени дифференцирования Tд.
При наличии Д-составляющей выходная величина регулятора х изменяется с некоторым опережением относительно входной величины, пропорциональным скорости ее изменения dy/dt. С уменьшением производной dy/dt опережающее действие регулятора также уменьшается и полностью прекращается при у = const; поэтому их называют регуляторами с опережением, или предварением.
Влияние Д-составляющей в ПД- и ПИД - регуляторах одинаково, поэтому далее будем рассматривать только ПД - регуляторы.
Влияние введения Д-составляющей в пропорциональный закон регулирования иллюстрируется графиком, приведенным на рис. III-13, где показаны изменение пропорциональной хП и дифференциальной х д составляющих, а также пропорционально-дифференциальной х пд составляющей, т. е. ПД - закона регулирования при непрерывном изменении входной величины у.
время дифференцирования Tд—это отрезок времени, на который выходная величина ПД - регулятора x пд опережает его пропорциональную составляющую x п при изменении входной величины с постоянной скоростью и при условии, что коэффициент передачи регулятора kp равен единице.
Передаточная функция W(p) такой системы, в соответствии с равенством (I,49) она равна
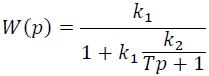
Разделив числитель и знаменатель полученного выражения на k1 и пренебрегая в знаменателе слагаемым 1/k1 получим
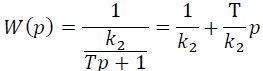
Вводя новые обозначения kр=1/k2 и Tд = T/k2, окончательно находим

Дата публикования: 2015-09-17; Прочитано: 2345 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
