 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Самолеты вертикального (укороченного) взлета и посадки
|
|
Самолеты вертикального взлета и посадки, летающие на крейсерских (горизонтальных) режимах полета как обычные самолеты, способны, как вертолеты, висеть в воздухе, а также взлетать и садиться вертикально. Для обеспечения режимов ВВП (вертикального взлета и посадки) на таком самолете необходимо иметь специальную силовую установку, обеспечивающую создание подъемной силы, превышающей вес самолета.
Стартовая вертикальная тяговооруженность (отношение подъемной силы, создаваемой двигателями, к весу самолета) современных СВВП находится в пределах 1,05-1,45.
В зависимости от того, каким образом создается подъемная сила на режимах ВВП и сила тяги на маршевых (крейсерских) режимах, можно провести классификацию СВВП (рис. 7.69).
Единая силовая установка (СУ) имеет в своем составе один или несколько подъемно-маршевых двигателей, которые на режимах ВВП создают вертикальную тягу, а на обычных режимах - маршевую тягу. Тяга создается либо воздушным винтом, либо струей газов реактивного двигателя. Изменение направления вектора тяги подъемно-маршевых двигателей может быть конструктивно обеспечено либо поворотом всего двигателя в нужном направлении, например относительно крыла или вместе с крылом, на котором они закреплены, либо за счет изменения направления струи (и вектора тяги) реактивного двигателя.
Принципиальная схема одного из возможных устройств, обеспечивающих изменение направления вектора тяги P с помощью скользящего козырька 1, проиллюстрирована рис. 7.70.
Составная СУ включает в себя две группы двигателей: одна из них - для создания вертикальной тяги на режимах ВВП (подъемные двигатели), другая - для создания маршевой тяги (маршевые двигатели).
Комбинированная СУ также состоит из двух групп двигателей: подъемно-разгонных и подъемно-маршевых, которые (в большей или меньшей мере) участвуют в создании и вертикальной и маршевой тяги.

|
| Рис. 7.69. Классификация СВВП по типу силовой установки |

|
| Рис. 7.70. Выхлопное устройство подъемного двигателя со скользящим козырьком |
Выбор типа силовой установки существенным образом влияет на возможность решения специфических проблем, возникающих при проектировании СВВП, и определяет фактически его концепцию, аэродинамическую и конструктивно-силовую компоновку.
Двигатели 1 (рис. 7.71) создают подъемную силу (P=G /2), уравновешивающую силу тяжести G самолета. На режимах работы вблизи экрана 2 (поверхности ВПП) струи двигателей 3 создают вокруг самолета сложные течения, обусловленные взаимодействием отраженных от экрана газовых струй 4 с воздушными потоками 5, текущими в воздухозаборники двигателей. Форма и интенсивность этих течений на

|
| Рис. 7.71. СВВП с составной силовой установкой и газовоздушные потоки вблизи экрана |
режимах висения вблизи экрана, взаимодействие этих течений с набегающим потоком на режимах ВВП и переходных режимах (от вертикального к горизонтальному движению) зависят от мощности, количества и расположения двигателей (т. е. от компоновки СВВП), что существенным образом влияет на аэродинамические и моментные характеристики СВВП, т. е. определяет его компоновку.
Воздействие газовых струй двигателей вызывает эрозию поверхности аэродрома, степень которой зависит и от типа двигателей, создающих подъемную силу, и от их расположения. Частицы поверхности аэродрома, вымываемые газовыми струями, вместе с высокотемпературными восходящими вверх течениями воздействуют на конструкцию СВВП и, попадая в воздухозаборники двигателей, снижают надежность их работы, ресурс и тяговые характеристики. С целью уменьшения влияния струй на поверхность аэродрома и на самолет часто применяется методика эксплуатации СВВП в режиме укороченного взлета и посадки (УВП), когда дистанции разбега и пробега составляют всего несколько десятков метров. Это позволяет также увеличить весовую отдачу СВВП за счет существенно меньших расходов топлива на режимах взлета и посадки.
Одной из основных проблем, возникающих при разработке СВВП, является обеспечение балансировки, устойчивости и управляемости их на режимах ВВП и переходных режимах, когда поступательная скорость равна нулю либо недостаточно велика для эффективной работы аэродинамических поверхностей, создающих балансирующие и управляющие силы и моменты.
Балансировка, устойчивость и управляемость СВВП на этих режимах обеспечивается либо рассогласованием (модуляцией) тяги двигателей, т.е. увеличением или уменьшением тяги одного двигателя по сравнению с другим, либо с помощью системы струйных рулей, либо комбинацией этих способов.
|
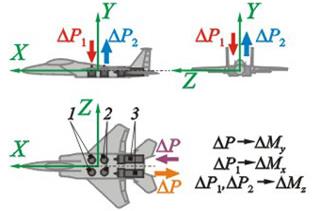
| Рис. 7.72. Управление СВВП рассогласованием тяги двигателей |
Рассогласование ΔP тяги (рис. 7.72) маршевых двигателей 3 приводит к возникновению момента рыскания ΔM y, рассогласование ΔP 1 первой группы подъемных двигателей 1 приводит к возникновению момента крена ΔM x. Рассогласование тяги ΔP 1 и ΔP 2 первой и второй группы подъемных двигателей 2 приводит к возникновению момента тангажа ΔMz.
Струйная система управления СВВП (рис. 7.73) включает в себя несколько удаленных от центра масс самолета на максимально возможное расстояние реактивных сопел (1, 5, 6), к которым с помощью трубопроводов 4 подводится сжатый воздух от компрессора подъемно-маршевого двигателя 3. Конструкция сопла 1 позволяет регулировать расход воздуха и, следовательно, тягу. Конструкция сопел 5 и 6 позволяет изменять не только величину, но и направление силы тяги на противоположное (реверсировать тягу сопла).
При сбалансированном по тангажу (относительно оси Z) самолете (сумма моментов сил тяги сопла 1, подъемного 2 и подъемно-маршевого двигателя 3 относительно центра масс равна нулю) увеличение силы тяги сопла 1 вызовет кабрирующий момент, уменьшение - пикирующий.

|
| Рис. 7.73. Управление системой струйных рулей СВВП с комбинированной силовой установкой |
Показанное на рис. 7.73 направление струй из сопел 5 и 6 приводит к кренению самолета на левое крыло и развороту влево.
Управление режимом работы двигателей и струйными рулями для изменения действующих на самолет сил и моментов на режимах ВВП и переходных режимах летчик осуществляет такими же рычагами управления, как и на обычном самолете, т. е. одновременно с созданием управляющих реактивных сил соответствующим образом отклоняются и аэродинамические рулевые поверхности (руль высоты, элероны и руль направления), которые, однако, не создают управляющих сил на малых (доэволютивных) скоростях поступательного движения самолета. С ростом скорости поступательного движения растут и силы на рулевых поверхностях и с помощью автоматики постепенно выключаются из работы системы струйного управления.
Здесь необходимо отметить, что на малых (доэволютивных) скоростях СВВП не обладает собственной устойчивостью, так как малы аэродинамические силы, способные возвратить его в исходное положение при случайных внешних воздействиях. Поэтому устойчивость СВВП на этих режимах (стабилизация его и поддержание состояния балансировки) обеспечивается включенными в систему управления средствами автоматики, которые, реагируя на угловые перемещения самолета при возмущениях, без вмешательства летчика с помощью струйных рулей возвращают самолет в исходное положение балансировки.
Мы перечислили здесь лишь некоторые проблемы формирования облика СВВП, решение которых уже на ранних стадиях проектирования требует взаимодействия проектировщиков различных специализаций.
К настоящему моменту в мире спроектировано, построено и испытано более 50 типов самолетов вертикального (укороченного) взлета и посадки. В большинстве проектов этих самолетов в основу были положены требования военного применения.
Первый отечественный боевой СВВП был создан в ОКБ им. А.С. Яковлева (см. раздел 20.2).
Преимущества СВВП, о которых мы упоминали в начале раздела 7.4, несомненно приведут к созданию СВВП, способных конкурировать с обычными самолетами при перевозках пассажиров и грузов на короткие и средние расстояния.
Дата публикования: 2015-09-18; Прочитано: 1214 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
