 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Подсистема ультразвукового сканирования
|
|
Подсистемой ультразвукового сканирования осуществляется пространственно-селективное ультразвуковое зондирование исследуемой среды и формирование многомерного сигнального поля как функции пространственных координат, времени, амплитуды, спектра или других параметров эхосигналов, а также преобразование этого поля в упорядоченную во времени одномерную последовательность эхосигналов, согласованную с радиотехническим трактом ИИС. В подсистеме сканирования выполняется также предварительная обработка сигналов, включающая процедуры функционального усиления, задержки, стробирования, ограничения, пространственной фильтрации, нормировки и другие, в результате которой обеспечивается согласование диапазонов изменения параметров электроакустического волнового тракта с соответствующими характеристиками радиотехнических устройств формирования, отображения и анализа эхоизображений.
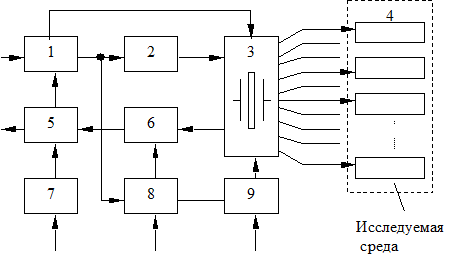
Рис. 3.2. Обобщенная структура подсистемы ультразвукового сканирования: 1 – устройство сканирования; 2 – генератор зондирующих сигналов; 3 – ультразвуковой преобразователь; 4 – эхолокационные каналы; 5 – запоминающее устройство; 6 – приемник эхосигналов; 7 – корректор координат; 8 – корректор амплитуды; 9 – корректор луча
Структура подсистемы ультразвукового сканирования в зависимости от решаемых ИИС задач может быть весьма разнообразной, однако во всех случаях неотъемлемыми ее частями являются: генератор электрических сигналов, излучающие и приемные электроакустические преобразователи, сканирующие устройства, приемник эхосигналов и необходимые устройства первичной обработки эхосигналов (рис. 3.2). В процессе формирования эхоизображений генератор электрических сигналов вырабатывает импульсы, возбуждающие электроакустический преобразователь, который излучает ультразвуковые зондирующие импульсы в исследуемую среду. Электроакустический преобразователь по существу является также акустической антенной, обеспечивающей направленное излучение зондирующих ультразвуковых импульсов. В исследуемой среде в пределах пространственной протяженности ультразвукового луча образуются волновые эхолокационные каналы.
В ультразвуковой эхоскопии преимущественно используются простые зондирующие импульсы [9]. Форма огибающей этих импульсов бывает прямоугольной, экспоненциальной или колоколообразной. В большинстве случаев она зависит от добротности и резонансных свойств используемых электроакустических преобразователей. Наряду с простыми иногда применяются и широкополосные зондирующие импульсы с внутриимпульсной частотной модуляцией. По аналогии с радиолокацией применение частотно-модулированных широкополосных ультразвуковых зондирующих импульсов позволяет строить эхоскопические системы со сжатием эхосигналов. Однако этот принцип построения ИИС в ультразвуковой эхоскопии еще не нашел удовлетворительной практической реализации.
Приемник служит для оптимального выделения полезных сигналов на фоне реверберационных акустических шумов и других помех, а также для сжатия их динамического диапазона. С приемником сопряжены также устройства предварительной обработки эхосигналов, обеспечивающие некоторые функции восстановления их параметров, искаженных в результате дифракционного расхождения ультразвукового луча, действия диссипативных потерь и рассеяния зондирующих импульсов на структурных неоднородностях среды. Далее эхосигналы поступают в запоминающее устройство, в котором формируется тот или иной тип эхограммы.
В зависимости от функционального назначения средств эхоскопии требования к конструктивным особенностям первичных преобразователей и сканирующих устройств могут существенно меняться. Например, для биомедицинских исследований в кардиологии требуются преобразователи ограниченных размеров и быстродействующие сканирующие устройства, а для исследования органов брюшной полости – подсистемы сканирования, обеспечивающие многоракурсный, панорамный ультразвуковой обзор. Сильная зависимость затухания ультразвука от частоты в биологических средах ограничивает верхний диапазон рабочих частот, применяемых для эхоскопии. Это, в свою очередь, определяет предельные метрологические возможности метода, поскольку разрешающая способность эхоскопов определяется шириной спектра зондирующих сигналов. Поэтому при выборе рабочей частоты обычно принимается компромиссное решение с учетом достижения максимальной глубины ультразвукового зондирования при необходимой разрешающей способности. В современной биомедицинской ультразвуковой эхоскопии наиболее часто используются рабочие частоты в диапазоне 0,5…15 МГц.
В качестве сканирующих могут применяться различные механические устройства, обеспечивающие перемещение электроакустического преобразо-вателя относительно исследуемого объекта, или многоканальные электричес-ки управляемые быстродействующие устройства, построенные на базе фазируемых или коммутируемых многоэлементных матриц пьезопреобразо-вателей. При построении быстродействующих подсистем ультразвукового сканирования приходится учитывать условие FZN £ c /2, связывающее частоту F повторения циклов ультразвукового сканирования, глубину зондирования Z и число строк N в кадре эхоизображения (с – скорость ультразвука, распространяющегося в среде).
Для исключения влияния искажающих возмущений и помех, проявляющихся в эхолокационных каналах, в составе подсистемы ультразвукового сканирования обычно предусматриваются соответствующие функциональные корректирующие устройства, например блоки временной регулировки усиления и динамического диапазона эхосигналов, коррекции поглощения, рассеяния ультразвука в среде и т. д.
С учетом того, что процессы эхоскопии случайно-неоднородных сред не всегда могут быть априори адекватно промоделированы, устройства коррекции сигнальных искажений должны допускать интерактивное воздействие оператора на возможно большее число управляемых параметров и характеристик электроакустического тракта. С этой целью в структурную схему современного эхоскопа часто вводятся блоки адаптивного управления параметрами приемно-усилительного тракта сканирующих подсистем и обеспечивается связь источника зондирующих сигналов с процессором. Введение таких дополнительных связей отражает появление функций программной управляемости измерительных зондирующих воздействий на объект при пространственном сканировании направления ультразвукового луча.
Дата публикования: 2014-11-02; Прочитано: 666 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
