 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Сполучена модель автоматів – С-автомат
|
|
Визначення. Під абстрактним С-автоматом розуміється математична модель дискретного пристрою, що задається вісімкою вигляду
С = (S, X, Y, U, d, l1, l2, {s0 }),
де S – множина внутрішніх станів, Х – вхідний алфавіт,
Y – вихідний алфавіт першого типу, U – вихідний алфавіт другого типу, d -функція переходів d:S´X®S; l1 - функція виходів першого типу l1:S´X®Y; l2 - функція виходів другого типу l2:S®U,
S0 – множина початкових станів.
Сполучений С-автомат представляється у вигляді пристрою з одним входом і двома виходами (рис. 19.7.).
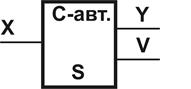
Рис. 19.7. Сполучений автомат С = (S, X, Y, U, d, l1, l2, {s0})
Відмінність С-автомата від автоматів Мілі і Мура полягає в тому, що він реалізує функції переходів і виходів, що були властиві їм окремо.
С-автомат представляється рівняннями системи:
s(t+1) = d(s(t), x(t))
y(t) = l1(s(t), x(t))
u(t+1) = l2(s(t))
де t = 0,1,2,…... Від С-автомата легко перейти до еквівалентних автоматів Мілі і Мура і навпаки.
Для завдання С-автомата використовуються також табличний і графічний способи.
Приклад. Таблиці переходів і виходів С-автомата d:S´X®S
Таблиця 19.3
| X\S | s1 | s2 | s3 | s4 | s5 | s6 |
| x1 | s6 | s6 | s4 | s3 | s4 | s1 |
| x2 | s4 | s3 | s5 | s5 | s5 | s2 |
Таблиця 19.4
| S | s1 | s2 | S3 | s4 | s5 | s6 |
| X\U | u1 | u1 | u3 | u3 | u2 | u2 |
| x1 | y1 | y1 | y2 | y1 | y2 | y2 |
| x2 | y2 | y1 | y1 | y2 | y1 | y1 |
Контрольні запитання
1. Що є стійким станом автомата?
2. Якій автомат Мура є синхронним, а якій асинхронним?
3. Що є стійким виходом автомата Мілі?
4. Якій автомат Мілі є синхронним, а якій асинхронним?
5. Які автомати можуть називатися еквівалентними?
6. Які умови задовольняють асинхронні автомати, що тактуються?
7. Як перетворити автомат Мура в автомат Мілі?
8. Що необхідно виконати для перетворення автоматів Мура і Мілі при графічному способі завдання?
9. Що необхідно виконати для перетворення автоматів Мура і Мілі при табличному способі завдання?
10. Як перетворити автомат Мілі в автомат Мура?
11. Що є розщепленням стану автомата Мілі?
12. Що необхідно виконати для перетворення автоматів Мілі і Мура при графічному способі завдання?
13. Що необхідно виконати для перетворення автоматів Мілі і Мура при табличному способі завдання?
14. Що є сполученою моделлю автомата – С-автоматом?
15. Яка відмінність сполученої моделі автомата від автоматів Мілі та Мура?
16. Як використати граф та таблицю для завдання сполученої моделі?
Дата публикования: 2014-11-18; Прочитано: 787 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
