 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Структурный синтез манипулятора
|
|
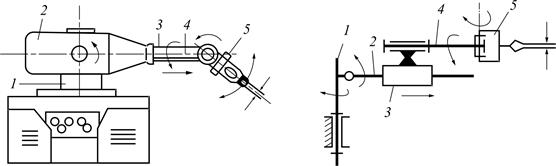
Подвижность манипулятора (рис. 1.18) характеризуется числом независимых движений, которое задается звеньям, чтобы движение выходного звена было вполне определенным.
а б
Рис. 1.18. Схемы манипулятора: а – внешний вид;
б – кинематическая схема; 1, 2, 3, 4, 5 – звенья
Для определения числа степеней подвижности манипулятора с голономными связями достаточно найти разность между общим числом координат, определяющих положение его звеньев, и числом независимых уравнений связей.
Если исполнительный механизм имеет Pi кинематических пар, то общее число связей S, налагаемых на относительные движения звеньев, равно сумме числа связей всех пар:
 .
.
Если все уравнения связей независимы, приходим к известной формуле Малышева для определения числа степеней подвижностей:
 ,
,
¨ где n – число подвижных звеньев.
Для незамкнутой кинематической цепи число связей
 .
.
В случае избыточных или пассивных связей число уравнений связей уменьшается:
 ,
,
¨ где q – число избыточных связей, а число степеней подвижностей механизма определяется по формуле
 .
.
При известном числе степеней свободы можно из последней формулы найти число избыточных связей:
 .
.
В манипуляторах избыточные связи могут появиться, например, при проектировании передаточного механизма для осуществления движения в шарнире основного механизма.
О.Г. Озол предложил формулу определения числа избыточных связей для многоконтурных механизмов:
 ,
,
где k – число независимых контуров в механизме, отличающихся от других контуров по крайней мере одним звеном или кинематической парой; f – сумма подвижностей кинематических пар.
Под структурным синтезом манипулятора понимается проектирование его структурной схемы по заданным структурным условиям: типу, числу степеней свободы, виду движения перемещаемого объекта. Для реализации заданного движения объекта с числом степеней свободы W 0число степеней подвижностей манипулятора W мне может быть меньше, чем W 0:
 .
.
Это условие позволяет решить задачу отбора цепей, имеющих минимальное число степеней свободы и обладающих полной подвижностью относительно заданного вида движения объекта.
Основной задачей структурного синтеза манипулятора является выбор числа звеньев, класса и порядка расположения кинематических пар.
Принцип наслоения механизмов предполагает построение на одном из подвижных звеньев нового механизма, при этом число степеней свободы всей системы увеличивается.
Комбинируя кинематические цепи, можно создать манипуляторы, выполняющие разнообразные функции.
Дата публикования: 2015-07-22; Прочитано: 1284 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
