В механических системах, которые принято называть манипуляторами, структурная схема построена таким образом, чтобы рабочие органы (захваты) были бы способны совершать разнообразные механические движения. Целесообразность движений подсказывается практикой перемещения транспортируемого груза и его ориентацией в пространстве. Кинематические цепи таких механических систем могут быть открытыми.
Звенья механизма, к которым приложены движущие силы называют входными или ведущими. Количество ведущих звеньев, как правило, равно числу степеней свободы (подвижностей) механизма. В свою очередь и число обобщенных координат равно числу степеней свободы. Для механизма с жесткими звеньями, у которого n степеней свободы, всегда можно подобрать n обобщенных координат.
У механизма, показанного на рис 2.38, две обобщенные координаты φ, ψ по количеству степеней свободы. Однако это открытая кинематическая цепь, так как со стойкой связано только звено  . В задачах кинематики по определению положений звеньев таких механизмов, а также скоростей и ускорений точек звеньев обычно используют векторный анализ [5].
. В задачах кинематики по определению положений звеньев таких механизмов, а также скоростей и ускорений точек звеньев обычно используют векторный анализ [5].
Определим положение звеньев механизма в полярной системе координат.
 K K
| |
 K K
| |

Рис. 2.38. Векторный анализ для механизма манипулятора с двумя степенями свободы
Положение точки К механизма будет полностью определено радиусом-вектором  и углом α, как показано на рис. 2.38. Обозначим длины звеньев
и углом α, как показано на рис. 2.38. Обозначим длины звеньев  ,
,  и введем единичные векторы
и введем единичные векторы 
 . Очевидно, что существует векторное равенство
. Очевидно, что существует векторное равенство
 (2.68)
(2.68)
Если равенство (2.68) возвести в квадрат, то для модуля радиуса-вектора получим следующее выражение:
 (2.69)
(2.69)
Угловое положение α радиуса-вектора можно определить так:
 (2.70)
(2.70)
Таким образом, положение точки К механизма в полярной системе координат r (φ, ψ), α (φ, ψ) описывается с помощью двух обобщенных координат согласно выражений (2.69), (2.70).
Скорость для точки К есть изменение вектора во времени. Дифференцируя (2.68) получим:
 (2.71)
(2.71)
где  – угловая скорость звена OL,
– угловая скорость звена OL,
 – угловая скорость звена LK.
– угловая скорость звена LK.
Частные производные от радиуса-вектора по обобщенным координатам φ и ψ:

где 
 – единичные векторы перпендикулярные звеньям механизма и направленные в сторону возрастания обобщенных координат (см. рис. 2.38).
– единичные векторы перпендикулярные звеньям механизма и направленные в сторону возрастания обобщенных координат (см. рис. 2.38).
Следовательно, модуль скорости точки К на основании (2.71) будет равен

Таким образом, чтобы определить скорость точки К необходимо иметь четыре независимых переменных V = V (φ, ψ,  ,
,  ).
).
Дифференцируя вектор скорости (2.71) по времени, получим для абсолютного ускорения точки К механизма следующее выражение:
 (2.72)
(2.72)
где  ,
,  – угловые ускорения звеньев, имеющих соответствующие обобщенные координаты.
– угловые ускорения звеньев, имеющих соответствующие обобщенные координаты.
Частные производные от линейной скорости по обобщенной координате определяются следующим образом:
 (2.73)
(2.73)
Частные производные от линейной скорости точки по угловым скоростям будут равны:

 (2.74)
(2.74)
Подставив частные производные (2.73), (2.74) в выражение вектора ускорений (2.72), получим:
 (2.75)
(2.75)
где 
 – единичные векторы, направленные вдоль звеньев (см. рис. 2.38).
– единичные векторы, направленные вдоль звеньев (см. рис. 2.38).
Векторное написание (2.75) имеет физический смысл. Все переменные с единичными векторами  являются касательными ускорениями в относительном движении, а с векторами
являются касательными ускорениями в относительном движении, а с векторами  соответствуют нормальным составляющим относительных ускорений. Первые два члена формулы означают ускорение точки L в относительном движении вокруг точки О.
соответствуют нормальным составляющим относительных ускорений. Первые два члена формулы означают ускорение точки L в относительном движении вокруг точки О.
В некоторых механизмах углы φ, ψ сами зависят от других независимых обобщенных координат. На рис. 2.39 показана структурная схема, в которой присутствуют звенья OL и LK, как показано на рис. 2.38.
Однако ведущими звеньями в таких механизмах являются гидроцилиндры AB и CD. Такие механизмы применяют в экскаваторах, погрузчиках, стогометателях и других машинах.

Рис. 2.39. Структурная схема механизма с ведущими гидроцилиндрами
Независимыми переменными в этих механизмах являются длины 
 . Зависимость между φ = φ (s) была найдена ранее (см. формулу 2.63). Обычно стадии разгона и торможения в гидроцилиндрах много короче, чем движение с постоянной скоростью. Поэтому если принять
. Зависимость между φ = φ (s) была найдена ранее (см. формулу 2.63). Обычно стадии разгона и торможения в гидроцилиндрах много короче, чем движение с постоянной скоростью. Поэтому если принять  то
то  Подставив зависимость s (t)в формулу 2.63, получим зависимости φ(t) и ψ(t). Следует иметь в виду, что
Подставив зависимость s (t)в формулу 2.63, получим зависимости φ(t) и ψ(t). Следует иметь в виду, что  в каждом цилиндре имеет свое значение.
в каждом цилиндре имеет свое значение.
Допустим, что структурная схема (рис. 2.39) принадлежит экскаватору типа «обратная лопата». Тогда звено LK должно принадлежать ковшу, а звено OL рукояти. Механизмы рукояти и ковша каждый имеют независимые обобщенные координаты. На рис. 2.40, a показаны траектории движения точки К ковша при раздельной работе гидроцилиндров АВ и CD.
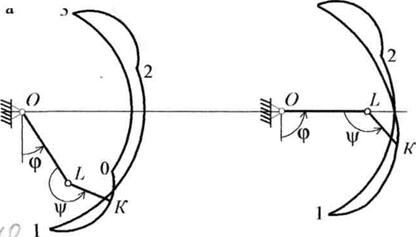
Рис. 2.40. Геометрическое место положений точки К
в системе с двумя степенями свободы:
а – при раздельном движении звеньев; б – при совместном движении по траектории 0-1
Участок траектории 0-1 относится к технологическому процессу копания ковшом. На участке 1-2 осуществляется перенос грунта с помощью рукояти. На участке 2-3 осуществляется просыпь грунта, а на 3-0 возврат ковша к месту копания. На рис. 2.40, б возврат ковша с помощью рукояти и процесс копания совмещены на участке 0-1, так как механическая система обладает двумя независимыми степенями свободы. Остальные операции повторяются.
3. СИЛОВОЙ АНАЛИЗ стержневых
механизмов








