 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Расчет маховика
|
|
Полагаем, что кинематический расчет для всех положений механизма проделан и скорости точек звеньев известны. Приводим порядок расчета для строгального станка, схема которого показана на рис. 5.
1. Определяют для каждого положения механизма приведенный к главному валу станка момент сил сопротивления  определенный из условия равенства мощности приведенного момента и мощности силы полезного сопротивления по формуле
определенный из условия равенства мощности приведенного момента и мощности силы полезного сопротивления по формуле

где  – сила сопротивления, Н;
– сила сопротивления, Н;
рс – отрезок плана скоростей, выражающей скорость точки приложения силы Р;
ра – отрезок плана скоростей, выражающий скорость пальца кривошипа, к которому приводят силу;
r01A – радиус кривошипа, м.
Затем в масштабах  и
и  строят график (рис. 17)
строят график (рис. 17)

В тех заданиях, где имеются перебеги ведомого звена, при определении их нужно учесть (см. рис. 17). При этом иногда возникает необходимость дополнительного построения плана скоростей для положения кривошипа на углах  и
и  .
.
(в случае двигателя строят график  .
.
Результаты расчетов следует занести в таблицу.
2. Графическим интегрированием (рис. 17) графика моментов сил строят график работ  в масштабе
в масштабе  , где Н – полюсное расстояние (в случае двигателя строят график
, где Н – полюсное расстояние (в случае двигателя строят график  . Размерность
. Размерность  .
.
3. За период установившегося движения  , то есть
, то есть  . Считаем
. Считаем  , поэтому график
, поэтому график  должен получиться в виде прямой линии. Чтобы получить график , соединим начало координат с точкой К графика .
должен получиться в виде прямой линии. Чтобы получить график , соединим начало координат с точкой К графика .
4. Дифференцируя диаграмму получают прямоугольную диаграмму  в том же масштабе КM (для двигателя дифференцируют диаграмму
в том же масштабе КM (для двигателя дифференцируют диаграмму  и получают диаграмму для ).
и получают диаграмму для ).
5. Вычитая графически из ординат графика ординаты диаграммы , строят график изменения кинетической энергии:

в масштабе KE = KA и Kφ.
6. Определяют для всех положений механизма приведенный к главному звену момент инерции  исходя из условия, что кинетическая энергия звена приведения должна быть равна сумме кинетических энергий всех звеньев машины без маховика.
исходя из условия, что кинетическая энергия звена приведения должна быть равна сумме кинетических энергий всех звеньев машины без маховика.

отсюда 
Результаты расчетов сводят в таблицу с указанием номера положения, величин отрезков из плана скоростей, величин слагаемых и значений приведенного момента инерции без маховика.
Строят график  , повернутый на 90˚ по часовой стрелке (см. рис. 17) в масштабе KJ и Kφ.
, повернутый на 90˚ по часовой стрелке (см. рис. 17) в масштабе KJ и Kφ.
7. Графически исключают параметр φ1 и строят график "энергия – масса"

При построении для каждого положения кривошипа проводят параллельно осям абсцисс линии через соответствующие ординаты графиков  и . Соединяют точки пересечения этих линий.
и . Соединяют точки пересечения этих линий.
8. Из формул (6.2) и (6.3) определяют ω 1min и ω 1max по заданным ω 1СР и δ:
9. Находят углы ψmax и ψmin из формул:

Под углом ψ max проводят крайнюю верхнюю касательную к кривой графика и под углом ψ min проводят к ней нижнюю касательную. В точке пересечения касательных получаем начало координат графика 
10. Расстояние между новыми и старыми осями координат определят величины  и JMX.
и JMX.
Тогда  . Однако при малых значениях δ точка пересечения касательных уходит за пределы чертежа и тогда момент инерции маховика, насаженного на главный вал машины, определяется по формуле:
. Однако при малых значениях δ точка пересечения касательных уходит за пределы чертежа и тогда момент инерции маховика, насаженного на главный вал машины, определяется по формуле:

где BC – отрезок, отсекаемый касательными на оси ординат .
11. Задаваясь из конструктивных соображений диаметром маховика  , (см. рис. 16),
, (см. рис. 16),
можно определить вес обода маховика  .
.
Вес маховика со ступицей и спицами равен  .
.
Чтобы не произошло разрыва маховика от центробежных сил инерции и перенапряжения обода, следует проверить окружную скорость на ободе.
Для чугунных маховиков должно соблюдаться условие:

Если вес маховика получается очень большим, его можно уменьшить, установив маховик на более быстроходный вал, причем кинетическая энергия маховика не должна измениться.
Отсюда 
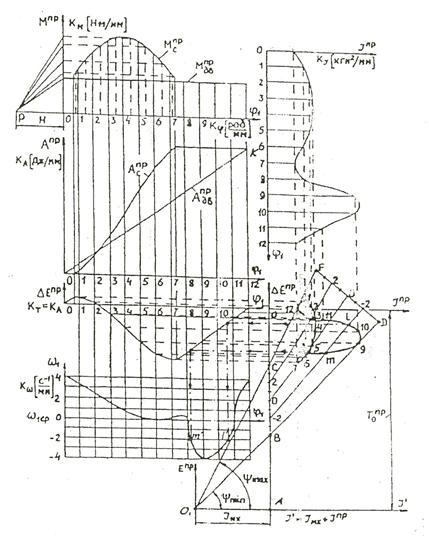
Рис. 17.
12. Строят график изменения угловой скорости главного звена  .
.
Если начало координат графика  находятся в пределах чертежа, то, соединяя соответствующую точку графика с началом координат O 1 и определяя угол ψ 1, находят угловую скорость в i-м положении.
находятся в пределах чертежа, то, соединяя соответствующую точку графика с началом координат O 1 и определяя угол ψ 1, находят угловую скорость в i-м положении.

Если же точка O1 вышла за пределы чертежа, то можно сначала определить кинетическую энергию в начальном положении по формуле, вытекающей из рис. 17.

Знак плюс берется при положении точки С ниже точки О, а знак минус при расположении точки С выше О. Затем для каждого механизма определяются из графика

и находится угловая скорость ω1 по формуле  .
.
График может быть также построен графическим способом с достаточной для практических целей точностью, но с существенно меньшей затратой времени.
С этой целью оба луча, касающихся графика пересекаем двумя произвольными прямыми, например, ВС и FD. Затем каждый из этих отрезков делится на равное число частей и непременно четное, например, на 8. Полученные точки следует пронумеровать аналогично тому, как это показано на рис. 17.
На графике  проводится такое количество параллельных оси абсцисс
проводится такое количество параллельных оси абсцисс  линий на равном друг от друга расстоянии, которое определяется масштабом из того условия, что полученный график будет расположен между линиями 4-4.
линий на равном друг от друга расстоянии, которое определяется масштабом из того условия, что полученный график будет расположен между линиями 4-4.
Соединим, например, точки -2 на отрезках ВС и FD линией, которая пересекает диаграмму в точках l и m.
Перенося эти точки на соответствующее им место на диаграмме  , а затем на одноименную прямую графика
, а затем на одноименную прямую графика  , получим точки l' и m' на линии -2. Получив ряд точек, соединяем их плавной кривой. В тех местах, где поведение кривой неясно, следует увеличить число делений.
, получим точки l' и m' на линии -2. Получив ряд точек, соединяем их плавной кривой. В тех местах, где поведение кривой неясно, следует увеличить число делений.
При построении искомого графика следует иметь в виду, что если лучи на диаграмме перемещаются к касательной с ψmin, то угловая скорость уменьшается, и наоборот, если они движутся к линии с ψmax.
Масштабный коэффициент Кω определяется по формуле

13. Определяют мощность двигателя по формуле 
где  – работа движущих сил за период, Дж
– работа движущих сил за период, Дж
T – время периода, с
η – КПД машины, принимается равным 0,8.
СПИСОК ЛИТЕРАТУРЫ
1. Езерская С.В., Янченко Т.А., Аллилуева Л.А. Аналитическое исследование кинематики плоских рычажных механизмов с применением ЭВМ: Методические указания к выполнению курсового проекта по теории механизмов и машин. - Ижевск: ИМИ, 1989. – 42 с.
2. Андрющенко В.М. Математические таблицы для расчета зубчатых передач. – М.: Машиностроение, 1974. – 440 с.
3. Болотовская Т.П., Болотовский И.А., Смирнов В.Э. Справочник по корригированию зубчатых колес. – М.: Машгиз, 1962. – 215 с.
4. Артоболевский И.И. Теория механизмов и машин. – М.: Наука, 1975. – 639 с.
5. Кореняко А.С. и др. Курсовое проектирование по теории механизмов и машин. – Киев: Вища школа, 1970. – 332 с.
6. Попов С.А. Курсовое проектирование по теории механизмов и механике машин: Учеб. пособие для машиностроит. спец. вузов / Под ред. К.В. Фролова. – М.: Высш. шк., 1986. – 295 с.
7. Фролов К.В., Попов С.А., Мусатов А.К. и др. Теория механизмов и машин. – М.: Высш. шк., 1987. – 496 с.
Дата публикования: 2014-11-04; Прочитано: 2206 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
