 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Подъемные механизмы
|
|
Домкраты
Домкраты, предназначенные для подъема грузов на небольшую высоту (от 0,15 до 0,7 м), применяют преимущественно при ремонтных и строительно-монтажных работах. Основное отличие домкратов от других грузоподъемных машин состоит в том, что подъем груза домкратами производится без грузозахватных устройств. Домкраты могут быть выполнены переносными и стационарными. По конструкции домкраты разделяют на реечные, винтовые и гидравлические. Привод домкратов может быть ручным и механическим.
Реечные домкраты имеют всегда ручной привод. Их грузоподъемность составляет 0,5–10 т. Они бывают рычажно- и зубчато-реечными. Рассмотрим в качестве примера конструкцию рычажно-реечного домкрата.
Рычажно-реечный домкрат (рис. 7.1) состоит из рейки 2 с упорными зубьями, обоймы 3, скользящей вдоль рейки по направляющим, приводного рычага 5 и системы собачек 4 и 6, расположенных внутри обоймы. Лапа 7, жестко соединенная с обоймой домкрата, является опорой для поднимаемых грузов. При подъеме груза реверсирующий рычаг 8 устанавливают в положение I. При нажатии приводного рычага вниз в зуб рейки упирается большая собачка 6; обойма вместе с грузом поднимается вверх, и малая собачка 4 заходит за очередной зуб. При подъеме приводного рычага малая собачка удерживает груз от самопроизвольного опускания, а большая собачка, скользя по зубу, прижимается к нему пружиной 7. За одно качание рычага обойма поднимается на высоту, равную шагу зуба.
Для опускания груза рычаг 8 устанавливают в положение II небольшим нажатием вниз, в результате чего внешний упор с пружины снимают. При этом малая собачка выходит из зацепления с рейкой и под действием веса груза обойма опускается до упора малой собачки в следующий зуб, а рычаг перемещается вверх, придерживаемый рукой рабочего во избежание удара рейки по малой собачке.

Рис. 7.1. Рычажно-реечный домкрат
Рычажно-реечные домкраты имеют высокий КПД (0,95–0,97). Эти домкраты часто используют для ремонта железнодорожных путей и автомобилей. Недостаток рычажно-реечных домкратов – прерывистость действия и самопроизвольное падение груза вследствие быстрого изнашивания собачек.
Винтовые домкраты могут иметь ручной или электрический привод. Если в рычажно-реечных домкратах каждое перемещение груза по высоте равно шагу зуба рейки, а в зубчато-реечных домкратах – шагу храпового колеса, в винтовых домкратах груз можно устанавливать по высоте с большей точностью. Простейший винтовой домкрат (рис. 7.2) состоит из корпуса 1, винта 2, головки 3, шарнирно соединенной с винтом, гайки 4 и приводной рукоятки 5 с собачкой 6 храпового механизма. При качательных движениях приводной рукоятки храповое колесо поворачивается совместно с винтом, что приводит к выдвижению винта из корпуса.

Рис. 7.2. Винтовой домкрат
Для предотвращения самопроизвольного опускания груза резьбу винтовых домкратов выполняют самотормозящейся (трапецеидальной или упорной). Основным критерием, характеризующим работоспособность винтового домкрата, является износостойкость резьбы. Основными недостатками винтовых домкратов являются низкий КПД и малая скорость опускания груза.
Гидравлические домкраты выполняют с ручным и машинным приводами. Для этих домкратов, как для винтовых, характерны плавность хода и точная установка поднимаемого груза. В отличие от винтовых домкратов гидравлические имеют высокий КПД. По сравнению с реечными и винтовыми гидравлические домкраты имеют значительно большую грузоподъемность, которая составляет до 750 т.
Домкрат с ручным приводом, показанный на рис. 7.3, состоит из гидроцилиндра 2, плунжера 1, ручного поршневого насоса 4 с приводной рукояткой 5 и бачка для масла 6. При качании рукоятки 5 масло из бачка поступает под плунжер, в результате чего плунжер поднимается вместе с грузом. Для опускания груза или плунжера следует повернуть вентиль 3, тогда полость гидроцилиндра будет соединена с бачком и плунжер начнет опускаться под действием собственного веса или груза. Скорость опускания регулируется степенью открытия спускного вентиля.

Рис. 7.3. Схема гидравлического домкрата с ручным приводом
Гидравлические домкраты используют для подьема груза на высоту 0,15–0,7 м. Скорость подъема груза ручными гидравлическими домкратами очень мала (от 0,001 до 0,002 м/с), что является их основным недостатком. Для увеличения скорости плавного подъема крупногабаритных тяжелых грузов применяют несколько гидравлических домкратов, соединенных с одним насосом.
Тали
Таль – грузоподъемное устройство (лебедка), подвешиваемое к балкам или специальным тележкам, перемещающимся по подвесному монорельсовому пути. Таль может иметь ручной, электрический или пневматический привод.
Ручные тали (с ручным приводом) производят подъем груза с помощью цепей, приводимых в движение вручную с помощью приводных звездочек. Грузовая цепь образует полиспаст кратностью 2; 3 и реже 4.
Различают червячные и шестеренные ручные тали.
Червячная таль (рис. 7.4) с пластинчатой грузовой цепью, образующей двукратный полиспаст, имеет верхнюю обойму 6, в которой размещен приводной механизм, и крюковую подвеску 1 с подвижной звездочкой 2, подвешенной на пластинчатой шарнирной цепи 10. Приводной механизм состоит из червяка 9, на котором закреплена приводная звездочка 4 с калиброванной сварной бесконечной цепью 3, и из червячного колеса 7, выполненного литьем со звездочкой 5 или жестко соединенного с ней. Звездочка приводит в движение грузовую пластинчатую цепь, от длины которой зависит высота подъема груза. Червячная передача для увеличения КПД выполнена несамотормозящейся с двухзаходным червяком с углом подъема винтовой линии 15–20°. Поэтому для предотвращения самопроизвольного опускания груза она имеет дисковый грузоупорный тормоз 5. Грузоподъемность червячных талей составляет 0,5–10 т, а КПД – 0,55–0,7.
Шестеренная ручная таль показана на рис. 7.5. Крутящий момент тали от тягового колеса 5 передается на приводной вал с шестерней 3, находящейся в зацеплении с двумя зубчатыми колесами 4, и далее через еще одну зубчатую передачу – на звездочку 2, осуществляющую привод грузовой пластинчатой цепи.

Рис. 7.4. Червячная ручная таль
Подъемный механизм приводится в действие бесконечной калиброванной сварной цепью 7, огибающей тяговое колесо 5. Таль снабжена дисковым грузоупорным тормозом 6, встроенным в тяговое колесо. Грузоподъемность шестеренных талей составляет 0,25–10 т, а КПД – 0,7–0,9.
Электрическая таль (с электрическим приводом). Отличительным признаком электроталей является компактность. Электротали подвешивают к неподвижным опорам (балкам, колоннам, стенам и т. д.) с помощью болтов или крюков или к тележкам, перемещающимся по монорельсовому пути.
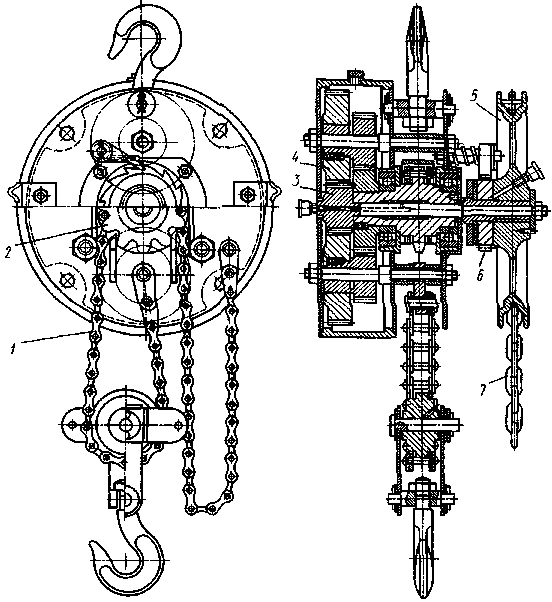
Рис. 7.5. Шестеренная ручная таль
Управление механизмом подъема электротали производят с пола с помощью двухкнопочного поста управления, подвешенного к тали. Токоподвод выполнен в виде гибкого кабеля. Грузоподъемность электроталей составляет 0,1–15 т. Высота и скорость подъема груза соответственно не более 30 м и 0,05–0,15 м/с.
Электротали могут быть использованы в качестве самостоятельных грузоподъемных машин или в качестве механизмов подъема в более сложных машинах (монорельсовых тележках, мостовых однобалочных кранах, настенных консольных кранах и т. д.). Большинство электроталей имеют в качестве гибкого грузового элемента стальной канат и реже сварную или пластинчатую цепь. Конструкции канатных электроталей весьма разнообразны, причем различаются они между собой взаимным расположением барабана и электродвигателя. По этому признаку электротали разделяют с фланцевым двигателем, установленным на одной оси с барабаном, с двигателем, встроенным в барабан, и с параллельным расположением двигателя и барабана.
Электротали с фланцевым двигателем, расположенным на одной оси с барабаном, имеют большую длину; распространения не получили.
Электротали с двигателем, встроенным в барабан, имеют грузоподъемность 0,5; 1; 2; 3,2; 5; 8; 12,5 и 16 т.
Вследствие максимальной компактности талей рекомендуется их зубчатые передачи изготовлять из хромоникелевых, хромистых и других высококачественных легированных сталей, а шестерни выполнять с малым числом зубьев.
В качестве привода в электроталях используют только асинхронные короткозамкнутые двигатели. Если требуется применение двухскоростного механизма подъема, то используют многоскоростные асинхронные двигатели.
Рассмотрим конструкцию передвижной электрической тали. В этих талях механизм подъема подвешен к тележке, перемещающейся по монорельсовому пути. На рис. 7.6 показана электроталь 2, подвешенная к четырехколесной неприводной тележке 1, передвигающейся с помощью приводной тележки 4. Управление талью и приводной тележкой осуществляется с пола при помощи четырехкнопочного порта управления 3.

Рис. 7.6. Электроталь с механизмом передвижения
Пневматические тали используют для работы во взрывоопасной среде, в которой использование электродвигателей не допускается.
Пневматическая таль имеет механизм подъема, установленный на монорельсовой тележке, с помощью которой она перемещается по подвесному монорельсовому пути.
Лебедки
Лебедками называют грузоподъемные машины, в которых в качестве рабочего элемента, навиваемого на барабан или огибающего канатоведущий шкив или звездочку, используют канат или цепь. Лебедки предназначены для подъема и перемещения грузов по горизонтальному или наклонному пути при ремонтных, строительно-монтажных и других работах, а также для механизации транспортирования грузов.
Лебедками также называют механизмы подъема грузоподъемных кранов и подъемников, механизмы изменения вылета или передвижения тележек кранов, если в этих механизмах используют канаты или цепи.
Различают лебедки с ручным или машинным приводом от электродвигателей, двигателей внутреннего сгорания, реже от гидравлических, пневматических и паровых.
Лебедки могут быть выполнены напольными, прикрепленными с помощью болтов к фундаментам, опорным рамам или плитам, либо настенными, прикрепленными к стенам, колоннам и т. д. Узел крепления лебедок с любым типом привода должен быть таким, чтобы обеспечивалась их устойчивость при натяжении каната (или цепей), превышающем в 2 раза номинальное значение.
Лебедки с ручным приводом обычно выполнены барабанными. Они имеют станину в виде двух щитов, между которыми расположен приводной зубчатый механизм и барабан.
Барабанные лебедки с ручным приводом имеют приводную рукоятку с тормозом, гладкий барабан для многослойной навивки каната без канатоукладчика, в основном открытые зубчатые или червячные несамотормозящиеся передачи, подшипники скольжения, смазываемые консистентной смазкой, шестерни с малым числом зубьев (11 – 14) для обеспечения компактности.
Рычажная ручная лебедка (рис. 7.7 ) выполнена без органа навивки каната. Принцип работы ее основан на протягивании каната через тяговый механизм с помощью двух пар зажимов. Лебедка имеет тяговый механизм 2 для каната 3 и телескопический рычаг 1.
Тяговый механизм (рис. 7.7 б) имеет корпус 8, рукоятки переднего 4 и заднего 5 хода, штырь 19, с помощью которого лебедка прикрепляется к анкерному (якорному) устройству, рассчитанному на увеличенное в 2 раза расчетное натяжение рабочего каната, передний 6 и задний 10 захваты, рычаг 7, предназначенный для освобождения каната от зажимов. Каждый захват состоит из двух щек, внутри которых расположены два зажима 9, осуществляющие захват каната, пружин 14, серьги с одним ушком 13 и серьги с двумя ушками 12. Каждая серьга, состоящая из двух пластин, имеет фигурные отверстия в виде полуокружностей, в которые входят фигурные выступы зажимов (сухарей) 9. Зажимы имеют полукруглую канавку для протягиваемого каната. Усилие, зажимающее канат, создается пружинами 14, которые сжимаются между щеками зажимов с одной стороны и правой серьгой соответствующего захвата с другой стороны. При повороте каждой серьги вокруг собственной оси 11 при движении по часовой стрелке вследствие давления серег на фигурные выступы зажимов происходит зажим каната, а при повороте серег против движения часовой стрелки происходит сжатие пружин и освобождение каната. Оба захвата с помощью тяг и рычагов соединены с рукояткой переднего хода.
Для протягивания каната вперед, т. е. справа налево, на рукоятку переднего хода надевают телескопический рычаг и совершают вручную качательные движения. При движении рукоятки против часовой стрелки поводок 17 с помощью шатуна 18 поворачивается по часовой стрелке. Верхняя часть поводка соединена со щеками переднего захвата короткой тягой 16, а нижняя часть поводка – со щеками заднего захвата длинной тягой 15. Поэтому при повороте поводка (по часовой стрелке) передний захват перемещается вправо, причем канат освобождается от захвата, а задний захват движется влево вместе с зажатым канатом. При движении рукоятки переднего хода в обратную сторону (по часовой стрелке) передний захват с канатом подтягивается влево, а задний разжатый захват перемещается вправо. Для освобождения каната от захватов рычат 7 поворачивают против часовой стрелки.
| б) |
| а) |

Рис. 7.7. Рычажная лебедка: а – общий вид; б – тяговый механизм
Лебедки с машинным приводом бывают нереверсивными или реверсивными, фрикционными или с жесткой связью каната и барабана, однобарабанные и двухбарабанные, односкоростные и двухскоростные, с цилиндрическими или конусоидальными барабанами и т. п.
Однобарабанные фрикционные лебедки бывают с приводом от электродвигателя или от двигателей внутреннего сгорания. Барабан с двигателем соединен фрикционной муфтой. Муфта управляется вручную рукояткой управления, сблокированной с тормозом так, что при включении муфты тормоз лебедки размыкается, а при выключении он замыкается. Таким образом, управление лебедкой осуществляется при непрерывно работающем двигателе.
Для опускания грузозахватного приспособления или груза производится растормаживание лебедки при помощи педали. Ввиду повышенной опасности при эксплуатации применение фрикционных лебедок с электрическим приводом для подъема груза правилами Госгортехнадзора запрещено. Поэтому находят применение подъемные лебедки, в которых барабан жестко соединен с двигателем.
Электрические реверсивные однобарабанные лебедки имеют тяговое усилие 4,0; 6,3; 10,0; 12,5; 20,0; 32,0; 50,0 кН.
Электрическая реверсивная однобарабанная лебедка показана на рис. 7.8. Ее используют при строительных и монтажных работах, а также для комплектации подъемников.
Реверсивная однобарабанная лебедка смонтирована на раме 1. Привод осуществляется от асинхронного двигателя с фазным ротором 6. Барабан 2 с редуктором 3 соединен с помощью зубчатой муфты внутри барабана. Двигатель с редуктором соединен упругой разъемой муфтой 5, одна из частей которой (со стороны редуктора) используется в качестве тормозного шкива. Тормоз 4 двухколодочный с короткоходовым магнитом переменного тока. Управление электродвигателем производится контроллером 7. На раме лебедки установлены также пускорегулирующие резисторы 8. Для опускания груза в электрических подъемных лебедках двигатель включается в сторону опускания груза. Если при этом момент от веса груза больше момента от сил трения в передачах лебедки, то двигатель работает в режиме генераторного торможения. Опускание груза реверсированием двигателя обеспечивает безопасность при работе лебедки.

Рис. 7.8. Электрическая реверсивная однобарабанная лебедка
Строительно-монтажные однобарабанные лебедки должны иметь несколько скоростей подъема: малую, скорость при посадке груза и большие скорости при подъеме и опускании груза. Наиболее часто их применяют с двухдвигательным приводом и планетарной муфтой или редуктором.
Для подтягивания железнодорожных вагонов в цехах, для откатки вагонеток и т. п. используют двухбарабанные лебедки. На один барабан навивается грузовая ветвь каната, с другого в это время сматывается другая ветвь каната. Для обеспечения передвижной (нестационарной) двухбарабанной лебедки универсального применения, т. е. возможности изменения соотношения длины прямой и обратной ветвей каната, она должна иметь двадвигателя.
Дата публикования: 2015-07-22; Прочитано: 5373 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
