 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Кинематическое исследование механизма
|
|
Существует 3 метода кинематического исследования рычажного механизма: графо-аналитический (метод планов), графический (метод кинематических диаграмм), аналитический.
В выбранном масштабе K1 вычерчивается кинематическая схема механизма в нулевом положении (за нулевое положение принимается крайнее положение звеньев механизма в начале рабочего хода).
После этого производится разметка положений всех звеньев механизма. Траекторию конца кривошипа делят на 12 равных частей в направлении вращения ведущего звена. Методом засечек размечают положения остальных звеньев. Если второе крайнее положение ведомого звена не попадает в равномерную разметку, то оно определяется дополнительно.
Для всех положений строятся планы скоростей в условном масштабе K 1 кривошипов и планы ускорений в условном масштабе K 2 кривошипов. Масштабы планов скоростей и ускорений подсчитывают по формулам
 (2.4)
(2.4)
 (2.5)
(2.5)
где ω 1 – угловая скорость ведущего звена.
Для наглядного представления об изменении кинематических параметров рабочего органа механизма в течение периода строятся диаграммы: S=S(t), V=V(t), a=a(t).
Построение диаграмм производится в следующем порядке:
1. На основании полученной разметки траектории точки ведомого звена в прямоугольных координатах строят график S=S(t) в масштабе K s [м/мм].
2. Графически дифференцируя по методу хорд, получают график V=V(t). Масштаб скорости подсчитывается по формуле
 (2.6)
(2.6)
где H1 – полюсное расстояние, выбираемое на чертеже произвольно.
3. Графически дифференцируя график V=V(t) по методу хорд, получают график a=a(t). Масштаб ускорений определяется по формуле
 (2.7)
(2.7)
где H 2 – полюсное расстояние при вторичном дифференцировании.
4. Для сравнения результатов кинематического анализа составляется таблица по следующей форме
| № п/п | Истинная скорость точки ведомого звена, м/с | Истинное ускорение точки ведомого звена, м/с2 | ||||
| По плану скоростей | По диаграмме V=V(t) | Аналити- чески, ЭВМ | По плану ускорений | По диаграмме а=а(t) | Аналити- чески, ЭВМ | |
Пример построения планов скоростей и ускорений для кулисного механизма (рис. 5)
Вычерчиваем механизм в масштабе (М 1:5, или K L = 0,0050 м/мм, рис. 5, а). Строим план скоростей (рис. 5, в) для изображенного положения в условном масштабе одного кривошипа (K 1=1). Построение следует начинать с ведущего звена и первой группы Ассура, присоединенной к нему.
Из произвольно выбранной точки Р, принимаемой за полюс, откладываем отрезок  , изображающий скорость т. А1 кривошипа, которую можно рассматривать как геометрическую сумму переносной вращательной скорости точки A3 кулисы и относительной поступательной скорости точки вдоль кулисы
, изображающий скорость т. А1 кривошипа, которую можно рассматривать как геометрическую сумму переносной вращательной скорости точки A3 кулисы и относительной поступательной скорости точки вдоль кулисы


Из т. а1 плана скоростей проводим прямую параллельно O 2 A, а из полюса Р – прямую, перпендикулярную О2А, и в точке их пересечения ставим букву а3. Отрезок pа 3 изображает в масштабе K v скорость т. A 3 кулисы, а отрезок a 1 a 3 – относительную скорость т. A, вдоль кулисы. Отрезок pb на плане скоростей, соответствующий скорости т. B находится из пропорции
Скорость т. C определяется построением геометрического равенства


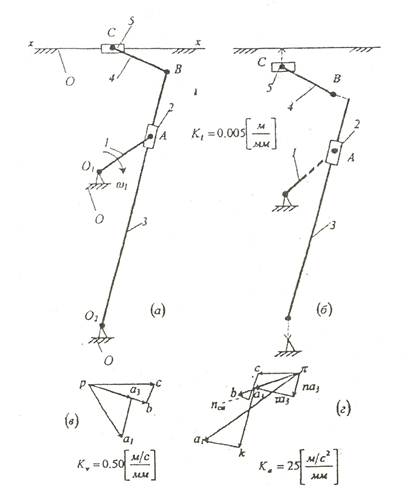

Рис. 5.
Масштаб плана скоростей

 Построим для того же положения план ускорений (рис. 5, г) в условном масштабе двух кривошипов (K 2 = 2). Из произвольно выбранной точки π, принимаемой за полюс плана ускорений, откладываем отрезок
Построим для того же положения план ускорений (рис. 5, г) в условном масштабе двух кривошипов (K 2 = 2). Из произвольно выбранной точки π, принимаемой за полюс плана ускорений, откладываем отрезок  параллельно O 1А, который будет изображать нормальное ускорение т. А1 кривошипа.
параллельно O 1А, который будет изображать нормальное ускорение т. А1 кривошипа.
Так как т. A 1 кривошипа участвует в переносном вращательном движении вместе с кулисой и относительном вдоль кулисы, то абсолютное ускорение т. А1 будет состоять из переносного, относительного и кориолисова ускорений
 (2.8)
(2.8)
Истинное значение  определяется по формуле
определяется по формуле
а величина отрезка в мм, изображающего его на плане ускорений
где pa 3 – отрезок в мм, взятый с плана скоростей, построенного в масштабе K 1 кривошипа;
O2A – отрезок в мм, взятый с плана механизма, вычерченного в масштабе K 1.
Тангенциальная составляющая  известна только по направлению –
известна только по направлению –  . Относительное ускорение
. Относительное ускорение  известно только по направлению – параллельно
известно только по направлению – параллельно  .
.
Истинное значение кориолисова ускорения равно

а величина отрезка, изображающего его на плане ускорений,
Чтобы определить направление кориолисова ускорения, нужно вектор относительной скорости  повернуть на 90˚ в сторону вращения кулисы. В нашем случае относительная скорость
повернуть на 90˚ в сторону вращения кулисы. В нашем случае относительная скорость  направлена от А к O 2, а звено 3 – кулиса вращается по часовой стрелке. Повернув вектор по часовой стрелке, мы и получаем направление
направлена от А к O 2, а звено 3 – кулиса вращается по часовой стрелке. Повернув вектор по часовой стрелке, мы и получаем направление  .
.
В геометрическом равенстве (2.8) неизвестны величины двух ускорений  и
и  , которые и определяются из построения плана ускорений.
, которые и определяются из построения плана ускорений.
Ускорение т. В имеет такое же направление, что  . Его чертежная величина находится из уравнения
. Его чертежная величина находится из уравнения
Величина ускорения т. С определяется графическим решением векторного уравнения

Истинное значение  определяется по формуле
определяется по формуле
величина отрезка, изображающего его на плане ускорений,
где bc – отрезок в мм, взятый с плана скоростей;
ВС – отрезок в мм, взятый с плана механизма.
Тангенциальная составляющая  известна только по направлению
известна только по направлению  , а абсолютное ускорение т. С направлено по горизонтали. Величины этих векторов определяются построением.
, а абсолютное ускорение т. С направлено по горизонтали. Величины этих векторов определяются построением.
Масштаб плана ускорений вычисляем по формуле

Пример графического дифференцирования методом хорд.
Дан график S=S(t) (рис. 6). Разбиваем его на ряд участков, и на каждом из них кривую пути заменяем хордой. Тем самым мы заменяем движение с непрерывно меняющейся скоростью на ряд равномерных движений в пределах каждого участка со скоростями, изменяющимися скачками и равными на каждом участке средним скоростям истинного движения.
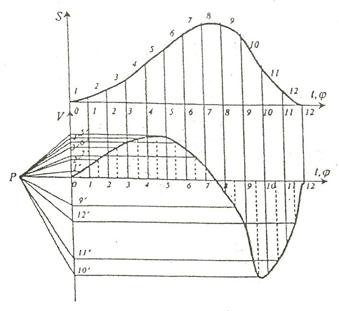
Рис. 6.
Из произвольно взятого на продолжении оси t полюса P проводим ряд лучей P1´, Р2´, P3´ и т.д. параллельно соответствующим хордам. Отрезки 01´, 02´, 03´ и т.д. представят тогда масштабные средние скорости для каждого участка, которые будут совпадать с истинным графиком скорости приблизительно в серединах участков. Поэтому в серединах участков и отмечаем точки с ординатами 01´, 02´, 03´ и т.д., которые соединяем плавной линией. Полученная кривая будет графиком скорости по времени. Масштаб  определяется по формуле (2.6).
определяется по формуле (2.6).
Аналитический метод.
Рассмотрим способ, который можно назвать способом замкнутых векторных контуров, разработанный Зиновьевым В.А.
Исследование начинается с простейшего механизма, включающего ведущее звено, первую присоединенную группу Ассура и стойку. Для этого механизма составляются уравнения, отражающие зависимость линейных и угловых координат звеньев от выбранной обобщенной координаты, за которую принимают угол поворота ведущего звена (эти уравнения называются функциями положений звеньев). Такие уравнения получают путем использования так называемого уравнения замкнутости векторного контура механизма.
Далее составленные уравнения дифференцируют по обобщенной координате. В результате выводят формулы для определения передаточных функций скоростей звеньев (аналогов скоростей). Повторное дифференцирование позволяет получить формулы для определения передаточных функций ускорений (аналогов ускорений).
Затем рассматривается следующий простейший механизм, в котором за ведущее звено принимается одно из звеньев (например, звено 3) первой группы Ассура, а ведомыми являются звенья второй группы. Для этого механизма также записываются функции положения звеньев, в которых за обобщенную координату принимается координата звена 3. Далее производится дифференцирование этих уравнений аналогично вышеизложенному.
Истинные положения звеньев, их скорости и ускорения находят после того, как будут известны зависимости обобщённой координаты и ее производных (обобщенной скорости и обобщенного ускорения) от времени.
Подробно этот способ применительно ко всем заданиям на курсовой проект изложен в [1].
Дата публикования: 2014-11-04; Прочитано: 2271 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
