 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Рычажные механизмы
|
|
Звенья рычажных механизмов соединены с помощью вращательных и кинематических пар. По характеру движения относительно стойки различают следующие пять типов звеньев рычажных механизмов: кривошип 1, образующий со стойкой вращательную пару (y≥2π), коромысло 3,
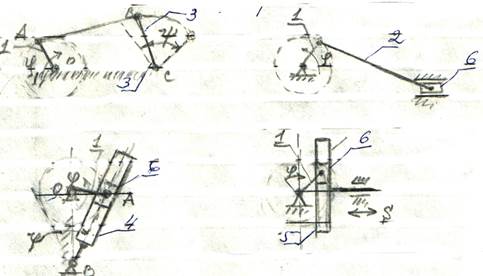
образующее со стойкой вращательную пару и совершающее колебательное движение в пределах ψ<2π, шатун 2, образующий с подвижными звеньями две вращательные пары и совершающий относительно стойки сложные плоскопараллельные движения; кулиса 4, образующая со стойкой вращательную пару, или кулиса 5, образующая со стойкой и с подвижным ползуном поступательную пару; ползун 6, образующий поступательную пару со стойкой или с кулисой. В зависимости от типа ведущего или ведомого звена различают следующие четырехзвенные рычажные механизмы:
· Кривошипно-коромысловый
· Кривошипно-ползунный
· Кулисный
В рычажных механизмах передаточное отношение можем оставаться постоянным или изменяться по определенному закону.
y=rcosφ
При проектировании рычажных механизмов, как правило, закон преобразования движения (функция перемещения) известен. Однако одна и та же характеристика может быть воспроизведена различными по структуре рычажными механизмами. Для однозначности выбора следует учитывать достаточно большое число факторов: конструктивных, технологических, эксплуатационных, точностных. Стремление получить механизм абсолютно точно воспроизводящий заданный преобразования, приводит к увеличению числа звеньев и следовательно к усложнению механизма и ухудшению его точностных характеристик.
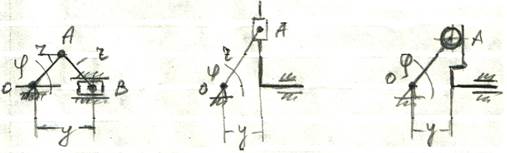
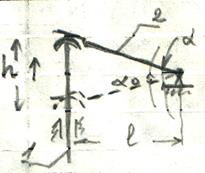
Поэтому иногда ограничиваются выбором наиболее простого механизма, реализующего заданную функцию перемещения лишь приблизительно. В приборах используются различные простейшие рычажные механизмы. Синусный механизм, служащий для преобразования поступательного движения во вращательное, включает:
 |
1. толкатель, движущийся поступательно
2. рычаг со сферическим наконечником,
находящийся в колебательном движении.
Ведущим звеном может быть как толкатель, так и рычаг. Функция перемещения, синусного механизма, т.е. зависимости между перемещением толкателя h и углом поворота рычага длиной l на угол α.
h=l[sin(α-α0)+sin α0]
Здесь α0 – угол характеризующий начальное положение рычага. Как видно функция перемещения не зависит от радиуса наконечника рычага. Передаточное отношение для случая если ведущим звеном является толкатель:
i1,2=dh/dα=lcos(α-α0)
Передаточная функция-первая производная от функции перемещения по координатам ведущего звена, т.к. α0 –постоянная величина.
Передаточное отношение не остается постоянным, его мгновенное значение определяется положением звеньев механизма, (углом поворота α). Максимальное значение соответствует положению, когда α=α0
Изменение мгновенного передаточного отношения при ведущем рычаге определяют с помощью выражения:
δ1,2 =(i2,1- i2,1min)/ i2,1min
Начальные положении рычага надо выбирать так, чтобы α0= α/2
Синусные механизмы применяются в сильфонных манометрах, центробежных тахометрах, автоматических и счетно-решающих устройств.
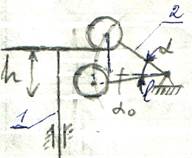
Тангенсные механизмы применяют для тех же целей. В отличие от синусных, в которых точка контакта при работе механизма перемещается по плоской поверхности толкателя, в тангенсных механизмах она скользит по рабочей поверхности рычага.
В тангенсном механизме, функция перемещения определяеться зависимостью:
h=l[tg(α-α0)+tgα0+r(1/cosα0-1/cos(α-α0))]
Кривошипно-ползунные механизмы являются наиболее распространенными; применяются они в машинах и приборах для преобразования поступательного движения во вращательное или наоборот.
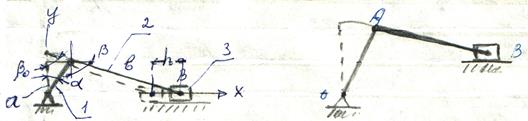
Аксиальный (простой) дезаксиальный
Характеристика аксиального механизма может быть найдена проектированием звеньев на координатные оси.
 На ось ох:
На ось ох:
asinα+bsinβ=
На ось oy:
acosα=bcosβ
отсюда: Решая уравнения совместно, получим:

Передаточное отношение механизма у которого ведущим звеном является кривошип:
 , где k=a/b
, где k=a/b
Если ведущим является ползун, то:
Из уравнений видно, что передаточное отношение кривошипно-ползунного механизма непостоянно, и зависит от отношения длин кривошипа и шатуна и угла поворота ведущего звена α.
Поэтому в передаточных механизмах точных приборов изменение передаточного отношения необходимо учитывать при выборе чувствительного механизма и расчета шкалы. Если в передаточном механизме прибора передаточное отношение постоянно, то при использовании кривошипно-ползунного механизма его рабочий угол можно определить из графика по допустимому δi.
Кривошипно-ползунные механизмы применяют во многих приборах, где чувствительным элементом являются манометрические трубки, мембраны, сильфоны, и другие упругие элементы.
Дата публикования: 2015-07-22; Прочитано: 2041 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
