 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Система захисту. По сигналу «В схему захисту» - відключаються магістралі подачі вихідних реагентів GА , GБ і відбору суміші Gсм
|
|
По сигналу «В схему захисту» - відключаються магістралі подачі вихідних реагентів GА, GБ і відбору суміші Gсм.
Лекція 3. Типова схема процесу переміщення. Трубопровід як об'єкт управління.
3.1. Типова схема процесу переміщення рідини.
3.1.1. Об'єкт управління.
3.1.2. Показник ефективності.
3.1.3. Мета управління.
3.1.4. Аналіз типової схеми.
3.2. Основні параметри трубопроводу як об'єкту управління.
3.3. Схема трубопроводу як об'єкту управління для типової схеми процесу переміщення рідини.
3.4. Математичний опис статики об'єкту.
3.5. Лінеаризовані вирази мат. моделі статики на підставі розкладання в ряд|низку| Тейлора.
3.6. Інформаційна схема об'єкту управління.
3.7. Математичний опис динаміки об'єкту.
3.1. Типова схема процесу переміщення рідини.
3.1.1. Об'єкт управління - схема, приведена на рис.1.

Рис.1.
З|із| ємкості|місткості| 1 насосом 2 по трубопроводу 3 рідина перекачується в ємність 4.
3.1.2. Показник ефективності процесу - витрата Q.
3.1.3. Мета управління процесом Q=Qзд.
3.1.4. Аналіз типової схеми як об'єкту управління:
Основні елементи, що підлягають аналізу, - трубопровід 3 і насос 2.
3.2. Основні параметри трубопроводу як об'єкту управління.
внутрішній діаметр d:
 ,
,
де Q – витрата |, м3/с, v - швидкість потоку, м/с.
· Швидкість потоку v = 0.5 – 2.5м/с.
· Гідравлічний опір трубопроводу:
Dpгс = Dpск + Dpтр + Dpмс
¨ втрати тиску на повідомлення потоку швидкості:

¨ втрати тиску на подолання тертя потокуоб стінки трубопроводу:

де l = f(Re,l) - коефіцієнт тертя.
¨ втрати тиску на подолання місцевих опорів:
Dpмс = åxмс*Dpск,
де xмс -коефіцієнт місцевого опору.
· Опір, що витрачається на підйом рідини на висоту h:
Dpпод = r*g*h
· Додатковий опір :
Dpдоп = p2 – p1
· Повний|цілковитий| опір:

· Потужність, котору| необхідно витратити на перекачування:
N = Dpобщ*Q/(10^3*h),
h= hн*hп*hд,:
де h- повний к.п.д., насоса; hн - к.п.д. насоса; hп - к.п.д. передачі;
hд - к.п.д. двигуна.
3.3. Схема трубопроводу як об'єкту управління
для типової схеми процесу переміщення рідини.

Рис.2.
3.4. Математичний опис статики об'єкту.
1. Матеріальний баланс для трубопроводу (рис.1) на підставі умови нерозривності струменя:
S a *v a = S b *v b (1)
З|із| (1) отримаємо|одержуватимемо|:
v a = S b *v b/ Sa (1б)
Позначимо S b / S a = m (1в)
2. Енергетичний баланс - рівняння Бернуллі:
 (2)
(2)
Підставимо в (2) вираз|вираз| для швидкості потоку в перетині «а»| на підставі|заснуванні| (1б|):
 ( 3 )
( 3 )
Підставимо в (3) замість v b його вираз із співвідношення для об'ємної витрати в перетині «b»:
Qb = v b*Sb;
звідки
v b =Qb / Sb:
 (4).
(4).
Перетворимо вираз|вираз| (4) з урахуванням (1в|) до вигляду|виду|:
 (5).
(5).
Вирішимо вираз (5) відносно Q b:
 (6).
(6).
3.5. Лінеаризовані вирази мат. моделі статики
на підставі розкладання в ряд|низку| Тейлора:
1.Через прирости і приватні похідні:

2.Через прирости і коефіцієнти посилення:

3.6. Інформаційна схема об'єкту управління.
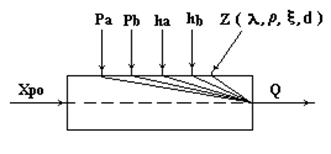
Рис.3.
· Хро - можлива регулююча дія;
· Рa, ha, Pb, hb - можливі контрольовані обурюючі дії;
· Z - можливі неконтрольовані обурюючі|бентежити| дії.
3.7. Математичний опис динаміки об'єкту.
· Структурна схема об'єкту.

Рис.4.
· Рівняння динаміки:
 (1)
(1)
· Рівняння статики:
 (2)
(2)
· Рівняння динаміки в тимчасовій області на основі методу безрозмірних змінних:
 (3)
(3)
· Рівняння динаміки з урахуванням|з урахуванням| запізнювання:
 (5)
(5)
· Передавальна|передаточна| функція для виразу|виразу| (5) матиме вигляд|вид|:
 (6)
(6)
де

 .
.
Лекція 4. Автоматизація відцентрових насосів.
4.1. Основні показники роботи насосів.
4.2. Схема відцентрового насоса.
4.3. Основні характеристики відцентрових насосів.
4.4. Робота насосів на мережу |сіть|.
4.5. Спільна робота насосів при паралельному з'єднанні|сполуці|.
4.6. Спільнаробота насосів при послідовному з'єднанні|сполуці|.
4. 7. Схема регулювання на основі стабілізації Qн =Qс (метод дроселювання).
4.8. Характеристики роботи на мережу|сіть| при регулюванні подачі насоса методом дроселювання.
4.9. Схема регулювання на основі стабілізації Hн =Hс (метод байпасирування |).
4.10. Характеристики роботи на мережу|сіть| при регулюванні подачі насоса методом байпасирування|.
4. 11. Схема регулювання продуктивності насоса на основі стабілізації hн = hс.
4.12. Теоретичні аспекти.
4.13. Характеристики роботи на мережу. |сіть|
4.14. Типова схема автоматизації процесу переміщення рідини відцентровим насосом.
4.1. Основні показники роботи насосів.
· Продуктивність, або подача, Q (м3/ceк) - об'єм рідини, що подається насосом в нагнітальний трубопровід в одиницю часу.
· Натиск Н (м) - питома енергія, що повідомляється насосом одиниці ваги перекачуваної рідини.
 (1)
(1)
де чл.1 - висота підйому рідини в насосі;
чл.2 - різниця п'єзометричних натисків|напорів|;
чл.3 - різниця динамічних натисків|напорів|.
· Корисна потужність Nn - це потужність,що витрачається насосом на повідомлення рідини енергії:
 (2)
(2)
· Потужність на валу насоса Ne – це відношення корисної потужності Nn до к.п.д. насоса:
 (3)
(3)
· Коефіцієнт корисної дії насоса зн
 (4)
(4)
де η v = Q/QТ - об'ємний к.п.д.;
 - гідравлічний к.п.д.
- гідравлічний к.п.д.
η мех - механічний до. п. д.
· Основна мета управління насосами - забезпечити ефективну роботу насоса на мережу.
· Насоси як об'єкти управління класифікуються за принципом дії на:
· відцентрові;
· поршневі.
4.2. Схема відцентрового насоса.

1 - корпус;
2 - робоче колесо;
3 - привід насоса;
4 - лінія всмоктування;
5 – патрубок нагнітання.
Рис.1.
· Принцип дії відцентрових насосів - заснований на створенні|створінні| відцентрових полів тиску|тиснення| при обертанні робочого колеса в рідині.
· Робота схеми.
- У корпусі 1 обертається робоче колесо 2 від приводу 3.
- При цьому залита в корпус рідина також обертається і виникає відцентрове поле тиску|тиснення|
- з максимальним тиском на периферії (тиск Р5) і мінімальним тиском по осі потоку (тиск Р4) тобто створюється Р4 << Р5.
- Тому подача рідини здійснюється через патрубок 4, а нагнітання – через патрубок 5.
4.3. Основні характеристики відцентрових насосів .

Рис.2.
1. Залежність натиску від продуктивності - Н=f1(Q);
2. Залежність потужності на валу насоса від продуктивності - Nе = f2(Q);
3. Залежність к.п.д. насоса від продуктивності: hн=f(Q).
4. Характеристики насоса отримують|одержують|:
¨ в ході спеціального експерименту;
¨ на основі основного рівняння Ейлера для відцентрових машин.
4.4. Робота насосів на мережу |сіть|.

Рис.3.
· Характеристика насоса: Нн =f(Qн);
· Характеристика мережі: Нс =f(Qс );
· Аналітичний вираз|вираз| для натиску|напору| в мережі|сіті|
Нс =Нг + k*Q2 ;
де Нг - геометрична висота подачі;
k*Q2 =hп - втрати натиску в мережі
(·)А- робоча крапка, що забезпечує максимальну продуктивність насоса Q1 при роботі на дану мережу.
4.5. Спільна робота насосів при паралельному з'єднанні|сполуці|.

Рис.4.
· Для побудови|шикування| спільної|загальної| характеристики установки підсумовують продуктивності насосів.
· Паралельне включення|приєднання| насосів використовують:
- для збільшення продуктивності насосної установки;
- коли характеристика мережі|сіті| є досить|достатньо| пологою;
- збільшення натиску|напору| при цьому трохи.
4.6. Спільнаробота насосів при послідовному з'єднанні|сполуці|.

Рис. 5.
· Для побудови|шикування| характеристики установки підсумовують натиски|напори| насосів.
· Послідовне включення|приєднання| насосів використовують:
- для збільшення натиску|напору| насосної установки;
- коли характеристика мережі|сіті| є досить|достатньо| крутою;
- збільшення продуктивності при цьому трохи.
4.7. Схема регулювання на основі стабілізації Qн =Qс
(метод дроселювання).

Рис.6.
· Стабілізація подачі методом дроселювання здійснюється на лінії нагнітання.
· Установка р.О. перед насосом недопустима, оскільки це веде до зниження тиску|тиснення| в насосі і сприяє виникненню кавітації (коливального режиму).
· Вживання|застосування| системи доцільне при  .
.
4.8. Характеристики роботи на мережу|сіть|
при регулюванні подачі насоса методом дроселювання .

Рис.7.
· К.п.д. системи при регулюванні подачі насоса методом дроселювання.
 .
.

· Система буде економічніша, якщо  .
.
4.9. Схема регулювання на основі стабілізації Hн =Hс
(метод байпасирування |).

Рис.8.
· При даному способі регулювання:
Qб - байпасний потік;
Qн - продуктивність насоса;
Qс=Qн-Qб - продуктивність мережі;
Нс=Нн.
· Застосування системи доцільно при  .
.
4.10. Характеристики роботи на мережу|сіть|
при регулюванні подачі насоса методом байпасирування|.

Рис.9.
· К.п.д. системи при регулюванні подачі методом байпасирування |.

 .
.
Система найбільш економічна, якщо  .
.
4.11. Схема регулювання продуктивності насоса
на основі стабілізації hн = hс.
.

Рис.10.
· Регулювання подачі здійснюється шляхом зміни швидкості обертання приводу насоса.
4.12. Теоретичні аспекти.
· При зміні n і збереженні подібності режимів роботи одночасно змінюються і Qн і Нн відповідно до співвідношень:
 (4.1)
(4.1)
· Отже, можна змінити|зраджувати| положення|становище| характеристики насоса, забезпечивши проходження її через задану точку.
4.13. Характеристики роботи на мережу. |сіть|

Рис.11.
Вихідні|початкові| дані для вирішення завдання|задачі|:
· характеристика насоса 1 при частоті n;
· характеристика мережі|сіті| 2;
Постановка завдання|задачі|:
· забезпечити роботу на мережу в робочій точці “С” з параметрами
Qс, Нс и hс=hн.
Решение завдання|задачі|
Знайдемо частоту n1, при якій характеристика Нн=f(Q) пройде через точку С, для чого виконаємо наступні побудови.
· Побудуємо|спорудимо| параболу подібних режимів.
На підставі співвідношень (4.1) можна записати:
 (4.2)
(4.2)
З|із| (4.2).виразимо|виказуватимемо| Н:
 (4.3)
(4.3)
Вираз(4.3) описує параболу подібності 3 на рис.10, яка пересікає характеристику насоса (n) в крапці А з параметрами QА і НА за умови h =const.
· Визначимо частоту n1.
На підставі співвідношень (4.1) можна записати:
 ,
,
звідки при відомих Qс, QА і n отримаємо n1:
 (4.4)
(4.4)
· Розрахуємо по відомих QA і HА к.п.д. насоса:
 (4.5)
(4.5)
· Таким чином, система забезпечує:
 .
.
4.14. Типова схема автоматизації процесу переміщення рідини
відцентровим насосом.

Рис.12.
4.14. Типове вирішення автоматизації процесу переміщення рідини
відцентровим насосом.
Дата публикования: 2014-10-23; Прочитано: 469 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
