 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Регулювання швидкості електропривода з двигуном постійного струму
|
|
Це питання розглянемо на прикладі двигуна постійного струму з незалежним збудженням (рис. 5.11), частота обертання якоря п (об/хв) якого визначається за формулою:
n =  (5.5)
(5.5)
де  - напруга джерела живлення, до якого підключене коло обмотки якоря, В;
- напруга джерела живлення, до якого підключене коло обмотки якоря, В;
 — струм, що протікає в колі обмотки якоря, А;
— струм, що протікає в колі обмотки якоря, А;
 - опір обмотки якоря, Ом;
- опір обмотки якоря, Ом;
 - додатний опір, що вводиться в коло обмотки якоря, Ом;
- додатний опір, що вводиться в коло обмотки якоря, Ом;
 — конструктивна стала машини;
— конструктивна стала машини;
Ф - магнітний потік, Вб.

Згідно з виразом (5.5), швидкість двигуна постійного струму можна регулювати за допомогою трьох параметрів:
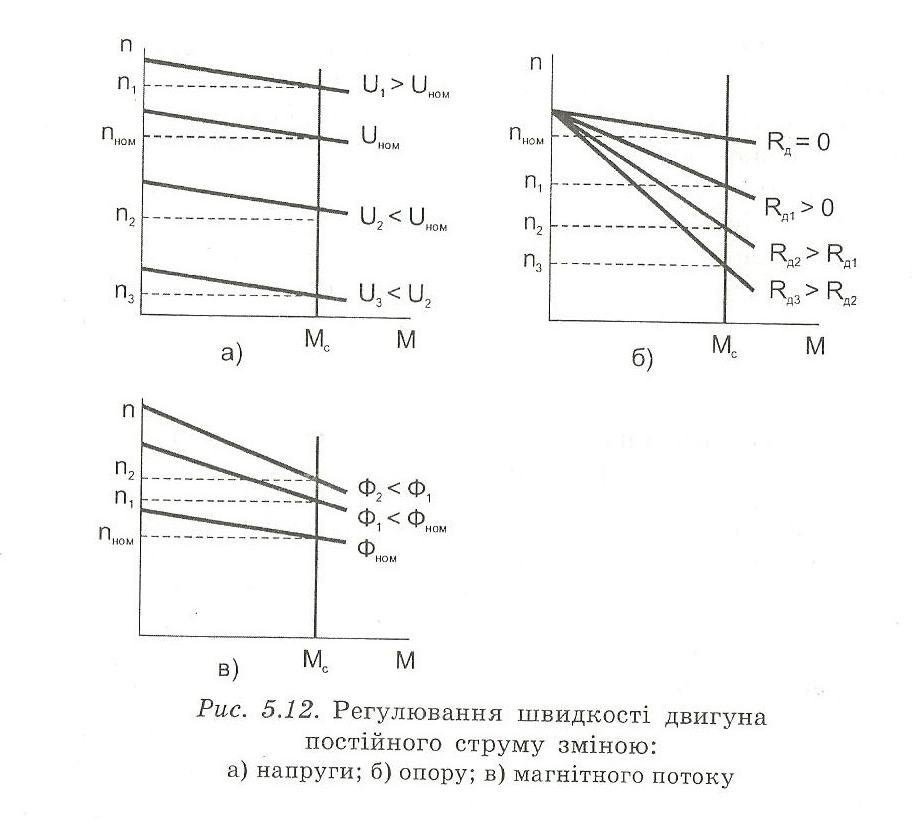
1. напруги джерела живлення  , до якого підключене коло обмотки якоря. Згідно з виразом (5.5) зміна зумовлює прямо пропорційну зміну частоти обертання якоря п (рис. 5.12 а). Цей спосіб регулювання може забезпечити плавне регулювання швидкості в діапазоні від нуля до номінального значення і вище;
, до якого підключене коло обмотки якоря. Згідно з виразом (5.5) зміна зумовлює прямо пропорційну зміну частоти обертання якоря п (рис. 5.12 а). Цей спосіб регулювання може забезпечити плавне регулювання швидкості в діапазоні від нуля до номінального значення і вище;
2. додатногб опору , що вводиться в коло обмотки якоря. Збільшення величини додатного опору зменшує жорсткість механічної характеристики (рис. 5.12 б) і зумовлює зниження швидкості обертання якоря. Цей параметр, за умови плавної зміни, дозволяє також плавно регулювати швидкість від нуля до номінального значення;
3. магнітного потоку Ф. На практиці магнітний потік найчастіше змінюють, регулюючи величину струму обмотки збудження Із за допомогою додатного опору Rp в колі обмотки збудження.
Оскільки при номінальному значенні магнітного потоку магнітна система машини знаходиться в насиченому стані, збільшувати магнітний потік вище номінального значення неефективно. Тому на практиці використовують регулювання швидкості з допомогою магнітного потоку лише в сторону його зменшення і цим, згідно з виразом (5.5), досягають збільшення швидкості від номінального значення і вище. Штучні механічні характеристики двигуна, отримані при Ф < Флоп показані на рис. 5.12 в.
Аналізуючи сказане, можна дійти висновку, що електродвигуни постійного струму є найкращим видом електродвигунів щодо можливості регулювання швидкості. Вони забезпечують три простих у реалізації, ефективних і дешевих способи плавного регулювання швидкості в діапазоні від нуля до номінального значення і вище.
Дата публикования: 2014-11-18; Прочитано: 633 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
