 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Классификация АСР. Принципы управления
|
|
Управление — это целенаправленное воздействие на объект, которое обеспечивает его оптимальное (в определенном смысле) функционирование и количественно оценивается величиной критерия (показателя) качества. Критерии могут иметь технологическую или экономическую природу (производительность технологической установки, себестоимость продукции или т. п.).
Во время работы выходные величины отклоняются от заданных значений под действием возмущений zВ и появляется рассогласование между текущими уТ и заданными и3 значениями выходных величин объекта. Если при наличии возмущений zВ объект самостоятельно обеспечивает нормальное функционирование, т. е. самостоятельно устраняет возникающее рассогласования уТ—и3, то он не нуждается в управлении. Если же объект не обеспечивает выполнения условий нормальной работы, то для нейтрализации влияния возмущений на него налагают управляющее воздействие хР, изменяя с помощью исполнительного устройства материальные или тепловые потоки объекта. Таким образом, в процессе управления на объект наносятся воздействия, которые компенсируют возмущения и обеспечивают поддержание нормального режима его работы.
Регулированием называют поддержание выходных величин объекта вблизи требуемых постоянных или переменных значений с целью обеспечения нормального режима его работы посредством подачи на объект управляющих воздействий.
Автоматическое устройство, обеспечивающее поддержание выходных величин объекта вблизи требуемых значений, называют автоматическим регулятором.
По принципу регулирования АСР делят на действующие по отклонению, по возмущению и по комбинированному принципу.
По отклонению. В системах, работающих по отклонению регулируемой величины от заданного значения (рис. 1-2, а), возмущение z вызывает отклонение текущего значения регулируемой величины у от ее заданного значения и. Автоматический регулятор АР сравнивает значения у и и, при их рассогласовании вырабатывает регулирующее воздействие х соответствующего знака, которое через исполнительное устройство (на рис. не показано) подается на объект регулирования ОР, и устраняет это рассогласование. В системах регулирования по отклонению для формирования регулирующих воздействий необходимо рассогласование, в этом состоит их недостаток, поскольку задача регулятора состоит именно в том, чтобы не допускать рассогласование. Однако на практике такие системы получили преимущественное распространение, так как регулирующее воздействие в них осуществляется независимо от числа, вида и места появления возмущающих воздействий. Системы регулирования по отклонению являются замкнутыми.
По возмущению. При регулировании по возмущению (рис 1-2, б) регулятор АРВ получает информацию о текущем значении основного возмущающего воздействия z1. При измерении его и несовпадении с номинальным значением иВ регулятор формирует регулирующее воздействие х, направляемое на объект. В системах, действующих по возмущению, сигнал регулирования проходит по контуру быстрее, чем в системах, построенных по принципу отклонения, вследствие чего возмущающее воздействие может быть устранено еще до появления рассогласования. Однако реализовать регулирование по возмущению для большинства объектов химической технологии практически не представляется, возможным, так как это требует учета влияния всех возмущений объекта (z1, z2, …) число которых, как правило, велико; кроме того, некоторые из них не могут быть оценены количественно. Например, измерение таких возмущений как изменение активности катализатора, гидродинамической обстановки в аппарате, условий теплопередачи через стенку теплообменника и многих других наталкивается на принципиальные трудности и часто неосуществимо. Обычно учитывают основное возмущение, например, по нагрузке объекта.
Кроме того, в контур регулирования системы по возмущению сигналы о текущем значении регулируемой величины у не поступают, поэтому с течением времени отклонение регулируемой величины от номинального значения может превысить допустимые пределы. Системы регулирования по возмущению являются разомкнутыми.
По комбинированному принципу. При таком регулировании, т. е. при совместном использовании принципов регулирования по отклонению, и по возмущению (рис. 1-6, в), удается получить высококачественные системы. В них влияние основного возмущения z1 нейтрализуется регулятором АРВ, работающим по принципу возмущения, а влияние других возмущений (например, z2 и др.)—регулятором АР, реагирующим на отклонение текущего значения реагируемой величины от заданного значения.
По числу регулируемых величин АСР делят на одномерные и многомерные. Одномерные системы имеют по одной регулируемой величине, вторые — по несколько регулируемых величин.
В свою очередь многомерные системы могут быть разделены на системы несвязанного и связанного регулирования. В первых из них регуляторы непосредственно не связаны между собой и воздействуют на общий для них объект регулирования раздельно. Системы несвязанного регулирования обычно используются, когда взаимное влияние регулируемых величин объекта мало или практически отсутствует. В противном случае применяют системы связанного регулирования, в которых регуляторы различных величин одного технологического объекта связаны между собой внешними связями (вне объекта) с целью ослабления взаимного влияния регулируемых величин. Если при этом удается полностью исключить влияние регулируемых величин одна на другую, то такая система связанного регулирования называется автономной.
По числу контуров прохождения сигналов АСР делят на одноконтурные и многоконтурные. Одноконтурными называются системы, содержащие один замкнутый контур, а многоконтурными — имеющие несколько замкнутых контуров
По назначению (характеру изменения задающего воздействия) АСР подразделяются на системы автоматической стабилизации, системы программного управления и следящие системы.
Системы автоматической стабилизации предназначены для поддержания регулируемой величины на заданном значении, которое устанавливается постоянным (u =const). Это наиболее распространенные системы.
Системы программного управления построены таким образом, что заданное значение регулируемой величины представляет собой известную заранее функцию времени u=f(t). Они снабжаются программными датчиками, формирующими величину и во времени. Такие системы используются при автоматизации химико-технологических процессов периодического действия или процессов, работающих по определенному циклу.
В следящих системах заданное значение регулируемой величины заранее не известно и является функцией внешней независимой технологической величины u=f(y1). Эти системы служат для регулирования одной технологической величины (ведомой), находящейся в определенной зависимости от значений другой (ведущей) технологической величины. Разновидностью следящих систем являются системы регулирования соотношения двух величин, например, расходов двух продуктов. Такие системы воспроизводят на выходе изменение ведомой величины в определенном соотношении с изменением ведущей. Эти системы стремятся устранить рассогласование между значением ведущей величины, умноженным на постоянный коэффициент, и значением ведомой величины.
По характеру регулирующих воздействий различают непрерывные АСР, релейные и импульсные.
Непрерывные АСР построены так, что непрерывному изменению входной величины системы соответствует непрерывное изменение величины на выходе каждого звена.
Релейные (позиционные) ACP имеют в своем составе релейное звено, которое преобразует непрерывную входную величину в дискретную релейную, принимающую только два фиксированных значения: минимально и максимально возможное. Релейные звенья позволяют создавать системы с очень большими коэффициентами усиления. Однако в замкнутом контуре регулирования наличие релейных звеньев приводит к автоколебаниям регулируемой величины с определенными периодом и амплитудой. Системы с позиционными регуляторам являются релейными.
Импульсные АСР имеют в своем составе импульсное звено, которое преобразует непрерывную входную величину в дискретную импульсную, т. е. в последовательность импульсов с определенным периодом их чередования. Период появления импульсов задается принудительно. Входной величине пропорциональны амплитуда или длительность импульсов на выходе. Введение импульсного звена освобождает измерительное устройство системы от нагрузки и позволяет применять на выходе маломощное, но более чувствительное измерительное устройство, реагирующее на малые отклонения регулируемой величины, что приводит к повышению качества работы системы.
В импульсном режиме возможно построение многоканальных схем, при этом уменьшается расход энергии на приведение в действие исполнительного устройства.
Системы с цифровым вычислительным устройством в замкнутом контуре регулирования также работают в импульсном режиме, поскольку цифровое устройство выдает результат вычисления в виде импульсов, следующих через некоторые промежутки времени, необходимые для проведения вычислений. Это устройство применяют, когда отклонение регулируемой величины от заданного значения должно вычисляться по показаниям нескольких измерительных приборов или когда в соответствии с критериями наилучшего качества работы системы необходимо вычислять программу изменения регулируемой величины.
Статика и динамика систем. Уравнения статики и динамики. Линеаризация уравнений. Линейные системы. Основные понятия об устойчивости.
Равновесные и неравновесные состояния систем. В промышленных условиях автоматические системы, а также их отдельные элементы, могут находиться в равновесных (статических) я неравновесных (динамических) состояниях. Равновесные состояния характеризуются постоянством во времени входных, промежуточных и выходных величин. При эксплуатации объектов химической технологии равновесные состояния систем нарушаются в результате действия различных возмущений, при этом входные, промежуточные и выходные величины систем изменяются во времени; такое их состояние называют неравновесным. При изучении автоматических систем основное внимание уделяют их поведению в этом режиме.
Исследование систем в равновесных и неравновесных состояниях проводят с помощью различных функциональных зависимостей, характеризующих поведение систем. При этом под входными и выходными величинами обычно понимаются относительные приращения, определяемые аналогично величинам, приведенным в табл. I.1.
Уравнения статики и динамики. Поведение системы в установившемся состоянии определяется уравнениями статики, или статическими характеристиками. Под статической характеристикой понимают зависимость между входной хвх и выходной хвых величинами системы в равновесном состоянии
хвых =f(хвх) (I,1)
Обычно уравнения статики являются алгебраическими.
Поведение системы в неравновесном состоянии или в переходном процессе описывается уравнениями динамики. В общем виде уравнение динамики или динамическая характеристика системы с входной хвх и выходной хвых величинами представляет собой зависимость типа
хвых =f(хвх,t) (I,2)
которая, как правило, представляет собой дифференциальное: уравнение. Прохождение сигнала по каналам системы характеризуется своими уравнениями статики и динамики.
Линеаризация уравнений. Поведение реальных систем обычно описывается нелинейными уравнениями. Решение таких уравнений довольно сложно, нахождение даже приближенного численного решения требует большого объема вычислений. Поэтому при инженерных методах анализа и расчета реальных систем применяют линеаризацию уравнений: нелинейные уравнения заменяют приближенными линейными, решать которые значительно проще.
Часто нелинейной бывает лишь статическая характеристика системы или ее элементов. Так, нелинейную характеристику имеет резервуар для газа, входной величиной которого является степень открытия вентиля на линии поступления газа, а выходной — давление газа в аппарате.
Непрерывно дифференцируемую нелинейную статическую характеристику можно линеаризовать, например, по методу малых отклонений. Для этого функцию разлагают в ряд Тейлора в окрестности точки, соответствующей нормальному (заданному) режиму работы системы, в данном случае это точка А с координатами хвх 0 и хвых 0 (рис. I-3).

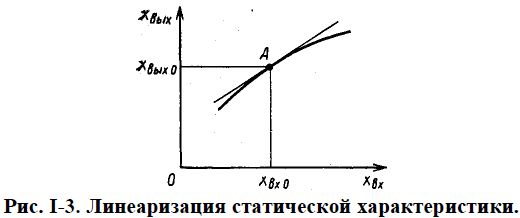
Отбрасывая члены ряда, содержащие бесконечно малые величины второго и более высоких порядков, получим
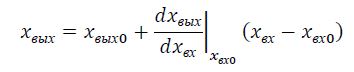
Эта зависимость представляет собой уравнение прямой линии, касательной к линеаризуемой функции при значении аргумента хвх 0. Введя обозначения

получим
Некоторые простые функции (произведение, частное от деления переменных х, у и др.) можно линеаризовать, подставив в них вместо переменных х, у выражения типа (x0+Δx), ( y0+Δy ). Выполнив математические операции, предписываемые линеаризуемыми функциями, и исключив из полученных зависимостей слагаемые, содержащие приращения второго и более высоких порядков, получают искомую линеаризованную функцию. Например, линеаризация произведения двух переменных проводится следующим образом:

Принимая во внимание, что x0y0=z0 найдем

Аналогичным образом линеаризуют и уравнения динамики.
Линейные системы в статике и динамике описываются линейными уравнениями. Такие системы подчиняются принципу суперпозиции, или независимости возмущений. Он заключается в том, что реакция системы на сумму входных воздействий равна сумме реакций на каждое из воздействий в отдельности, т. е. каждая входная величина системы создает свою составляющую выходной величины независимо от изменения других входных величин. Это позволяет рассматривать поведение системы отдельно по каждому каналу прохождения сигнала.
Уравнение статики линейной системы имеет вид
где k= const — коэффициент усиления, или коэффициент передачи системы.
Расчет линейных систем в статике состоит в определении общего коэффициента усиления по значениям k отдельных ее элементов или в нахождении других конструктивных либо технологических параметров отдельных элементов системы, необходимых для ее расчета.
Уравнение динамики линейной системы n-го порядка с одной входной и одной выходной величинами это неоднородное линейное дифференциальное уравнение с постоянными коэффициентами:

где а0, а1,…, ап-1, ап; b0,b1,…, bп-1, bп; — постоянные коэффициенты, зависящие от параметров входящих в систему элементов; i — время.
В физически реализуемых системах порядок левой части этого уравнения выше или равен порядку правой части уравнения, т. е. п ≥ т. В левой части уравнения группируют слагаемые, содержащие выходную величину и ее производные, а в правой — слагаемые с входной величиной и ее производными. При нескольких входных величинах все слагаемые, содержащие входные величины и их производные, записывают в правую часть уравнения. При наличии нескольких выходных величин поведение системы в переходном режиме описывают системой уравнений динамики, число которых равно числу выходных величин.
Решение уравнения динамики (I,6) представляет собой зависимость изменения выходной величины системы во времени при известном входном воздействии. По полученному решению определяют качество переходного процесса.
Уравнение динамики (I,6) при хвх = 0 имеет вид:

Это однородное уравнение. Оно характеризует поведение системы, предоставленной самой себе, после снятия внешних возмущений. Его называют уравнением свободного движения системы.
Устойчивость. Под устойчивостью понимают свойство системы самостоятельно возвращаться к равновесному состоянию после устранения возмущения, нарушившего ее равновесие. Это означает, что свободная составляющая переходного процесса с течением времени должна стремиться к нулю, т. е.

Устойчивость является важным показателем работы системы. Не удовлетворяющие условию (I,11) системы неустойчивы. Работоспособными являются только устойчивые системы; для определения устойчивости исследуется уравнение (1,7).
 При апериодическом или колебательном сходящемся переходном процессе в системе (см. рис. 1-4, а, б) она устойчива, при апериодическом или колебательном расходящемся (рис. 1-4, г, д) — неустойчива. Гармонический колебательный процесс условно рассматривают как устойчивый при небольшой амплитуде колебаний, допустимой по условиям технологического процесса. При амплитуде же колебаний, превышающей допустимые отклонения, систему считают неустойчивой.
При апериодическом или колебательном сходящемся переходном процессе в системе (см. рис. 1-4, а, б) она устойчива, при апериодическом или колебательном расходящемся (рис. 1-4, г, д) — неустойчива. Гармонический колебательный процесс условно рассматривают как устойчивый при небольшой амплитуде колебаний, допустимой по условиям технологического процесса. При амплитуде же колебаний, превышающей допустимые отклонения, систему считают неустойчивой.

Дата публикования: 2015-09-17; Прочитано: 541 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
