 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Введение. 1. Кафаpов В.В. Методы кибеpнетики в химии и химической технологии:4-е изд., пеpеpаб., доп.- М.: Химия
|
|
1. Кафаpов В.В. Методы кибеpнетики в химии и химической технологии:4-е изд., пеpеpаб., доп.- М.: Химия, 1985 (учебн. для вузов), 448 с., ил.
2. Ахназаpова С.Л., Кафаpов В.В. Оптимизация экспеpимента в химии и химической технологии: Учебн. пособие для химико-технологических вузов.- М.: Высш. школа, 1978.- 319 с., ил.
3. Статистические методы в инженеpных исследованиях (лабоpатоpный пpактикум): Учеб. Пособие / Боpодюк В. П, Вощинин А. П., Иванов А. З., и дp.; Под ред. Г. К. Кpуга.- М.: Высш. школа, 1983.- 216 с., ил.
4. Методические указания к выполнению экспериментальных исследований по УНИРС для студентов специальности 1209 “Водоснабжение и канализация”. Планирование эксперимента по очистке сточных вод. Ровно: УИИВХ, 1977. – 30 с.
ЛAБОРАТОРНА РОБОТА № 5. ОПТИМАЛЬНЕ ПРОЕКТУВАННЯ СЕКЦІЙНОГО ВОДО-ВОДЯНОГО ТЕПЛООБМІННИКА
Тpивалiсть pоботи - 2 год.
1 МЕТА РОБОТИ: Необхідно запроектувати оптимальний трубчастий протиточний водо-водяний теплообмінник на основі його математичної моделі.
2 ЗАГАЛЬНI ПОЛОЖЕННЯ
В лабораторній роботі необхідно представити повний опис моделюємого об'єкту і принципу його роботи, розрахувати параметри робочого тіла в характерних точках циклу, процесу або установки, визначити основні показники ефективності: ККД, питомі витрати тепла і палива, втрати тиску тощо. Всі розрахунки зробити за інженерними методиками, тобто з урахуванням втрат тепла тощо.
Математична модель повинна являти собою систему інтегральних, диференційних або алгебраїчних рівнянь, що описують фізичні процеси, які відбуваються у моделюємому об'єкті.
Зазвичай ця система містить у собі:
- рівняння зберігання енергії;
- рівняння зберігання маси;
- рівняння зберігання кількості імпульсу;
- рівняння теплопередачі;
- рівняння масовіддачі.
Принципи побудови моделей теплоенергетичних установок докладно розглянуті в [1, 3, 7, 5, 13] і викладати їх у даних методичних вказівках немає потреби.
Вибір критерію оптимізації (або ефективності) - це вибір показника, на основі якого знаходяться найбільш раціональні (оптимальні) параметри роботи установки. Як критерій оптимізації можна вибирати термічний, ефективний, ексергетичний або повний ККД установки; питомі показники: витрати палива або тепла; техніко-економічні: річні приведені витрати, собівартість, прибуток, рентабельність, збиток тощо.
За параметри оптимізації можна вибирати як конструктивні (діаметр, товщину, крок і кількість труб тощо), так і параметри енергоносіїв (швидкості, температури, витрати тощо). Кількість оптимізуємих параметрів у данній роботі рекомендується вибирати не менше двох і не більш чотирьох. На обрані параметри встановлюють обмеження, базуючись на фізичному змісті або технічних умовах роботи моделюємого об'єкту. Наприклад: швидкість води в трубах не може бути від’ємною (нижня межа) і не може перевищувати 2-15 м/с за технічних умов (верхня межа).
Обраний критерій оптимізації повинен зв'язувати оптимізуємі параметри між собою (бути залежними від них), а зв'язок цей повинен бути обов'язково нелінійний. Встановивши обмеження на параметри, що оптимизуються, роблять дослідження обраного критерію на екстремум (пошук мінімуму або максимуму функції декількох змінних при наявності обмежень). Для цього можна скористуватися одним з математичних методів пошуку екстремуму. Рекомендується вибирати чисельні методи рішення задач умовної оптимізації [1, 4, 7, 10]. Для обраного методу необхідно скласти програму і виконати всі необхідні розрахунки. Результатом цих розрахунків повинні бути оптимальні параметри роботи оптимізуємого об'єкту або його оптимальні конструктивні характеристики. Можна також скористатися такими прикладними програмами, як EXСEL, MathCad, Mathematica або іншими широко доступними спеціалізованими програмами або мовами програмування BASIC, PASCAL, Delphi, С++.
У звіті необхідно навести блок-схему алгоритму і програму оптимізації. Графічна частина виконується на комп'ютері за допомогою доступних засобів комп'ютерної графіки. Рекомендується виконати схему установки, що моделюється і оптимизується з указівкою всіх потоків робочих тіл, параметрів, розмірів, а також приблизний графік оптимізуємої функції з урахуванням обмежень на всі оптимізуємі параметри.
3 ПОРЯДОК ВИКОНАННЯ ЛАБОРАТОРНОЇ РОБОТИ
3.1 Опис апарата, що моделюється
Необхідно запроектувати оптимальний трубчастий протиточний водо-водяний теплообмінник, у якому гаряча вода рухається по трубах діаметром dзн/dвн, із тиском на вході P1, охолоджується від t11 до t12. Масова витрата води, що гріє, G1. Нагріваєма вода рухається по міжтрубному просторі з тиском на вході P2 і змінює свою температуру від t21 до t22 (мал. 1). Більш детальний опис теплообмінника можна знайти у [2, 3, 8].
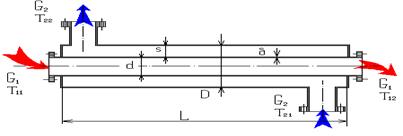
Мал. 1. Схема водо-водяного теплообмінника
3.2 Загальна математична модель рекуперативного теплообмінного апарату
У рекуперативних теплообмінних апаратах перенос тепла здійснюється крізь розділяючу стінку. Універсальна математична модель такого апарату при ламінарній течії теплоносіїв представляє собою систему рівнянь – переносу імпульсу, суцільності, переносу енергії, переносу тепла у твердому тілі [3, 8].

 (1)
(1)
де Р1, Р2 – тиск у каналах першого та другого теплоносіїв;
wx, wy, wz - проекції вектору швидкості потоку першого та другого теплоносіїв;
t1, t2 - температури у каналах першого та другого теплоносіїв;
gx, gy, gz - проекції прискорення свободного тяжіння;
q - температура розділяючої стінки;
r1, r2, rТ - густина першого та другого теплоносіїв і матеріалу стінки;
ср1, ср2, срТ - питомі теплоємкості;
l1, l2, lТ - коефіцієнти теплопровідності;
m1, m2, - динамічна в’язкість першого і другого теплоносіїв*1.
Густина теплоносіїв залежить від тиску та температури, тому до системи рівнянь треба додати рівняння термодинамічного стану теплоносів:



Таким чином маємо систему з тринадцяти рівнянь із тринадцятьма невідомими: w1x, w1y, w1z, w2x, w2y, w2z, t1, t2, P1, P2, q, r1, r2. Для отримання єдиного рішення системи треба приєднати крайові умови. Аналітичне рішення цієї системи рівнянь навіть для найпростіших видів теплообмінників пов’язано з великими технічними і математичними труднощами. Це пов’язано, перш за все, з наявністю пограничного шару та процесами тепловіддачі у ньому. Проблема з розв’язанням системи може бути вирішена шляхом визначення коефіцієнта тепловіддачі за емпіричними формулами.
Ввівші поняття коефіцієнтів тепловіддачі, теплопередачі і встановлюючи умови взаємодії теплоносіїв та твердого тіла у вигляді:
а також прийнявши одномірну течію теплоносіїв, отримуємо спрощену систему рівнянь:

 (2)
(2)
Для стаціонарного режиму роботи теплообмінника з каналами постійного прохідного перетину рівняння приймають вид:

 (3)
(3)
 Інтегрування системи рівнянь дає інтегральну математичну модель стаціонарного теплообмінного апарату рекуперативного типу [3, 8]:
Інтегрування системи рівнянь дає інтегральну математичну модель стаціонарного теплообмінного апарату рекуперативного типу [3, 8]:
 (4)
(4)
 |
Або припускаючи, що x11=x12, x21=x22, w11=w12=w1,w21=w22=w2 о станні два рівняння перетворюються до:
До системи (4) треба додати такі рівняння:
r=f(p,t), cp=f(t) – залежності теплофізичних властивостей від параметрів стану теплоносіїв;
f1= n p d2 /4; f2= …(залежить від типу і конструкції теплообмінника) - живі перетини каналів для першого і другого теплоносіїв;
Re1=w1 d1 r1 /m1; Re 2= w2 d2r2 /m2 -числа Рейнольдса для першого і другого теплоносіїв;
Pr1=a1r1/m1; Pr2= a2r2/m2 - числа Прандтля для першого і другого теплоносіїв;
Nu1=a1d1/l1; Nu 2 =a 2 d 2 /l 2 -числа Нуссельта для першого і другого теплоносіїв;
Nu1=f1(Re, Pr); Nu2=f2(Re, Pr) - емпіричні рівняння тепловіддачі для першого і другого теплоносіїв;
l1тр = f1(Re1, D), l2тр =f2(Re2, D) - коефіцієнти тертя при просуванні теплоносіїв у каналах;
F=pdnl - площа поверхні теплообміну.
Для конструктивного розрахунку невідомими параметрами є конструктивні параметри теплообмінника: довжина трубок - l, діаметр трубок - d, крок міжтрубного простору - s (входить до формули визначення еквівалентного розміру міжтрубного простору), кількість трубок – n. Для перевірочного розрахунку - параметри теплоносіїв на виході з апарату: вихідна температура нагріваючього теплоносію - t12, вихідна температура нагріваємого теплоносію - t22. Таким чином число степенів свободи при конструктивному розрахунку більше ніж при перевірочному.
Проектування оптимального теплообмінника полягає у тім що, треба визначити такі конструктивні параметри, які забезпечать найбільше (найменше) значення критерію ефективності.
Визначення оптимального режиму теплообмінника полягає у тому, що треба визначити такі параметри теплоносіїв, які забезпечать найбільше (найменше) значення критерію ефективності для теплообмінника заданої конструкції.
3.3 Вибір критерію ефективності та оптимізуємих параметрів
Техніко-економічними критеріями ефективності функціонування теплообмінників можуть бути: ККД, ексергетичний ККД, капітальні, експлуатаційні, приведені витрати, приведений дохід та прибуток. Скористуємося річними приведеними витратами, як більш універсальним показником.
Приведені витрати на створення та експлуатацію теплообмінного апарату:
П=(Ен+Еам)К+Е, (6)
де Ен - нормативний коефіцієнт ефективності капітальних вкладень, 1/рік;
Еам - норма відрахувань на амортизацію та поточний ремонт, 1/рік;
Е - річні експлуатаційні витрати, грн/рік;
К - капітальні вкладення, грн. Для їх визначення можна скористатися даними наведеними в [8] з деякими поправками на діючі ціни.
Як оптимізуємі змінні виберемо швидкості гріючого та нагріваємого теплоносіїв. Від швидкостей, використовуючи рівняння нерозривності, можна перейти до інших параметрів: діаметру та міжтрубного простору.
3.4 Аналіз наявності оптимальних рішень
Фіксоване значення теплового потоку Q при незмінному температурному напорі між середовищами Dt (відповідно до закону Ньютона-Ріхмана) може досягатися при різноманітних значеннях коефіцієнта теплопередачі k і поверхні теплообмінника F, що відповідають умові k=Q/Dt, причому з підвищенням швидкостей w1 і (або) w2 теплоносіїв росте значення k і, як слід, зменшується F. При цьому зменшуються капітальні витрати на поверхню теплообміну За (вартість теплообмінника і щорічні амортизаційні відрахування). Проте підвищення швидкостей приведе до зростання гідравлічного опору і потребує великих річних витрат електроенергії на перекачування теплоносіїв Е (привід насосів). Залежність амортизаційних відрахувань від швидкості нелінійна і виражається через критеріальне рівняння теплопередачі (орієнтовно обернено пропорційно швидкості в степіні приблизно 0,8). Залежність річних витрат на електроенергію від швидкості також нелінійна (орієнтовно прямо пропорційна швидкості в степіні 2). В результаті функція річних приведених витрат буде мати екстремум (мінімум) при деяких значеннях швидкості гріючого і нагріваємого теплоносіїв (мал. 2).

Мал. 2. Залежність річних приведених витрат від швидкості води
Визначення конструктивних характеристик теплообмінника, що відповідають цим значенням швидкостей, є метою оптимального проектування теплообміного апарату.
3.5 Спрощена інтегральна математична модель
Для усіх варіантів оптимізації приймаємо типові значення параметрів:
- число годин роботи теплообмінника за рік t = 7000 год/рік;
- питома вартість теплообмінника зі сталевих труб Сf= 1000 грн/м2;
- теплопровідність труб зі сталі lст = 48 Вт/м К;
- ціна електроенергії Се = 25 коп / кВт год;
- ККД насосів hн= 0,85;
- коефіцієнти місцевих опорів x1 = 5, x2 = 4;
- довжина трубок однієї секції L =2 м.
Інтегральна детермінована математична модель протиточного водо-водяного теплообмінного апарату є системою рівнянь:

 , (7)
, (7)
до якої додаються ще такі рівняння:
- коефіцієнт теплопередачі:
 ;
;
- коефіцієнти тепловіддачі:
a1 =Nu1 l1/ dвн ;
де Nu = 0,021 Re10. 8 Pr10. 43(Pr1/Prст)0.25;Re1=dвн w1/n1;
a2 =Nu2 l2/dэкв;
де Nu2=0,021 Re2 0.8Pr 2 0.43 (Pr2/Prст)0.25; Re2=dэквw2 /n2;
- площі поверхні теплообмінника:
F = L dcp p;
d=0,5(dнар - dвн); dcp=0.5(dвн+dнар);
- середній логарифмічний температурний напір для противотоку:
 ;
;
- коефіцієнти в’язкого тертя при русі теплоносіїв у трубі і міжтрубному просторі:
 ;
;  ;
;
- рівняння теплофізичних властивостей теплоносіїв.
Для визначення теплофізичних властивостей теплоносіїв рекомендується користуватися методичними вказівками [9], апроксимувати табличні значення [6] за допомогою програми APPROX або знайти формули у довідковій літературі [2, 8].
Змінна потужності приводних двигунів перекачуючих насосів:
 ;
;  ;
;
 ;
;  .
.
Змінна частина річних амортизаційних витрат:
Зам= (Ен+Еам) Сf F,
де Ен = 0.12 - коефіцієнт ефективності капітальних витрат.
Змінна частина єксплуатаційних річних витрат на електроенергію:
Е=Сэ(DN1+DN2)t
Змінна частина річних приведених витрат (критерій оптимізації):
П =Зам + Е;
Таким чином, задача формулюється в такий спосіб: знайти такі значення швидкостей w1 і w2 при яких річні приведені витрати П мінімальні з урахуванням обмежень (7).
У такій постановці задача належить до задач умовної нелінійної оптимізації. Для урахування обмежень скористаємося методом штрафних функцій і перетворимо обмеження до канонічної форми:
 (8)
(8)
Запишемо штрафну функцію у формі:
 (Еам+Ен)Сf F+
(Еам+Ен)Сf F+
+Cш  , (9)
, (9)
де Сш – штрафний коефіцієнт (достатньо велике число).
Отже таку функцію треба дослідити на екстремум.
3.6 Вибір методу пошуку оптимуму
Оптимальне (за швидкістю первинного і вторинного теплоносіїв) проектування секційного водо-водяного теплообмінника можна здійснити за допомогою алгоритму Гаусса-Зейделя (координатного спускe) за критерієм "приведені витрати", що враховує вартість витрачаємої за рік електроенергії і річні амортізаційні витрати. Більш детальний аналіз застосування чисельних методів пошуку екстремумів можна знайти у [5, 7, 10].
Перед проведенням оптимального проектування варто задатися значенням швидкості з інтервалу 1...3 м/с і виконати однократний проектний розрахунок "вручну" за обраним алгоритмом для перевірки правильності роботи алгоритму.
Розглянемо алгоритм пошуку мінімуму богатомірної функції F(x1, x2,..., xn). Покладемо, що відома прямокутня область на площині (x1, x2,..., xn) де функція має оптимум.
Алгоритм покоординатного спірального спуску полягає у зведенні багатомірной задачі оптимізіції до послідовності рішення одномірних задач [4].
Крок 1: Задаємося координатами початкової точки (x1°, x2°,..., xn°) і обчислюємо значення функції в неї: F(x1°, x2°,..., xn°).
Крок 2: Задаємося початковим приростом по кожній змінній:
(Dx1, Dx2,..., Dxn).
Крок 3: Зафіксуємо будь-які (n-1) координат
Крок 4: По незафіксованій однієй координаті робими крок на величину Dx, і знаходимо, координату нової точки (x1°+ Dx1, x2°,...,xn°) і обчислюємо значення функції в цій новій точці F(x1°+ Dx1, x2°,..., xn°).
Крок 5: Порівнюємо значення F (x1°+ Dx1, x2°,..., xn°) і F (x1°, x2°,..., xn°).
Якщо F (x1°+ Dx1, x2°,..., xn°) < F (x1°, x2°,..., xn°), тоце вдалий крок і можна по вибраній координаті робити ще кроки доки буде виконуватися ця умова.
Якщо F (x1°+ Dx1, x2°,..., xn°)> F (x1°+ Dx1, x2°,..., xn°), то крок не вдалий і варто перейти до іншої координати, і повернутися до кроку 4.
Якщо всі координати вичерпані і чергові кроки не дають змешення функції, то треба зменшити величину кроку Dx (наприклад у 5 разів) і змінити їх знаки на протилежні: (Dx1, Dx2 ,..., Dxn)/(-5).
 Крок 6: Перевірити на досягнення оптимуму: якщо різниця абсолютних значень функцій на даному кроку і попередньому не перевищує задану малу величину, то процес пошуку оптимуму закінчений; якщо перевищує її, то перейти до кроку 3.
Крок 6: Перевірити на досягнення оптимуму: якщо різниця абсолютних значень функцій на даному кроку і попередньому не перевищує задану малу величину, то процес пошуку оптимуму закінчений; якщо перевищує її, то перейти до кроку 3.
Геометрична інтерпритація цього процесу для функції двох змінних наведена на мал. 3.
Мал. 3. - Пошук оптимуму функції двох змінних методом покоординатного спуску
На основі цього алгоритму складена модіфікована програма оптимізації, відома як “два кроки” [11]. Нижче подане рішення задачі оптимізації теплообмінника за допомогою прикладного пакета МathСad [11, 12].
3.7 Програмна реалізація математичної моделі та її оптимізація
Задача оптимізації у прикладному пакеті МathСad для кращого розуміння вирішена спрощеним способом: досліджується на екстремум не штрафна функція (9), а річні приведені витрати (6). Увесь алгоритм складається з двох основних частин: перша - тепло-гідравлічний розрахунок теплообмінника та розрахунок крітерія ефективності, друга - його мінімізація. Перший розрахунок має за мету ув’язати крітерій ефективності із оптимізуємими параметрами. Другий розрахунок ваконаний двома способами: аналітичне рішення системи діференційних рівнянь у часткових похідних і чисельним методом координатного спуску “два кроки”. Обидва методи супроводжуються ілюстраціями та графіками поведінки оптимізуємої функції. Усі розрахунки з коментарами. Ціна електроенергії та вартість 1 м2 площі теплообмінника – приблизні (діючі на 2004 р.).
У програмі застосовані деякі оператори і функції МathСad:
Given… Find - операторні дужки “дано-знайти”;
Pspline(…) - оператор лінійної інтерполяції сплайнами;
Interp(…) - оператор згладжування і регресії;
If…otherwise - оператор умов “якщо-у іншому випадку”;
Root (…) - оператор знаходження кореня виразу у дужках.
Для апроксимації властивостей теплоносіїв застосовані засоби, які надає МathСad - інтерполяція залежностей лінійними, квадратичними та кубічними поліномами.
Більш докладно про роботу у прикладному пакеті MathCad дивіться в [11,12].
4 Контрольні питання
1. Що таке математична модель?
2. У чому полягає процес оптимізації?
3. Які основні рівняння складають математичну модель?
4. Чим відрізняються діференційна та інтегральна математичні моделі?
5. Поясніть поняття статичних, стохастичних, дінамічних та детермінованих моделей.
6. Надайте характеристику Вашої математичної моделі.
7. Які характеристики визначаються при оптимальному проектуванні установок?
8. За яким критерієм здійснюється оптимізація в лабораторній роботі?
9. За якими змінними здійснюється оптимізація в лабораторній роботі?
10. Які обмеження накладаються на змінні, що оптимізуються?
11. Поясніть характер залежностей крітерію оптимізації від оптимізуємих змінних.
12. У чому полягає метод оптимізації Гаусса-Зейделя?
13. Які ще методи оптимізації крім Гаусса-Зейделя можна запропонувати і застосувати?
14. Які величини повинні бути відомі до початку розрахунків з оптимізації?
5 Література
1. Методические указания по курсу "Моделирование и оптимизация теплоенергетических систем" (в 4-х частях). /Г. С. Сапрыкин, В. М. Житаренко.- Мариуполь: ЖдМИ, 1989.
2. Справочник по теплообменникам. В 2-х томах. -М.: Энергоатомиздат, 1987.
3. Теплоиспользующие установки промышленных предприятий /Под ред. Ильченко О. Т. – Х.: Высшая школа, 1985. - 85 с.
4. Мудров А. Е. Численные методы для ПЭВМ на языках Бейсик, Фортран, Паскаль. - Томск, “Раско”, 1991.
5. Попырин Л. С. Математическое моделирование и оптимизация теплоенергетических установок.- М.: Энергия, 1978.
6. Александров А. А. Теплофизические свойства води и водяного пара. - М.: Энергоатомиздат, 1984.
7. Бояринов А. И. Кафаров В. В. Методы оптимизации в химической технологии. - М.: Химия, 1969.
8. Бажан П. И. Справочник по теплообменным аппаратам. - М.: Машиностроение, 1989. – 200 с.
9. Методичні вказівки до лабораторної роботи “Моделювання теплофізичних властивостей води, водяної пари та продуктів згоряння на ЕОМ”. / Житаренко В. М. - Маріуполь, ПГТУ. - 1999.
10. Химмельблау Д. Прикладное нелинейне программирование..- М.: Мир, 1975.-534 с.
11. Очков В. Ф. MathCAD 8.0 Pro для студентов и инженеров. - М.: КомпьютерПресс, 1999. – 384 с.
12. Дьяконов В. П., Абраменкова И. В. MathCAD 7.0 в математике, физике и в Internet. – М.: Нолидж, 1998. - 352 с.
Додаткова література
13. Андрющенко А. И. Термодинамические расчеты оптимальных параметров в тепловых электростанциях. – М.: Высшая школа, 1963. - 298 с.
14. Макаревич В.В., Стерман Л. С. Экономическая эффективность теплофикации при работе отопительных ТЭЦ в базовом и маневренном режимах. // Теплоэнергетика. – 1986. - № 3. - с. 65-67.
15. Методичні вказівки до лабораторної роботи “Рішення задач лінійного програмування” / Житаренко В. М. - Маріуполь, ПГТУ. – 1999.
16. Кафаров В. В., Мешалкин В. П., Гурьева Л. В. Оптимизация теплообменных процессов и систем. - М.: Энергоатомиздат, 1988. – 192 с.
17. Банди Б. Методы оптимизации. Вводный курс: Пер. с англ. - М.: Радио и связь, 1988. - 128 с.: ил.
18. Сухарев А. Г., Тимохов Ю. В., Федоров В. В. Курс методов оптимизации. - М.: Наука, 1986. - 328 с.
19. Уайлд Д. Дж. Методы поиска экстремума. - М.: Наука, 1967. - 268 с.: ил.
20. Вульман Ф. А., Хорьков Н. С. Тепловые расчеты на ЭВМ теплоэнергетических установок. - М.: Энергия, 1975. - 200 с.
Введение
Любые устройства, в том числе и устройства связи, радиоавтоматики или аудиовизуальной аппаратуры требуют присутствия в своем составе устройства управления (контроллера). Контроллеры требуются практически во всех предметах и устройствах, которые окружают нас.
Одним распространёнными в настоящее время являются микроконтроллеры фирмы Atmel семейства AVR. Несмотря на то, что они появились на рынке в 1996 году, их популярность до сих пор очень высока. С каждым годом они захватывают все новые и новые ниши на рынке. Не последнюю роль в этом играет соотношение показателей цена/быстродействие/энергопотребление, до сих пор являющееся едва ли не лучшим на рынке 8-битных микроконтроллеров.
- Описание и характерные особенности микроконтроллеров ATmega8535
Как и все микроконтроллеры AVR фирмы «Atmel», микроконтроллеры семейства Mega, а в частности ATmega8535 являются 8-разрядными микроконтроллерами, предназначенными для встраиваемых приложений. Они изготавливаются по малопотребляющей КМОП-технологии, которая в сочетании с усовершенствованной RISC - архитектурой[1] позволяет достичь наилучшего соотношения быстродействие/энергопотребление. Контроллеры описываемого семейства являются наиболее развитыми представителями микроконтроллеров AVR.
К некоторым особенностям микроконтроллера ATmega 8535 относятся:
- FLASH -память программ объемом 8 Кбайт с возможностью внутрисистемного перепрограммирования и загрузки через последовательный канал SPI (число циклов стирания/записи не менее 1000);
- оперативная память (статическое ОЗУ) объемом 512 байт;
- энергонезависимая память данных (EEPROM) объем 512 байт с возможностью внутрисистемного перепрограммирования и загрузки через последовательный канал SPI (число циклов стирания/записи не мене 100000);
- возможность защиты от чтения и модификации памяти программ и данных;
- возможность программирования непосредственно в системе через последовательные интерфейсы SPI и JTAG;
- возможность программного снижения частоты тактового генератора;
- 130 команд, большинство из которых выполняются за один машинный цикл;
- 17 внутренних+3 внешних источников прерываний;
- наличие программного стека;
- наличие аппаратного умножителя;
- 32 8-битных регистра общего назначения (далее РОН);
- 32 программируемые линии ввода/вывода;
- диапазон напряжений питания от 4,5 В до 5,5 В;
- производительность до 8 MIPS при частоте 8 МГц и т.д.
1.1 Устройства ввода/вывода ATmega8535
Микроконтроллеры семейства Mega имеют наиболее богатый набор периферийных устройств (ПУ). При этом в большинстве моделей имеются все ПУ, которые вообще встречаются в составе микроконтроллеров AVR. У микроконтроллера ATmega8535 имеются в наличии [3]:
1) многофункциональные, двунаправленные GPIO порты ввода-вывода с встроенными нагрузочными резисторами. Конфигурация портов ввода/вывода задаётся программно;
2) два 8-разрядных таймера/счетчика (таймеры ТО и Т2);
3) 16-разрядный таймер/счетчик (таймер Т1);
4) 4 канала ШИМ-модулятора разрядностью 8 бит (один из режимов работы 8-разрядных таймеров/счетчиков ТО и Т2);
5) аналоговый компаратор;
6) восьмиканальный 10-разрядный АЦП с дифференциальными входами:
- программируемый коэффициент усиления перед АЦП 1, 10 и 200;
- опорное напряжение 2,56 В.
7) полнодуплексный универсальный асинхронный приемопередатчик UART;
8) последовательный синхронный интерфейс SPI;
9) последовательный двухпроводный интерфейс TWI (аналог интерфейса I2С).
1.2 Архитектура микроконтроллера ATmega8535
Микроконтроллер ATmega8535 имеет гарвардскую архитектуру (программа и данные находятся в разных адресных пространствах) и систему команд, близкую к идеологии RISC. Процессор имеет 32 8-битных регистра общего назначения, объединённых в регистровый файл. В отличие от «идеального» RISC, регистры не абсолютно ортогональны:
- три «сдвоенных» 16-битных регистра-указателя X (r26:r27), Y (r28:r29) и Z (r30:r31);
- некоторые команды работают только с регистрами r16…r31;
- результат умножения (в тех моделях, в которых есть модуль умножения) всегда помещается в r0:r1.
Структура процессора также представляется как «высокопроизводительная RISC -архитектура с пониженным энергопотреблением» Гарвардского типа. Одним из основных достоинств этого контроллера является быстрое выполнение команд - он выполняет команду за один такт. AVR имеет, вероятно, наиболее разносторонний по своим возможностям процессор из всех микроконтроллеров. Это означает, что при разработке приложений надо потратить немного больше времени на планирование размещения данных в памяти и регистрах, чем для других микроконтроллеров. Но благодаря своей разносторонности AVR очень прост в программировании как для разработчиков прикладных программ на языке ассемблера так и для тех, кто пишет компиляторы языков высокого уровня.
Как и в любом процессоре, особенности являются следствием общих принципов, использованных при разработке этих процессоров. Организация набора регистров микропроцессоров AVR, которого представлена в графическом виде на рисунок 1. Такая организация обеспечивает высокую эффективность процессора при обработке данных.

Рисунок 1 – Приоритеты регистров в архитектуре процессоров AVR
Дата публикования: 2014-11-18; Прочитано: 843 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
