 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Измерительные схемы астатического уравновешивания
|
|
При статическом уравновешивании для получения сигнала I на выходе схемы необходимо на входе цепи K поддерживать рассогласование D F=FX—FY. В измерительных цепях с астатическим уравновешиванием на выходе цепи K включают электродвигатель как интегрирующее звено, который формирует сигнал j (рис 2.8), используемый, с одной стороны, в качестве эквивалента измеряемого сигнала X, а с другой – для формирования через обратный преобразователь сигнала FY.
Поскольку двигатель функционирует до тех пор, пока рассогласование не станет равным нулю, то в цепях с астатическим уравновешиванием в установившемся режиме D F=FX-FY =0. Следовательно, наличие двигателя как интегрирующего звена обеспечивает астатичность системы по отношению к рассогласованию D F. Если в измерительную цепь включить последовательно два электродвигателя, то измерительная цепь будет астатичной по отношению к d(D F)/d t. Однако, в этом случае без специальных мер не удается обеспечить устойчивость системы. Наличие двигателя в измерительной цепи можно трактовать как наличие запоминающего устройства. Дело в том, что после отработки сигнала D F до D F = 0 двигатель останавливается, и положение его ротора соответствует выходному параметру j. Это положение будет сохраняться до тех пор, пока опять не появится сигнал D F.
 На рис.2.8 показаны примеры двигателя D (рис.2.8,а), включенного в схему реохорда R и реверсивного счетчика РС (рис.2.8, в), исполняющего роль интегратора (запоминающего устройства) и включенного на вход преобразователя код-аналог. Если на вход двигателя поступают прямоугольные сигналы U вх (рис.2.8,б), угол поворота ротора двигателя j и напряжение U вых, снимаемое с реохорда, будут являться интегралами от входного напряжения. Аналогично этому, если на вход реверсивного счетчика поступают импульсные единичные сигналы (рис.2.8,г), то на выходе счетчика получим результат суммирования (интегрирования) в виде числа j и, если выход счетчика замкнуть на преобразователь код-аналог, то получим сигнал U вых.
На рис.2.8 показаны примеры двигателя D (рис.2.8,а), включенного в схему реохорда R и реверсивного счетчика РС (рис.2.8, в), исполняющего роль интегратора (запоминающего устройства) и включенного на вход преобразователя код-аналог. Если на вход двигателя поступают прямоугольные сигналы U вх (рис.2.8,б), угол поворота ротора двигателя j и напряжение U вых, снимаемое с реохорда, будут являться интегралами от входного напряжения. Аналогично этому, если на вход реверсивного счетчика поступают импульсные единичные сигналы (рис.2.8,г), то на выходе счетчика получим результат суммирования (интегрирования) в виде числа j и, если выход счетчика замкнуть на преобразователь код-аналог, то получим сигнал U вых.
Заметим, что если реверсивный счетчик и преобразователь код-аналог выполнены на микросхемах, то быстродействие цифрового элемента на несколько порядков выше быстродействия элемента с электродвигателем.
В качестве устройств сравнения сигналов FX и FY применяют делители тока и напряжения, мостовые схемы, механические рычаги, дифференциалы, дифференциальные схемы и т.д. На рис.2.9 показаны примеры самоуравновешивающихся мостов на сопротивлениях (рис.2.9,а) и емкостях (рис.2.9,б).
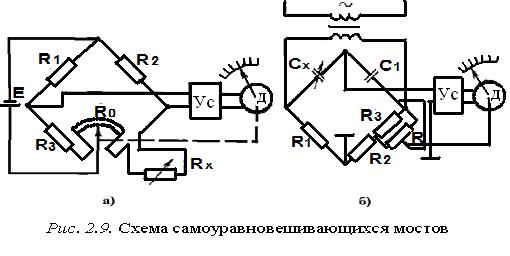
В первом случае это может быть схема термометра сопротивления (RX – терморезистор, преобразующий поток теплоты в изменение электрического сопротивления и являющийся первичным преобразователем ПП), либо схема любого другого прибора, в котором измеряемая величина X преобразована в RX (тензорезисторы, реостатные датчики и т. д.).
Мостовая схема с конденсаторами (см. рис.2.9,б) может относиться к емкостному топливомеру (CX – емкостный датчик топливомера), измерителю плотности, влажности, малых перемещений и вообще к приборам, в которых измеряемая неэлектрическая величина преобразуется в изменение емкости конденсатора.
Погрешности измерительных цепей астатического уравновешивания складываются из следующих составляющих: зоны нечувствительности двигателя DТР и дрейфа нуля D K в цепи K и Db в цепи b. Эти погрешности являются аддитивными и случайными. Среди мультипликативных погрешностей следует рассматривать только погрешность gb цепи b. В цепи K мультипликативная погрешность отсутствует, поскольку двигатель отрабатывает рассогласование до DТР+D K при различных значениях коэффициента K. Поэтому уравнение рассогласования запишется в виде
 .
.
Для цепи b можно написать уравнение преобразования
 .
.
Подставляя, найдем

или, обозначая g=(FX─ b0j)/ FX – результирующую относительную погрешность и пользуясь тем, что FX»b0j, можем написать
 .
.
Если воспользоваться тем, что отдельные составляющие погрешностей некоррелированы. то получим для средней квадратичной погрешности
 .
.
В измерительных цепях астатического уравновешивания вместо двух три аддитивные погрешности и только одна мультипликативная. Поэтому здесь превалирующими оказываются аддитивные погрешности, которые при малых значениях измеряемой величины, оставаясь неизменными, ограничивают диапазон измеряемых величин. Возможности уменьшения аддитивных погрешностей за счет увеличения глубины уравновешивания (b K ®¥) ограничены возможностью нарушения устойчивости системы.
2.4.6 Измерительные схемы развертывающего уравновешивания
Сущность измерительных цепей развертывающего уравновешивания заключается в последовательном обзоре всех возможных состояний по определенной программе. Характерным примером цепи развертывающего уравновешивания является радиолокатор с круговым обзором цели. Если необходимо измерить азимут цели, например, летящего самолета, то непрерывно вращают антенну радиолокатора, последовательно осматривая все возможные положения цели в диапазоне от 0 до 360°.
В качестве примера рассмотрим схему измерения сопротивления RX посредством моста RX, R 2, R 3, R 4 (рис.2.10), два плеча которого R 3
и R4 выполнены в виде кругового потенциометра. Движок потенциометра вращается двигателем Д с равномерной скоростью. На оси двигателя на рычаге укреплена лампа Л, которая зажигается в момент равновесия моста, т. е. когда выполняется условие RXR 4= R 2 R 3. Сигнал на лампу поступает от реле Р, которое срабатывает тогда, когда вход усилителя Ус обесточивается, т.е. когда наступает равновесие моста. При зажигании лампы Л освещается то деление шкалы, которое соответствует измеряемому сопротивлению RX.
Структурная схема измерительной цепи развертывающего урав-новешивания показана на рис.2.10.
Эта схема отличается от предыдущих структурных схем отсутствием замкнутого контура. Сигнал на вход обратного преобразователя ОП поступает от генератора Гj, который задает программу изменения j(t). Сигнал рассогласования D F=FX─FY поступает на преобразователь неравновесия ПН и усилитель Ус и далее на формирователь Ф. В формирователе в момент равновесия образуется сигнал управления ключом Кл, который пропускает на выход значение jX, соответствующее моменту равновесия.
Измерительные цепи развертывающего уравновешивания имеют хорошее быстродействие. В этих цепях можно выбирать большое значение глубины уравновешивания b K, не опасаясь возникновения неустойчивости. Измерения осуществляются в дискретные моменты времени, т.е. в моменты равновесия, поэтому если измеряемая величина меняется с большой скоростью, то могут возникнуть трудности в получении точных результатов измерения. В цифровых системах измерения, принцип развертывающего уравновешивания позволяет получить большое быстродействие, достаточное для измерения многих быстропротекающих процессов.
Дата публикования: 2015-10-09; Прочитано: 750 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
