 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Эквивалент высшей кинематической пары
|
|
При изучении кинематических и динамических свойств плоских механизмов удобно заменять механизм с высшими кинематическими парами 4-го класса механизмом с низшими кинематическими парами.
Эквивалент высшей пары в плоском механизме можно найти путем сопоставления двух механизмов, у которых одно и то же число степеней свободы и одинаковые законы движения звеньев.
Пусть в исходном механизме имеется одна высшая пара, в заменяющем – лишь пары 5-го класса.
Приравнивая выражения для W обоих механизмов, вычисленные по формуле (1.2), можно получить
3 n – 2 р 5 – р 4 = 3 n / – 2 р 5/.
Штрихи относятся к заменяющему механизму, отсюда
р 4 = 2(р 5/ – р 5) – 3(n / – n). (1.6)
Равенство (1.6) превращается в тождество при p 4 = 1; p 5/ – p 5 = 2
и n / – n = 1, т.е. заменяющий механизм по сравнению с исходным должен содержать одно дополнительное звено и две кинематические пары 5-го класса.
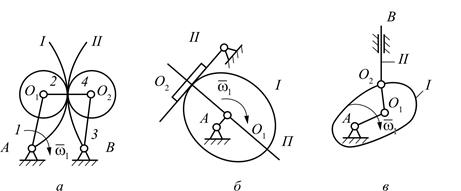
Рис. 1.10. Замена высшей пары одним звеном и двумя низшими парами:
а – замена высшей пары, образованной двумя криволинейными поверхностями;
б – замена высшей пары, образованной криволинейной поверхностью и прямой линией; в – замена высшей пары, образованной криволинейной поверхностью
и точкой, образованной двумя прямыми линиями
Чтобы звенья заменяющего механизма в рассматриваемом положении совершали такое же движение, как и звенья исходного механизма, необходимо соблюдать определенные правила замены высшей пары одним звеном и двумя низшими парами (рис. 1.10).
Дата публикования: 2015-07-22; Прочитано: 885 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
