 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Общие сведения. 2.3.1. Обобщенная структура и режимы работы системы ТРН – АД
|
|
2.3.1. Обобщенная структура и режимы работы системы ТРН – АД
Тиристорный регулятор напряжения предназначен для изменения амплитуды напряжения, подводимого к статору без изменения частоты, и используется главным образом для управления пуском (мягкие пускатели) и осуществления ряда других полезных функций.
ТРН находит широкое применение в электроприводах переменного тока, где за счет регулирования напряжения на статоре асинхронных двигателей обеспечиваются регулирование токов и моментов двигателей в переходных режимах, симметрирование токов в фазах, ряд защит двигателя. Одна из них связана с повышением энергетических показателей работы асинхронных электроприводов при малых нагрузках. Тиристорные регуляторы напряжения, выполняющие эту функцию, получили название регуляторов экономичности, или экономайзеров. Возможность энергосбережения этим способом иллюстрируют зависимости тока статора I 1 от прикладываемого к двигателю напряжения U 1 (рис. 2.6) при разных моментах нагрузки M c1 <M c2 <M c3 <М с4. Эти зависимости иногда называют U-образными характеристиками двигателя.
Рис. 2.6. U-образные характеристики асинхронного двигателя
Как видно из графиков, при каждой нагрузке двигателя имеется такое напряжение, при котором потребляемый ток минимален. Снижение тока происходит за счет уменьшения его реактивной составляющей. Вследствии этого обеспечиваются снижение потерь энергии в двигателе, повышение его КПД и коэффициента мощности cosφ.
На рис. 2.7 показаны построенные для двигателя мощностью 30 кВт зависимости КПД, cosφ, относительных тока статора I* и потерь мощности ΔР* в двигателе от относительного напряжения U* при моменте нагрузки М с, равном 20 % от номинального. Из кривых видно, что наилучших значений эти показатели достигают при напряжениях, равных 0,6...0,8 номинального значения.

Рис. 2.7. Зависимости тока статора, потерь мощности, КПД
и коэффициента мощности от напряжения
Требуемый уровень оптимального скольжения может быть реализован в замкнутой по скорости системе ТРН – АД, схема которой приведена на рис. 2.8. На схеме обозначено: ТГ – тахогенератор, ЗП – потенциометр задания требуемой скорости (скольжения) двигателя.
Схема обеспечивает поддержание скорости и тем самым скольжения с определенной точностью при изменениях момента нагрузки Мс. За счет регулирования напряжения возможно примерно в 2,5…3 раза уменьшить потери мощности и повысить cosφ.
До появления доступных преобразователей частоты в нашей стране предпринимались попытки использовать ТРН для регулирования скорости асинхронных двигателей насосов, работающих в продолжительном режиме.
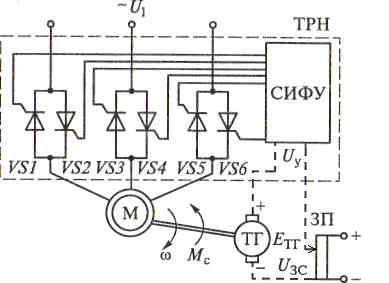
Рис. 2.8. Схема замкнутой системы ТРН –АД
с обратной связью по скорости
Системы электропривода, построенные с использованием ТРН при небольшом диапазоне изменения скорости и момента, обеспечивают хорошую управляемость двигателя (режим пуска, торможения, реверса при использовании исходной структуры преобразователя или части ее силовых элементов). Имеется оптимальное быстродействие при отработке изменяющихся входных сигналов; энергетические показатели (КПД и коэффициент мощности); амплитуда и частота пульсаций момента при вентильном управлении электроприводом; равномерность загрузки отдельных фаз двигателя и др.
С целью увеличения диапазона регулирования скорости в изучаемой системе используются обратные связи. Как правило, наиболее часто применяется отрицательная обратная связь по скорости, осуществляемая с помощью тахогенератора (рис. 2.8).
Вместе с тем тиристорный регулятор напряжения, используемый по основному назначению – плавный пускатель, энергосберегающее устройство при малых нагрузках – очень полезное средство, широко используемое за рубежом, но мало применяемое в России.
2.3.2. Принцип работы ТРН – АД
Одним из возможных способов регулирования координат (скорости) асинхронных двигателей является изменение напряжения на статоре при постоянной частоте питающей сети.
На рис. 2.9 приведена силовая часть схемы электропривода при реализации этого способа с использованием тиристорного регулятора напряжения.


Рис. 2.9. Силовая часть схемы трехфазного ТРН
Тиристорный регулятор состоит из трех пар встречно-параллельно соединенных тиристоров (VS1…VS6), включенных между фазой сети и фазой тиристорного регулятора.
Регулирование напряжения на АД осуществляется изменением угла управления α, т.е. сдвигом во времени управляющих импульсов, подаваемых на управляющие электроды тиристоров. Импульсы подаются на все тиристоры не одновременно, а со сдвигом во времени на третью часть периода частоты сети. Это определяется тем, что управляющий импульс каждого тиристора должен быть сдвинут относительно напряжения той фазы сети, к которой подключен тиристор, на один и тот же угол управления α, а фазные напряжения сети сдвинуты относительно друг друга на 1200.
Изменяя α от нуля до 1500 можно регулировать напряжение на двигателе от полного напряжения сети до нуля.
На рис. 2.10 приведены механические характеристики АД, построенные при напряжениях  ; 0,8; 0,6 и 0,4
; 0,8; 0,6 и 0,4  .
.


Из рис. 2.10 видно, что скорость х.х. ( ) и критическое скольжение (
) и критическое скольжение ( ) при регулировании не изменяются, но резко снижается величина критического момента (
) при регулировании не изменяются, но резко снижается величина критического момента ( ) и модуль жесткости характреистик при уменьшении питающего напряжения (увеличение α). Кроме того, со снижением скорости уменьшается допустимый момент двигателя ω(М доп), вычисляемый по выражению:
) и модуль жесткости характреистик при уменьшении питающего напряжения (увеличение α). Кроме того, со снижением скорости уменьшается допустимый момент двигателя ω(М доп), вычисляемый по выражению:
 .
.
Отсюда следует, что с уменьшением скорости значительно снижается допустимый момент двигателя.
Такой способ оказывается малопригодным для целей регулирования, т.к. по мере уменьшения напряжения снижается перегрузочная способность и мал диапазон изменения скорости.
Энергетические показатели при регулировании скорости асинхронного двигателя изменением напряжения приблизительно такие же, как и при изменении сопротивления в цепи статора. Со снижением скорости (как было указано ранее) уменьшаются КПД и коэффициент мощности (cosφ) установки.
Известно, что работе АД в двигательном режиме соответствует скольжение  в пределах от 1 до 0 (рис. 2.10), причем рабочим режимом является диапазон скоростей, при котором скольжение не превышает . В диапазоне скольжений от до 1 потери в роторе двигателя существенно возрастают, поэтому этот участок механической характеристики двигатель проходит только во время пуска.
в пределах от 1 до 0 (рис. 2.10), причем рабочим режимом является диапазон скоростей, при котором скольжение не превышает . В диапазоне скольжений от до 1 потери в роторе двигателя существенно возрастают, поэтому этот участок механической характеристики двигатель проходит только во время пуска.
Для электропривода с асинхронным короткозамкнутым двигателем во всех режимах работы характеристики могут быть рассчитаны приближенно, при известных технических данных электрической машины.
Электромеханическая характеристика  (рис. 2.11) описывается выражением, полученным из Г-образной схемы замещения АД:
(рис. 2.11) описывается выражением, полученным из Г-образной схемы замещения АД:
 , (2.1)
, (2.1)
где  – приведенный ток фазы ротора;
– приведенный ток фазы ротора;
– напряжение фазы статора;
 – активное сопротивление фазы статора;
– активное сопротивление фазы статора;
 – приведенное активное сопротивление фазы ротора;
– приведенное активное сопротивление фазы ротора;
 – индуктивное сопротивление к.з. фазы двигателя (
– индуктивное сопротивление к.з. фазы двигателя ( – индуктивные сопротивления фазы статора и приведенное фазы ротора);
– индуктивные сопротивления фазы статора и приведенное фазы ротора);
 – скольжение двигателя;
– скольжение двигателя;
 – синхронная скорость (частота) вращения.
– синхронная скорость (частота) вращения.
Как известно электромеханическая характеристика АД это зависимость  , где
, где  .
.
Выражение для механической характеристики получают из баланса мощности в цепи ротора.
Потери мощности в цепи ротора  , выраженные через механические координаты АД, представляют собой разность электромагнитной мощности
, выраженные через механические координаты АД, представляют собой разность электромагнитной мощности  и полезной мощности
и полезной мощности  т.е.:
т.е.:
 . (2.2)
. (2.2)
Потери, выраженные через электрические величины, определяются как
 . (2.3)
. (2.3)
Приравняв потери по 1.2 и 1.3, приходим к выражению:
 . (2.4)
. (2.4)
Замена в (2.4) тока его выражением по (2.1) приводит к следующей формуле:
 .
.
Дата публикования: 2015-10-09; Прочитано: 2592 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
