 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Структурный и кинематический анализ плоских механизмов
|
|
(теоретическая часть)
Одним из основных характерных свойств кинематических пар является количество простейших относительных движений, которых лишаются звенья механизма при соединении их в кинематические пары. Известно, что свободное твердое тело имеет шесть степеней свободы. Произвольное перемещение его в пространстве можно представить как результат сложения шести независимых движений: трех поступательных параллельно осям координат Ox, Oy, Oz и трех вращательных вокруг осей, параллельных этим осям (рисунок 1).
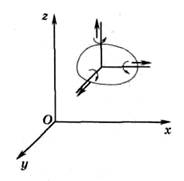
Рисунок 1 – Направления простейших относительных движений тела
Звенья, входящие в плоские механизмы, имеют всего 3 степени свободы (1 вр. + 2 пост.), т.е. на движение механизма в целом наложены 3 общих ограничения. Формула подвижности (структурная формула) плоского механизма записывается в виде:
 , ,
| (1) |
где  – степень подвижности кинематической цепи;
– степень подвижности кинематической цепи;
п – число подвижных звеньев кинематической цепи;
 – число кинематических пар 5-го класса;
– число кинематических пар 5-го класса;
 – число кинематических пар 4-го класса.
– число кинематических пар 4-го класса.
Любой механизм образуется присоединением к ведущему звену любого количества структурных групп.
При образовании механизма с одной степенью подвижности первая группа присоединяется к ведущему звену и стойке. Последующие группы могут присоединяться к любым звеньям полученного механизма таким образом, чтобы звенья группы обладали подвижностью друг относительно друга.
Структурный анализ механизмов (исследование структуры механизмов) предполагает:
Ø определение количества звеньев механизма, числа и класса его кинематических пар;
Ø определение степени подвижности механизма;
Ø разделение механизма на начальные механизмы и структурные группы;
Ø определение класса и порядка структурных групп.
Результатом структурного анализа является определение класса всего механизма, который соответствует наивысшему классу группы Ассура, входящей в состав механизма. Определение класса механизма, согласно классификации Ассура-Артоболевского, возможно, если в результате предварительного структурного анализа установлено выполнение следующих условий:
Ø степень подвижности механизма соответствует количеству ведущих звеньев;
Ø ведущие звенья входят в кинематические пары со стойкой;
Ø в механизме имеются только кинематические пары 5-го класса.
Рекомендуется следующая последовательность отделения структурных групп из кинематической цепи механизма. Отделений групп начинается со звеньев, наиболее удаленных от ведущего звена. В первую очередь отделяются группы Ассура наиболее низкого класса. Следует иметь в виду, что после отделения каждой группы степень подвижности механизма должна оставаться неизменной, а каждое звено и кинематическая пара могут входить только в одну структурную группу. Разделение кинематической цепи механизма на группы Ассура ведется до тех пор, пока не останутся только начальные механизмы (ведущие звенья и стойка).
Кинематический анализ механизма состоит в определении движения звеньев механизма по заданному движению начальных звеньев. Основные задачи кинематического анализа: определение положений звеньев, включая и определение траекторий точек звеньев; определение скоростей и ускорений. При решении этих задач считаются известными законы движения начальных звеньев и кинематическая схема механизма, т. е. структурная схема механизма с указанием размеров, необходимых для кинематического анализа.
Кинематический анализ плоских механизмов графическим методом заключается в определении положений звеньев механизма и построении планов скоростей и ускорений.
Планом скоростей механизма называют чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент. План скоростей для механизма является совокупностью нескольких планов скоростей для отдельных звеньев, у которых полюса планов р являются общей точкой – полюсом плана скоростей механизма.
Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма.
Вопросы
1. Что называется машиной? Какие машины различают в зависимости от их функционального назначения?
2. Дайте определение механизма. В чем сущность его анализа и синтеза?
3. Назовите основные составные части механизма.
4. Как определяется положение всех звеньев механизма относительно неподвижного звена (стойки)?
5. Какое количество простейших относительных движений может совершить свободное твердое тело? Что происходит при соединении звеньев в кинематические пары?
6. Как происходит разделение кинематических пар по классам? Приведите примеры кинематических пар различных классов.
7. Что представляют собой низшие и высшие кинематические пары? Приведите примеры.
8. Каким может быть замыкание элементов звеньев кинематических пар? Приведите примеры.
9. Что называется кинематической цепью? Приведите их классификацию.
10. Получите формулу подвижности кинематической цепи общего вида.
11. Каким образом получается структурная формула плоского механизма?
12. В чем заключается принцип образования механизмов по Асуру?
13. Приведите структурную классификацию плоских механизмов.
14. Что предполагает структурный анализ механизмов? Приведите пример.
15. Назовите основные задачи кинематического анализа механизмов.
Дата публикования: 2015-11-01; Прочитано: 899 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
