 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Теоретична частина. У багатьох випадках коливання різних тіл відбуваються відносно положення стійкої рівноваги ( ПСР)
|
|
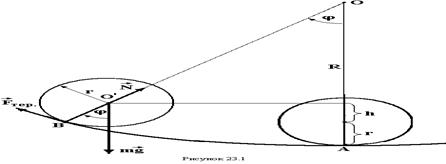
У багатьох випадках коливання різних тіл відбуваються відносно положення стійкої рівноваги (ПСР). У ПСР кожна система має мінімальне значення потенціальної енергії і тому при відхиленні від нього виникає сила, яка повертає тіло назад. Розглянемо випадок, коли циліндр знаходиться на угнутій поверхні. На рис. 23.1 показаний циліндр, який відкотили від ПСР (від точки А) на кут φ. Вважаємо, що ковзання відсутнє. На циліндр діють три сили, які показані на рис.23.1: сила тяжіння mg, сила тертя Fтр. і сила реакції угнутої поверхні N. Відносно осі обертання, яка співпадає з лінією дотику між циліндром та угнутою поверхнею (на рис.23.1 точка В), із цих трьох сил тільки сила тяжіння створює обертальний момент М = mgr∙sinφ, який повертає циліндр у ПСР. При відсутності ковзання циліндр буде скочуватись у ПСР з кутовим прискоренням, яке зв’язане з обертальним моментом. Використаємо основне рівняння динаміки обертального руху:
M = I·ε, (23.1)
де І – момент інерції циліндра відносно осі В, ε – кутове прискорення циліндра відносно осі В, М – момент сили тяжіння.
Внаслідок того, що момент сили тяжіння mgr·sinφ являється функцією кута φ, необхідно кутове прискорення ε теж виразити через другу похідну за часом від кута φ. Встановимо зв'язок між кутовим прискоренням обертання радіуса угнутої поверхні, який проходить через центр циліндра і кутовим прискоренням обертання радіуса циліндра r відносно миттєвої осі В. Тангенціальне прискорення центра циліндра при скочуванні у ПСР можна записати так:
aτ = (R – r)·φ", (23.2)
де R – радіус угнутої поверхні, r – радіус циліндра, φ" – друга похідна за часом. Це кутове прискорення радіуса R, що проходить через центр циліндра. Це ж саме прискорення можна записати так:
aτ = r·ε, (23.3)
де ε = кутове прискорення радіуса r відносно миттєвої осі В, яке входить у рівняння (23.1). Прирівнюючи (23.2) і (23.3), маємо:
rε = (R – r)φ", або
ε = (R – r)φ"/r (23.4)
Підставимо у (23.1) замість М і ε їх значення:
mgr sinφ = I(R – r)φ"/r (23.5)
Для малих відхилень від ПСР скористаємось наближеною рівністю sinφ ≈ φ (φ у радіанах). Навіть якщо φ = 10о, то sin10o ≈ 0,1736, a 10o ≈ 0,1745 рад і відносна похибка при використанні наближеної рівності sinφ ≈ φ у цьому випадку складає всього ≈ 0,52 %. Тобто відхилення від ПСР до 10о можна вважати малими. Рівняння (23.5) у наближеній формі має вигляд:
mgrφ = I(R – r)φ"/r. (23.6)
У цьому запису присутня похибка. Кут повертання φ має зміст вектора, напрямок якого визначається за «правилом правого гвинта». Кутове прискорення теж вектор, але його напрямок протилежний вектору φ. Щоб виправити цю похибку рівняння (23.6) запишемо тепер у такому вигляді:
 (23.7)
(23.7)
Це диференціальне рівняння руху циліндра відносно ПСР. За своєю формою воно тотожне диференціальному рівнянню вільних незатухаючих гармонічних коливань:
Х" + ω2Х = 0 (23.8)
Термін «гармонічні коливання» обумовлений тим, що відхилення від положення рівноваги Х за часом описується гармонічними функціями:
Х = Хоsinωt, або X = Xocosωt, (23.9)
де Хо – найбільше відхилення від рівноваги (амплітуда), ω = 2π/Т – циклічна частота, Т – період коливань, ωt – фаза коливань, t – поточний час. Порівнюючи (23.7) і (23.8), отримуємо:
 (23.10)
(23.10)
Звідки:  (23.11)
(23.11)
Щоб отримати формулу періоду коливань для відповідного циліндра необхідно в (23.11) замість моменту інерції І підставити його конкретне значення. Для тонкостінного циліндра (товщина стінки набагато менша від радіуса) момент інерції відносно осі В визначимо за теоремою Штейнера:
I = mr2 + mr2 = 2mr2 (23.12)
Підставивши у (23.11) замість І = 2mr2, отримуємо формулу для періоду коливань тонкостінного циліндра:
 (23.13)
(23.13)
Для суцільного циліндра момент інерції відносно миттєвої осі обертання В теж визначаємо за теоремою Штейнера:
 (23.14)
(23.14)
Заміняючи у (23.11) І на 3/2mr2, отримуємо формулу періоду коливань суцільного циліндра:
 (23.15)
(23.15)
Момент інерції товстостінного циліндра відносно миттєвої осі обертання В:
I = 1/2m(Rз2 + Rв2) + Rз2, (23.16)
де Rз – зовнішній радіус, Rв – внутрішній радіус. В формулу (23.11) замість І підставляємо (23.16) і при цьому приймаємо до уваги, що r = RЗ. Тоді:
 (23.17)
(23.17)
Зауваження. При записах формул(23.1 –23.7) ми свідомо відмовились від векторної форми з метою спрощення доведень.
Дата публикования: 2015-07-22; Прочитано: 196 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
