 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Типовая математическая схема взаимодействия элементов сложной системы
|
|
Пусть модель сложной системы S после введения всех необходимых эквивалентов имеет элементы C 1,..., CN. С достаточной общностью можно предположить, что любой сигнал, циркулирующий между элементами, описывается при помощи некоторого набора характеристик. Поэтому любое входное воздействие в ранее рассматриваемых математических схемах интерпретируется как вектор  , компоненты которого
, компоненты которого 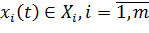 , зависят от времени и называются элементарными сигналами. Выходные реакции элементов аналогично описываются вектор-функцией времени
, зависят от времени и называются элементарными сигналами. Выходные реакции элементов аналогично описываются вектор-функцией времени 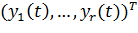 и состоят из набора элементарных сигналов
и состоят из набора элементарных сигналов  .
.
Для описания математической схемы сопряжения рассмотрим ряд предположений, выполнение которых обеспечивает строгую формализацию описываемых процессов в рамках излагаемого подхода. Эти предположения как опираются на ранее сформулированные принципы описания информационного взаимодействия, так и содержат в себе ряд новых.
Π. 1. Входное воздействие для любого элемента  обозначим вектором
обозначим вектором 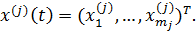 Выходное воздействие определим вектором
Выходное воздействие определим вектором 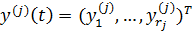 . В общем случае вход любого элемента Сj состоит из набора тj входных контактов, обозначаемых как
. В общем случае вход любого элемента Сj состоит из набора тj входных контактов, обозначаемых как  . Аналогично выход элемента Сj состоит из набора rj, выходных контактов
. Аналогично выход элемента Сj состоит из набора rj, выходных контактов  . Контакт
. Контакт  выделен для приема только i -го элементарного сигнала
выделен для приема только i -го элементарного сигнала  , а контакт
, а контакт  выделен только для выдачи элементарного сигнала
выделен только для выдачи элементарного сигнала  .
.
|
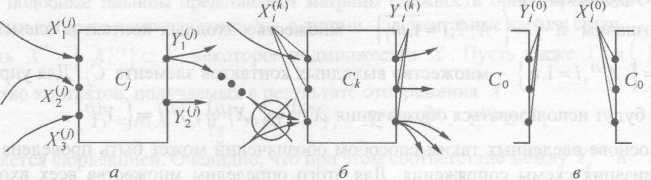
| Рисунок 8.5 – Схемы подключения элементарных каналов связи |
Элементарные сигналы передаются в модели системы по элементарным каналам связи (рисунок 9.5, а и б). Если в реальной системе физические каналы связи являются групповыми, передающими одновременно достаточно разнородную информацию, то здесь для каждого элементарного выходного сигнала , выдаваемого контактом , выделен фиксированный элементарный канал связи. Элементарный сигнал, выдаваемый данным выходным контактом, передается некоторому входному контакту другого (или того же) элемента лишь в том случае, когда в системе существует элементарный канал, соединяющий упомянутые контакты.
В итоге можно сформулировать следующий принцип: для описания процесса передачи информации в модели вводится сеть элементарных каналов связи, каждый из которых соединяет свои выходной и входной контакты элементов и предназначен для своего элементарного сигнала, отображающего передачу некоторой информационной составляющей (сообщения) реально действующего канала связи.
П. 2. Внешняя среда в модели представляется в виде дополнительного элемента С0, изображаемого в виде развернутого прямоугольника (рисунок 8.5, в), вход которого содержит контакты  , а выход – контакты
, а выход – контакты  . Сигнал, выдаваемый из системы во внешнюю среду
. Сигнал, выдаваемый из системы во внешнюю среду  , состоит из совокупности элементарных сигналов, где каждый сигнал
, состоит из совокупности элементарных сигналов, где каждый сигнал  принимается контактом
принимается контактом  . Сигнал, поступающий из внешней среды, представляется вектором
. Сигнал, поступающий из внешней среды, представляется вектором  , состоящим из своей совокупности элементарных сигналов, причем элементарный сигнал
, состоящим из своей совокупности элементарных сигналов, причем элементарный сигнал  выдается контактом
выдается контактом  .
.
П.3. При построении модели сопряжения всех элементов со всеми необходимо ввести ряд ограничений естественного характера, которые должны быть направлены на исключение возникновения неоднозначности при приеме информации и дублирования при ее выдаче.
В связи с этим вводится следующее основополагающее предположение: к входному контакту любого элемента подключается не более чем один элементарный канал; к выходному контакту любого элемента может быть подключено любое конечное число элементарных каналов, при условии, что к входу одного и того же элемента системы направляется не более чем один из этих элементарных каналов связи.
Таким образом, при составлении математической схемы сопряжения элементов необходимо, чтобы идеальные каналы связи между ними не выходили за рамки высказанных предположений.
Обозначим  – множество входных контактов элемента Сj, а
– множество входных контактов элемента Сj, а  – множество выходных контактов элемента Сj. Для упрощения записи будут использоваться обозначения
– множество выходных контактов элемента Сj. Для упрощения записи будут использоваться обозначения  .
.
На основе введенных таким способом обозначений может быть проведена полная формализация схемы сопряжения. Для этого определим множества всех входных и выходных контактов элементов С 0, С 1,...,С N:
В силу третьего предположения существует однозначное отображение вида  т. е. оператор, который любому входному контакту
т. е. оператор, который любому входному контакту  ставит в соответствие соединенный с ним выходной контакт
ставит в соответствие соединенный с ним выходной контакт
Если в системе к данному контакту не подключен элементарный канал связи, то оператор R считается не определенным на этом элементе.
Математической схемой сопряжения элементов в системе S называется совокупность  , а оператор R называется оператором сопряжения.
, а оператор R называется оператором сопряжения.
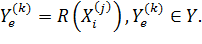
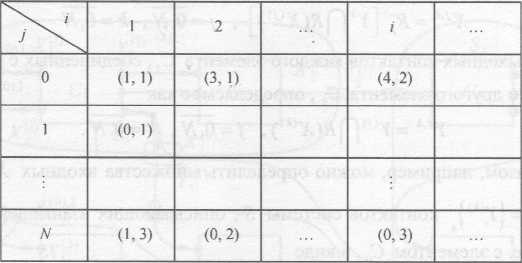
В программных продуктах, реализующих описание взаимодействия элементов системы, оператор сопряжения может задаваться в виде таблицы, форма которой показана на рисунке 9.6. В ней на пересечении строк с номерами элементов С. и столбцов с номерами входных контактов располагается пара чисел (k,е), указывающих номер элемента Сk и, соответственно, выходного контакта  , с которым соединен .
, с которым соединен .
|
| Рисунок 9.6 – Форма таблицы задания оператора сопряжения |
Другой способ задания оператора R заключается в нумерации столбцов и строк двойными номерами соответственно (j, i) и (k,е); на пересечении столбцов и строк размещается 1, если и соединены между собой, и 0 в противном случае. Фактически подобные таблицы представляют матрицы смежности ориентированного графа, вершинами которого являются контакты, а дугами – элементарные каналы связи.
Пусть  некоторое подмножество X. Пусть также
некоторое подмножество X. Пусть также  – множество контактов, получаемых в результате отображения X *
– множество контактов, получаемых в результате отображения X *

т. е. является сюръекцией. Очевидно, что при этом соответствие между и не является в общем случае взаимно однозначным.
Рассмотрим теперь сужение оператора R на множестве, т. е. оператор Rj, определенный только для некоторого элемента  . Этот оператор каждому входному контакту ставит в соответствие выходной контакт некоторого элемента Сk. В таблице рисунка 8.8 оператор Rj представляет строку с номером j. Множество контактов, порождаемых отображением Rj, обозначим
. Этот оператор каждому входному контакту ставит в соответствие выходной контакт некоторого элемента Сk. В таблице рисунка 8.8 оператор Rj представляет строку с номером j. Множество контактов, порождаемых отображением Rj, обозначим

В силу третьего предположения, запрещающего подключение к входному контакту двух и более элементарных каналов связи, оператор Rj является взаимно однозначным. Это говорит о том, что существует однозначный обратный оператор  сопоставляющий любому контакту
сопоставляющий любому контакту
 соответствующий контакт
соответствующий контакт  .
.
Схема сопряжения <X, Y, R> содержит исчерпывающие сведения о модели взаимодействия и взаимной адресации сообщений элементов сложной системы. Такая схема называется одноуровневой в том смысле, что она определяет прямое сопряжение элементов без учета их объединения в подсистемы или модули.
Для дальнейшего изложения удобно ввести ряд частных характеристик схемы сопряжения. К ним относятся множество входных контактов для каждого элемента Cj, соединенных с выходными контактами любого другого элемента Сk, определяемое как

| (9.1) |
и множество выходных контактов каждого элемента Сj, соединенных с входными контактами любого другого элемента Сk, определяемое как

| (9.2) |
Таким образом, например, можно определить множества входных  и выходных
и выходных  контактов системы S, описывающих взаимодействие с внешней средой, т. е. с элементом С0, в виде
контактов системы S, описывающих взаимодействие с внешней средой, т. е. с элементом С0, в виде
| (9.3) |
При работе с универсальными имитационными моделями, реализованными на языках высокого уровня, а также со специализированными инструментальными средствами моделирования часто возникает необходимость автоматизированного перехода от одноуровневой схемы сопряжения к многоуровневой. Такая схема должна обеспечить внешнее сопряжение выделяемых подсистем и внутреннее сопряжение элементов внутри каждой подсистемы. Подобный переход в рамках рассмотренных принципов построения математической схемы сопряжения осуществляется следующим образом.
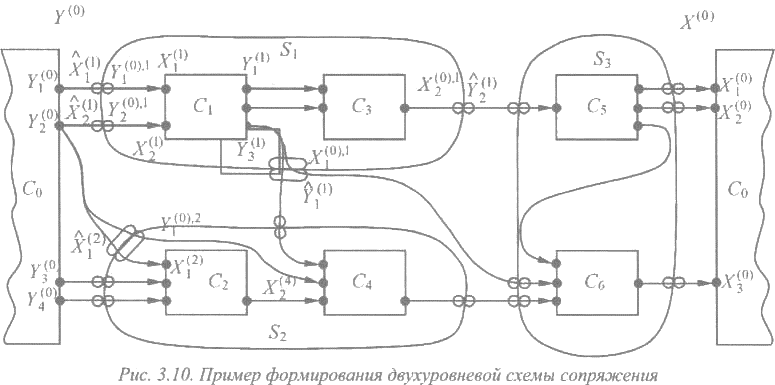
Пусть теперь сложная система расчленена на некоторое число подсистем Sμ,  содержащих каждая не менее чем по одному элементу. Фактически это означает, что задается список подсистем и списки элементов исходной схемы, принадлежащих каждой из подсистем. Иллюстративный пример объединения элементов в подсистемы представлен на рисунке 9.7.
содержащих каждая не менее чем по одному элементу. Фактически это означает, что задается список подсистем и списки элементов исходной схемы, принадлежащих каждой из подсистем. Иллюстративный пример объединения элементов в подсистемы представлен на рисунке 9.7.
Исходя из общих требований к схеме сопряжения подсистемы Sμ,  как новые элементы должны иметь свой набор входных и выходных контактов, соединенных элементарными каналами связи. Подобная сеть должна, с одной стороны, учитывать связи между исходными элементами в одноуровневой схеме и, с другой стороны, не должна быть избыточной, т. е. отражать только связи введенных подсистем. Для решения этой задачи предлагается следующий механизм.
как новые элементы должны иметь свой набор входных и выходных контактов, соединенных элементарными каналами связи. Подобная сеть должна, с одной стороны, учитывать связи между исходными элементами в одноуровневой схеме и, с другой стороны, не должна быть избыточной, т. е. отражать только связи введенных подсистем. Для решения этой задачи предлагается следующий механизм.
Вводятся так называемые фиктивные двойные контакты на границах подсистем. На рисунке 8.7 они представлены светлыми кружками и эллипсами. Возможно два типа контактов. При выходе элементарного канала связи из подсистемы образуется двойной контакт, обозначаемый парой  . На рисунке 8.7 примером такого двойного контакта является
. На рисунке 8.7 примером такого двойного контакта является  Обозначение
Обозначение  определяет, что данный контакт является входным контактом внешней среды, выделяемой по новой схеме на границе подсистемы Sμ. Обозначение
определяет, что данный контакт является входным контактом внешней среды, выделяемой по новой схеме на границе подсистемы Sμ. Обозначение  определяет, что одновременно вводится выходной контакт образуемой подсистемы Sμ. При входе элементарного канала связи в подсистему образуется другой тип фиктивных двойных контактов, обозначаемых как .
определяет, что одновременно вводится выходной контакт образуемой подсистемы Sμ. При входе элементарного канала связи в подсистему образуется другой тип фиктивных двойных контактов, обозначаемых как .
На рисунке 9.7 примером такого контакта является  и др. Обозначение
и др. Обозначение  определяет, что на границе подсистемы вводится входной контакт, а обозначение
определяет, что на границе подсистемы вводится входной контакт, а обозначение  определяет, что одновременно образуется выходной контакт внешней среды, выделяемый теперь по отношению к подсистеме Sμ.
определяет, что одновременно образуется выходной контакт внешней среды, выделяемый теперь по отношению к подсистеме Sμ.
|
| Рисунок 9.7 – Пример формирования двухуровневой схемы сопряжения |
С математической точки зрения процесс образования двойных контактов на границах подсистем можно строго определить следующим образом. Введем с учетом (9.1) – (9.3) множество выходных контактов элементов подсистемы  , которые соединены элементарными каналами связи со всеми остальными элементами, находящимися вне подсистемы
, которые соединены элементарными каналами связи со всеми остальными элементами, находящимися вне подсистемы  , включая и С0
, включая и С0
 . .
| (9.4) |
Заметим, что при таком определении  (в силу свойства идемпотентности операции объединения множеств) исключается дублирование контактов
(в силу свойства идемпотентности операции объединения множеств) исключается дублирование контактов  . Если отбирать их чисто механически, то они могли бы быть включены в несколько раз по числу внешних (вне подсистемы Sμ) объектов, с которыми связан . В системе, показанной на рисунке 9.7, подобным контактом является
. Если отбирать их чисто механически, то они могли бы быть включены в несколько раз по числу внешних (вне подсистемы Sμ) объектов, с которыми связан . В системе, показанной на рисунке 9.7, подобным контактом является  . Очевидно, что на границе подсистемы достаточно иметь только один двойной контакт [он помечен как
. Очевидно, что на границе подсистемы достаточно иметь только один двойной контакт [он помечен как 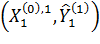 ], независимо от числа подключенных к . Тем самым, при реализации правила (8.4) роль распределителя информации, передаваемой из подсистемы, автоматически делегируется от к .
], независимо от числа подключенных к . Тем самым, при реализации правила (8.4) роль распределителя информации, передаваемой из подсистемы, автоматически делегируется от к .
После задания множества для каждого  введем два оператора
введем два оператора

| (9.5) |
Операторы  и
и  задаются таблицами нумерации двойных контактов первого рода, в которых для каждой комбинации номеров (j, е) контактов определены номера i порождаемых двойных контактов (рисунок 9.8 для подсистемы 51,). Для дальнейшего отметим, что операторы и описывают взаимно однозначные соответствия, так как существуют однозначные обратные операторы
задаются таблицами нумерации двойных контактов первого рода, в которых для каждой комбинации номеров (j, е) контактов определены номера i порождаемых двойных контактов (рисунок 9.8 для подсистемы 51,). Для дальнейшего отметим, что операторы и описывают взаимно однозначные соответствия, так как существуют однозначные обратные операторы  .
.
|
| Рисунок 9.8 – Таблицы для операторов формирования двойных контактов (подсистемы S1 и S2 на pucунке 9.7) |
Введем теперь с учетом (9.1) – (9.4) множество входных контактов элементов подсистемы , которые соединены элементарными каналами связи с выходными контактами всех элементов , находящихся вне подсистемы, включая и внешнюю среду С0:
 . .
| (9.6) |
В множество  входят только различные контакты
входят только различные контакты  , однако не для каждого из них необходим свой двойной контакт
, однако не для каждого из них необходим свой двойной контакт  Бывают случаи, когда различные двойные контакты связаны с одним и тем же выходным контактом другого элемента вне подсистемы. Поэтому в данных случаях на границе подсистемы достаточно иметь один двойной контакт второго рода (на рисунке 9.7 это контакт
Бывают случаи, когда различные двойные контакты связаны с одним и тем же выходным контактом другого элемента вне подсистемы. Поэтому в данных случаях на границе подсистемы достаточно иметь один двойной контакт второго рода (на рисунке 9.7 это контакт  подсистемы S µ), определяемый для подмножества контактов
подсистемы S µ), определяемый для подмножества контактов  элементов S µ, имеющих совпадающие
элементов S µ, имеющих совпадающие  вне подсистемы. В примере на рисунке 9.7 – это подмножество
вне подсистемы. В примере на рисунке 9.7 – это подмножество  , контакты которого соединены с общим выходным контактом внешней среды
, контакты которого соединены с общим выходным контактом внешней среды  . Для каждого такого подмножества вводятся операторы
. Для каждого такого подмножества вводятся операторы
 . .
| (9.7) |
Эти операторы задаются таблицей нумерации фиктивных двойных контактов второго рода (на рисунке 8.8 пример заполнения таблицы для подсистемы S2). Соответствия, описываемые операторами  и
и  не являются взаимно однозначными и строго обратных операторов не существует. Тем не менее, для данного фиктивного контакта (
не являются взаимно однозначными и строго обратных операторов не существует. Тем не менее, для данного фиктивного контакта ( ) можно выбрать произвольно один из порождающих его контактов
) можно выбрать произвольно один из порождающих его контактов  , например с минимальными номерами j, е, и ввести его как значение
, например с минимальными номерами j, е, и ввести его как значение 
Таким образом, нами определены операторы, обеспечивающие задание двойных контактов первого и второго рода. Это позволяет перейти к формализованному описанию двухуровневой схемы сопряжения.
Для этого рассмотрим сначала каждую подсистему Sμ, как самостоятельную сложную систему. Ее элементы по-прежнему характеризуются наборами контактов
 .
.
Внешняя среда для S µ описывается множествами контактов

| (9.8) |
Тогда на множествах

можно ввести оператор

который называется внутренним оператором сопряжения подсистемы S µ. Он задается на основе тех же способов табличного описания, что и ранее рассмотренный оператор одноуровневой схемы сопряжения.
Рассмотрим теперь подсистемы Sμ, как элементы системы S. С этой точки зрения каждая подсистема S µ характеризуется множествами входных и выходных контактов

| (9.9) |
Элемент С0 в этом случае сохраняет исходное описание множеств своих контактов, для которых можно теперь обозначить  . Тогда может быть получена схема сопряжения подсистем в системе S на основе определения множеств
. Тогда может быть получена схема сопряжения подсистем в системе S на основе определения множеств
и отображения вида
 .
.
Совокупность внутренних схем сопряжения подсистем и схемы сопряжения между подсистемами

называется двухуровневой схемой сопряжения, которая является полностью эквивалентной исходной одноуровневой схеме. Совершенно очевидно, что аналогичным образом может быть построена схема сопряжения с любым количеством уровней.
Изложенный подход при его реализации в программных продуктах, предназначенных для моделирования сложных систем, позволяет реализовать автоматизированную перестройку и отображение структуры системы, в которой используются различные многоуровневые описания.
Так, для того чтобы, зная одноуровневую схему , перейти на основе (9.4) – (9.9) к двухуровневой, необходимо для каждой подсистемы  построить оператор
построить оператор  , описываемый соотношениями вида
, описываемый соотношениями вида
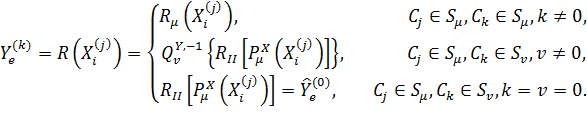
При этом оператор RII определяется соотношениями

Здесь 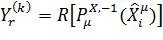 . Представляет практический интерес решение обратной задачи – нахождения оператора R при заданной двухуровневой схеме сопряжения. В этом случае, опираясь на (8.4) – (8.9), можно записать
. Представляет практический интерес решение обратной задачи – нахождения оператора R при заданной двухуровневой схеме сопряжения. В этом случае, опираясь на (8.4) – (8.9), можно записать
Очевидно, что в общем случае рассмотренная математическая схема может быть усложнена для учета ситуаций, когда структура связей изменяется во времени и/или под влиянием некоторых факторов детерминированного или стохастического характера. Учет этих факторов реализуется путем использования изменяющегося во времени оператора сопряжения вида

где α – фактор воздействия. При этом все рассмотренные выше принципы построения схемы сопряжения сохраняются.
Дата публикования: 2015-09-17; Прочитано: 1385 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
