 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Указания по организации самостоятельной работы
|
|
ЛАБОРАТОРНАЯ РАБОТА №1
Исследование принципов функционирования и конструктивных особенностей электроприводов постоянного тока, применяемых в технологическом оборудовании
Введение
Лабораторная работа предназначена для изучения функционирования и конструктивных особенностей электроприводов постоянного тока, применяемых в системах управления технологического оборудования.
Указания по организации самостоятельной работы
1.1.1. Перед работой необходимо ознакомиться с устройством и принципом функционирования двигателей постоянного тока. При подготовке к лабораторной работе необходимо дополнительно руководствоваться учебными пособиями по курсам «Аналоговая и цифровая схемотехника».
1.1.2. Электропривод постоянного тока. Система преобразователь-двигатель. Электроприводы с двигателями постоянного тока выполняются, как правило, с использованием преобразователей, которые осуществляют питание обмоток якоря. При питании электроприводов от сети переменного тока такими преобразователями являются мотор-генераторные установки в системах Г–Д или управляемые выпрямители всех видов – однофазные и трехфазные, реверсивные и нереверсивные, мостовые и с нулевой точкой. Статические преобразователи используются также для питания обмоток возбуждения двигателей.
Преобразователи обеспечивают регулирование координат электропривода и создают возможности энергосбережения в установившемся и переходном режимах.
Минимизация выделяемых в двигателе потерь мощности может обеспечиваться за счет регулирования тока возбуждения. Рассмотрим условия минимизации потерь мощности при следующих двух допущениях: учитываются только потери в цепях обмоток якоря и возбуждения и не учитывается насыщение магнитной цепи двигателя. При этих условиях установившийся режим работы двигателя описывается следующей системой уравнений:
(1.1)
(1.2)
(1.3)
где ΔPΣ, ΔРя, ΔРв – потери мощности соответственно суммарные, в цепях якоря и возбуждения; IЯ, IВ – соответственно токи в цепях якоря и возбуждения; RЯ, RВ – соответственно сопротивления цепей якоря и возбуждения; М, MС – моменты двигателя и нагрузки (сопротивления), равные в установившемся режиме друг другу; Ф – магнитный поток двигателя; k – конструктивный коэффициент двигателя; kВ – коэффициент пропорциональности между магнитным потоком и током возбуждения.
Подстановка формул (1.2) и (1.3) в формулу (1.1) приводит к следующему выражению для потерь мощности ΔPΣ:

(1.4)
Беря производную от ΔPΣ по току возбуждения IВ и приравнивая ее нулю, находим оптимальное значение тока возбуждения, при котором суммарные потери мощности ΔPΣ минимальны:

(1.5)
Минимальное значение суммарных потерь мощности ΔPΣопт, соответствующее этому току возбуждения, будет равно:

Из формулы (1.6) следует, что суммарные потери мощности будут минимальными в том случае, когда потери мощности в цепях якоря и возбуждения будут равны друг другу. Это положение справедливо и для других типов двигателей.
Из формулы (1.5) видно, что оптимальный ток возбуждения зависит от нагрузки двигателя Л/с, т.е. должен регулироваться при ее изменении. На рис. 1.1 показана схема электропривода, в котором осуществляется автоматическое поддержание тока возбуждения на оптимальном уровне при изменении нагрузки двигателя. При этом определение уровня нагрузки производится косвенно по измерению тока в якоре двигателя.
На схеме приняты следующие обозначения: ПЯ, ПВ – соответственно преобразователи цепей якоря и возбуждения; ДТЯ и ДТВ – соответственно датчики токов якоря и возбуждения; П – блок перемножения; ФП – функциональный преобразователь, осуществляющий расчет оптимального тока возбуждения Iв* в соответствии с формулой (1.5); РТВ – регулятор тока возбуждения; kв – коэффициент передачи цепи возбуждения; Я – якорь; UΔ, Uу – сигналы соответственно ошибки (рассогласования) и управления преобразователем возбуждения ПВ.

Рисунок 1.1. – Схема электропривода с двигателем постоянного тока при минимизации потерь мощности
Минимизация потерь при использовании такого подхода возможна при ненасыщенной магнитной цепи двигателя. Только в этом случае повышение тока до оптимального значения приведет к пропорциональному увеличению магнитного потока и снижению потерь в двигателе до минимального уровня.
Для электроприводов, работающих в повторно-кратковременном режиме с частыми пусками, торможениями и реверсами, эффективное энергосбережение может быть осуществлено за счет снижения потерь в этих переходных процессах. Применительно к системе преобразователь–двигатель постоянного тока это обеспечивается за счет управляемых пуска и торможения двигателя, когда подаваемое на якорь двигателя напряжение при пуске постепенно повышается от нуля до полного (номинального), а при торможении постепенно снижается до нулевого уровня. При этом режим торможения двигателя может быть реализован с рекуперацией (отдачей) энергии в сеть.
На рис. 1.2.а приведена схема электропривода, в которой осуществляется регулирование напряжения при пуске и торможении. Необходимым элементом схемы является задатчик скорости (ЗС), называемый также иногда задатчиком интенсивности. Его работу иллюстрируют диаграммы на рис. 1.2.б и 1.2.в. При подаче на вход ЗС ступенчатого сигнала задания скорости Uзс в момент времени t1, (пуск двигателя) напряжение Uзc на выходе ЗС начинает постепенно нарастать, например, по линейной функции времени, а при снятии этого сигнала в момент времени t2 (торможение двигателя) – постепенно снижаться.

а – схема электропривода;
б – сигнал на входе задатчика скорости;
в – сигнал на выходе задатчика скорости;
г – графики скорости холостого хода и скорости якоря
Рисунок 1.2. – Электропривод с двигателем постоянного тока с задатчиком скорости
В соответствии с этим пропорционально будут изменяться подаваемое на двигатель напряжение U и определяемая им скорость холостого хода двигателя ω0 = U/kФ (рис. 1.2.г). Скорость якоря двигателя ω(t) из-за инерционности элементов механической части электропривода и исполнительного органа рабочей машины при пуске будет несколько меньше скорости ω0, а при торможении – несколько больше. За счет этого, как и в рассмотренном ранее асинхронном электроприводе, будут снижены потери энергии в якоре двигателя.
При линейном нарастании напряжения при пуске двигателя потери энергии в его якоре ΔWупр определяются следующим выражением:

(1.7)
где ΔW – потери энергии при прямом пуске (ступенчатой подаче полного напряжения на якорь); Tм – электромеханическая постоянная времени,  tп – время пуска.
tп – время пуска.
Потери энергии ΔW якоре двигателя при прямом пуске определяются выражением

(1.8)
где J – момент инерции электропривода; ω0 – скорость холостого хода двигателя; sнач, sкон – соответственно начальный и конечный относительный перепад скорости двигателя,  Мср – средний момент двигателя при пуске; Мс – момент нагрузки двигателя.
Мср – средний момент двигателя при пуске; Мс – момент нагрузки двигателя.
Из формулы (1.7) следует, что при tп > 2Тм потери энергии при управляемом пуске будут меньше по сравнению с прямым пуском.
В системе генератор–двигатель, схема которой представлена на рис. 3.26, плавное изменение напряжения при пуске, торможении и реверсе двигателя происходит естественным образом вследствие наличия электромагнитной инерционности обмотки возбуждения генератора (ОВГ). При пуске двигателя замыкаются контакты аппарата КМ1 (или КМ2 для пуска двигателя в другом направлении), после чего происходит плавное нарастание тока возбуждения генератора (ВГ) Iвг, его ЭДС Ег и напряжения на якоре двигателя U, темп которого определяется постоянной времени цепи возбуждения генератора. За счет этого происходит снижение потерь мощности в двигателе по сравнению с пуском двигателя подачей полного (номинального) напряжения на якорь.

Рисунок 1.3. – Схема системы генератор–двигатель
Количественно снижение потерь энергии в двигателе может быть оценено с помощью выражения

(1.9)
где m отношение постоянных времени, m = Tв/Tм (Tв – постоянная времени цепи возбуждения генератора).
Из выражения (1.9) видно, что потери энергии в двигателе уменьшаются в (m + 1) раз по сравнению с соответствующими потерями в нем при скачкообразном изменении напряжения на якоре. Другими словами, чем больше инерция цепи возбуждения генератора и чем медленнее изменяется напряжение на якоре двигателя постоянного тока, тем меньше будут в нем потери энергии в переходных процессах.
Рекуперация энергии в сеть переменного тока при торможении двигателя (или на первом этапе его реверса) обеспечивается за счет свойства обратимости энергетических режимов электрических машин.
Торможение двигателя осуществляется отключением обмотки возбуждения от источника питания Uв размыканием контактов КМ1 (или КМ2). При этом происходит постепенное уменьшение тока возбуждения генератора Iвг, его ЭДС Ег и напряжения на якоре двигателя U. Вследствие наличия механической инерции якоря двигателя, элементов механической передачи и исполнительного органа рабочей машины ЭДС двигателя Eд, определяемая скоростью двигателя, превышает ЭДС генератора. При этом двигатель Д переходит в режим генератора, генератор Г – в режим двигателя, а приводной двигатель генератора АД – в режим генератора с отдачей (рекуперацией) энергии в сеть переменного тока напряжением U1.
Указанные свойства системы генератор–двигатель делают эту систему привлекательной с позиций энергосбережения, в первую очередь, для рабочих машин и производственных механизмов, работающих в повторно-кратковременном режиме. В то же время наличие электромашинного преобразователя (агрегат АД – Г) определяет более сложные условия эксплуатации электропривода, шум при работе, необходимость фундамента для установки этого агрегата, более высокие потери мощности по сравнению с полупроводниковыми преобразователями.
1.1.3. Электрическое торможение двигателей осуществляется переводом их в генераторный режим, в котором они создают на своем валу тормозной момент. По характеру взаимодействия с источником питания (сетью) различают три разновидности генераторного режима и соответственно три вида торможения:
– генераторный режим работы параллельно с сетью (режим рекуперативного торможения);
– генераторный режим работы последовательно с сетью (режим торможения противовключением);
– генераторный режим работы независимо от сети (режим динамического торможения).
Работа электрической машины в режиме генератора характеризуется одинаковым направлением ЭДС и тока якоря, в то время как в двигательном режиме ЭДС и ток якоря направлены встречно и двигатель потребляет электроэнергию.
Таким образом, для перевода двигателя в режим генератора необходимо обеспечить одинаковое направление ЭДС и тока якоря.
С позиций энергосбережения очевидным является использование рекуперативного торможения, поскольку в этом случае запасенная энергия в электроприводе и исполнительном органе рабочей машины может быть отдана (рекуперирована) источнику питания (в сеть), где может быть использована другими потребителями энергии. Два других вида торможения характеризуются преобразованием этой энергии в тепловую энергию, т.е. она попросту теряется. Рассмотрим режим рекуперативного торможения подробнее.
Режим рекуперативного торможения может быть реализован в системе управляемый выпрямитель–двигатель при использовании как нереверсивного, так и реверсивного выпрямителя.
1.1.4 Рекуперативное торможение в системе нереверсивный выпрямитель–двигатель. В этой схеме для обеспечения условий рекуперации энергии должны быть использованы устройства, обычно называемые реверсорами. Схема такой системы с реверсорами в цепи якоря двигателя приведена на рис. 1.4, а. На схеме УВ – управляемый тиристорный выпрямитель; В, Н – управляемые ключи реверсора; ОВ – обмотка возбуждения двигателя.
Реверсорами в такой схеме могут быть контактные или бесконтактные устройства.
Контактные реверсоры выполняются на базе электромагнитных контакторов общепромышленных серий или на основе специальных моноблочных конструкций электромагнитного типа. Для повышения надежности и срока службы электропривода обычно предусматривают бестоковую коммутацию цепей двигателя, что позволяет также использовать реверсоры без устройств дугогашения.
Бесконтактные реверсоры выполняются с использованием тиристоров. При их использовании также реализуется бестоковая коммутация тиристоров реверсора, обеспечиваемая путем закрытия тиристоров управляемого выпрямителя.
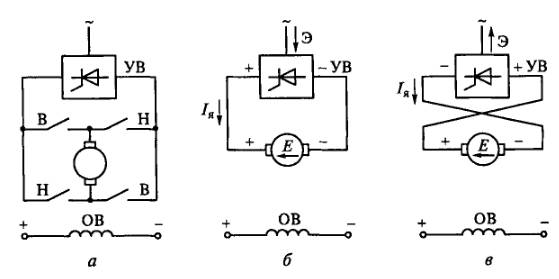
Рисунок 1.4 – Схемы электропривода с реверсорами в цепи якоря (а), при двигательном режиме (б), при рекуперации энергии (в)
Двигательный (основной) режим работы электропривода иллюстрирует схема на рис. 1.4.б, получаемая, например, при замыкании ключей В. В этом режиме угол управления а тиристорами УВ лежит в пределах α = 0...90° и он работает в выпрямительном режиме. ЭДС двигателя E ток якоря Iя направлены встречно, и двигатель потребляет электроэнергию.
Для осуществления рекуперативного торможения (реверса) двигателя вначале закрываются тиристоры УВ установкой угла а ≥ 90°. После прекращения протекания тока размыкаются ключи В и замыкаются ключи Н, УВ переводится в инверторный режим за счет увеличения угла управления тиристорами до значений, превышающих 90°.
Схема, иллюстрирующая этот режим, приведена на рис. 1.4.в. ЭДС и ток якоря оказываются направленными согласно, двигатель переходит в режим генератора, и электроэнергия Э отдается в сеть. При торможении угол α должен регулироваться таким образом, чтобы ток в якоре не превышал допустимых значений. К концу торможения угол α достигает 90°, ток в якоре становится равным нулю и реверсоры отключаются.
Режим рекуперативного торможения может быть реализован при использовании реверсоров в цепи обмотки возбуждения ОВ по схеме, показанной на рис. 1.5. В двигательном режиме работы электропривода включен, например, ключ В и тиристоры УВ работают с углами управления α в пределах 0...90°.
Для осуществления рекуперативного торможения (реверса) двигателя размыкаются ключи В и замыкаются ключи Н, а УВ переводится в инверторный режим за счет увеличения угла управления тиристорами до значений, превышающих 90°. За счет изменения направления тока возбуждения и соответственно магнитного потока ЭДС также изменяет свое направление на противоположное и ток якоря оказываются направленным с ней согласно. Двигатель переходит в режим генератора, и электроэнергия Э отдается в сеть.
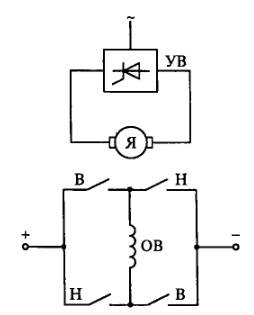 |
Рисунок 1.5 – Схема электропривода с реверсорами в цепи обмотки возбуждения
1.1.5. Рекуперативное торможение в системе реверсивный выпрямитель–двигатель. В состав реверсивного выпрямителя (рис. 1.6) входят два нереверсивных управляемых выпрямителя УВ1 и УВ2. При двигательном режиме работы электропривода один из выпрямителей, например УВ1, работает в выпрямительном режиме с углом управления α1 < 90°, а другой, УВ2, работает в инверторном режиме с углом α2 > 90° (при совместном управлении) или его тиристоры закрыты (при раздельном управлении). Этому режиму соответствуют направления ЭДС, тока якоря и электроэнергии, показанные на рис. 3.29 сплошными линиями.
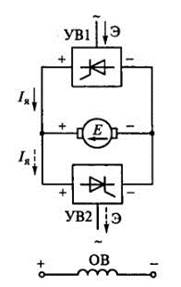 |
Рисунок. 1.6 – Схема электропривода с реверсивным выпрямителем
Для реализации рекуперативного торможения (реверса) угол α1 должен быть увеличен, а угол α2 уменьшен, за счет чего и будет происходить рекуперация энергии в сеть с использованием УВ2. Этому режиму соответствуют направления ЭДС Е, тока якоря и электроэнергии, показанные на рис. 3.29 штриховыми линиями.
1.2. Описание лабораторной установки. Основной частью установки является привод ЭПУ1-2-3727П.
В состав электропривода входят следующие элементы:
– блок управления БС–Ш; электродвигатель М1; трансформатор Т1;
– сетевые (коммутационные или токоограничивающие) реакторы L2;
– сглаживающий дроссель (для высокомоментных двигателей) L1;
– аппаратура защиты от коротких замыканий (25, 50, 100 А – блок предохранителей U1, на 80, 200 А – автомат Р7);
– источник питания обмотки возбуждения (только в электроприводах подач для двигателей с электромагнитным возбуждением) U2;
– блок ввода (только в электроприводах главного движения для подключения возбудителя к сети) UЗ;
– задатчик скорости технологический (по заказу) R1, R2.
Основу силовой схемы якорных тиристорных преобразователей ТПЯ составляет 3-фазная мостовая схема, выполненная:
– на силовых оптронных тиристорных модулях или тиристорных модулях с применением блоков импульсных трансформаторов – для блоков управления БС на номинальные токи 25, 50, 100 А.
– на таблеточных тиристорах с применением блоков импульсных трансформаторов – для блоков управления БС на токи 80, 200, 400 и 630 А.
Электроприводы на токи 100, 200, 400 и 630 А выполнены с принудительным охлаждением, на токи 25, 50 и 80 А – с естественным. При этом в преобразователях 25, 50, 100 А защита производится предохранителями, а в преобразователях на токи 80, 200, 400 и 630 А – автоматами.
Электроприводы подачи выполняются по трансформаторным и бестрансформаторным реверсивным схемам с номинальным выпрямленным напряжением блоков управления БС на 115, 230 и 460 В.
Исполнение электропривода с выпрямленным напряжением 230 В (460 В) для питающих сетей линейным напряжением 220 и 230 (380-440) В может реализовываться по бестрансформаторной схеме с сетевым реактором.
В якорной цепи для высокомоментных двигателей предусмотрено применение сглаживающего дросселя L1 (при необходимости). Для двигателей с электромагнитным возбуждением используется трехфазный блок возбудителя U2 (БВ) нерегулируемый и регулируемый.
В многокоординатных электроприводах используются коммутационные реакторы L2 для исключения взаимного влияния электроприводов, а блок:озбудителя (БВ) может быть общим. Для защиты силового трансформатора необходимо применение автоматического выключателя F7, который в комплект поставки не входит.
Электроприводы главного движения ЭПУ выполняются по бестрансформаторным и трансформаторным реверсивным и нереверсивным схемам. Построение реверсивного тиристорного якорного преобразователя ТПЯ аналогично описанному выше в электроприводах подачи.
Тиристорный преобразователь возбудителя ТПВ выполнен по однофазной мостовой схеме на выпрямленное напряжение содержит:
– в двухзонных реверсивных электроприводах – два оптронных тиристорных модуля;
– в однозонных и двухзонных нереверсивных – один оптронный и один диодный модули.
Подключение у сети ТПВ осуществляется через блок ввода из, включающий в себя коммутационный реактор LЗ и предохранители U4, U6.
В случае использования трансформаторов ТСТ и двигателей с электромагнитным возбуждением с напряжением обмотки возбуждения 110 В блок возбудителя 112 подключается к специальной обмотке.
Для электроприводов подач с напряжением обмотки возбуждения 220 В блок 132 подключается к 2-м фазам вторичной силовой обмотки трансформатора Т1 конденсатор МБГЧ-1-2А-500 В-1 мкФ±10%; резистор С5-35В-50 Вт 100 Ом; при необходимости защиты от радиопомех в комплектном устройстве, в котором устанавливаются электроприводы, между фазами питающей сети и землей подключить конденсаторы емкостью (1–2) мкФ.
Для управления электроприводом от ручного задатчика используются контакты аппарата (реле, тумблер и т. д.) выбора направления движения «В1»–вперед и «Н1»–назад. Контакт «Р» – «работа» осуществляет разблокировку регулятора скорости.
Нажатием на кнопку Б2 осуществляется аварийная (экстренная) остановка привода.
Для управления электроприводом от системы ЯПУ замыкающий контакт реле управления (из ЧПУ) подключает «+15 В» к клемме «Работа», аналогично контакту «Р».
Электропривод состоит из блока управления БС3203...П (преобразователя ТПЯ), электродвигателя постоянного тока M1 со встроенным тахогенератором BRI, согласующего трансформатора Т1, блока предохранителей U1, задатчика скорости R1, пусковой аппаратуры (контакты «Работа», «Сброс защит»). При необходимости в цепь якоря двигателя Ml включается сглаживающий дроссель L1. В случае использования электродвигателя с электромагнитным возбуждением для питания обмотки возбуждения ОВМІ используется блок возбудителя U2. Принципиальная схема электропривода приведена на рисунке 1.7.
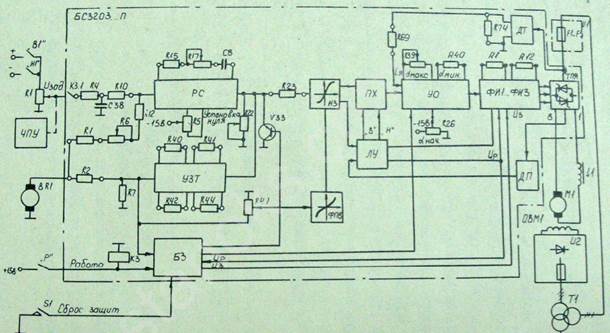
Рисунок 1.7 – Структурная схема ЭПУ1-2-3727П
Система регулирования электроприводом выполнена одноконтурной с ПИ-регулятором скорости PC и обратной связью по току на вход управляющего органа УО.
Управление тиристорами ТПЯ производится от трехканальной СИФУ, содержащей формирователи импульсов ФИ1-ФИЗ. Ввод управляющего сигнала в ФИ1-ФИЗ, а также его смещение и ограничение осуществляется с помощью переменных резисторов R26, R40, R39 соответственно управляющим органом УО. Переключение импульсов управления с комплекта тиристоров «В» на комплект тиристоров «Н» преобразователя ТПЯ производится блоком логического устройства ЛУ, которое работает в функции сигнала заданного направления тока и выходного сигнала датчика проводимости вентилей ДП. Сигнал заданного направления тока на вход ЛУ поступает с выхода нелинейного звена НЗ. Звенья НЗ и ФПЕ с резистором R47 образуют устройство линеаризации характеристик электропривода в режиме прерывистого тока (РПТ). При этом коэффициент передачи НЗ обратно пропорционален коэффициенту передачи ТПЯ. С помощью устройства линеаризации осуществляется поддержание примерно одинакового коэффициента усиления линеаризованного таким образом преобразователя.
Для согласования реверсивного сигнала НЗ с нереверсивной регулировочной характеристикой УО служит переключатель характеристик ПХ, управляемый ЛУ (ключи «В» и «Н»).
Токоограничение в данной системе регулирования обеспечивается за счет ограничения выходного напряжения регулятора RС резистором R22, который определяет максимальную уставку тока привода.
Узел зависимого токоограничения УЗТ обеспечивает снижение уставки токоограничения в функции скорости. Сигнал на вход УЗТ поступает с тахогенератора ВR1 через делитель R2, R7. Резистором R42 (при введенном R22) устанавливается максимальное значение уставки токоограничения.
С целью более точной апроксимации зависимости тока двигателя от частоты вращения, последняя разбивается на два участка с регулируемой точкой перегиба В.
Блок защит осуществляет блокирование выхода регулятора РС и снятие управляющих импульсов при включении и срабатывании защит.
Блокирование выхода РС транзистором УЗЗ осуществляется в функции изменения скорости тахогенератора и включения контакта «Работа»: при равенстве нулю сигналов задания скорости и тахогенератора выход РС шунтируется УЗЗ.
При реверсировании сигнала и зад реверсируется сигнал на входе ЛУ (с НЗ). Ток в силовой цепи начинает спадать. Как только с выхода ДП на вход ЛУ поступит сигнал, разрешающий переключение (ток равен нулю), с выхода Л У поступит сигнал разрешения выдачи импульсов и р на ФИ1...ФИЗ и БЗ.
При этом с БЗ на управляющий орган УО поступает сигнал, переводящий углы в а макс.
Данный сигнал поступает на УО с БЗ и при срабатывании одной из защит.
Для улучшения динамических характеристик электропривода на вход УО введена отрицательная связь по току, уровень которой можно менять резистором И69.
Силовая часть блока управления включает тиристорный преобразователь якоря ТПЯ, выполненный по трехфазной мостовой реверсивной схеме и тиристорный преобразователь возбуждения ТПВ, выполненный по однофазной мостовой нереверсивной схеме.
Система регулирования напряжением якоря двигателя аналогична системе управления электроприводом ЭПУ 1...П.
Задающий сигнал Изад с задатчика скорости И1 поступает на вход регулятора скорости РС через задатчик интенсивности ЗИ разгона электропривода, который может регулировать длительность разгона электропривода с помощью сменного резистора И5 до 10 с.
Токоограничение в данной системе обеспечивается за счет ограничения выходного напряжения РС резистором Я25.
В целом система регулирования данного электропривода выполнена однозонной (Ф=const). Однако, в целях унификации с двухзонным приводом источник питания обмотки возбуждения выполнен регулируемым на тиристорном и диодном модулях. Это позволяет иметь регулирование и стабилизацию тока возбуждения двигателя без существенных затрат на систему управления. Такое решение, кроме стабилизации тока возбуждения, позволяет при необходимости (например, для быстрых перемещений механизма) осуществить регулирование скорости двигателя с ослаблением поля по входу «Регулирование Ф».
Задающий сигнал і в. зад. на РТВ подается через резистор И80 с переменного резистора R78. Сигнал обратной связи по току поступает с датчика тока ДТВ через резистор И81.
Управляющий сигнал с РТВ поступает на формирователь импульсов возбудителя ФИВ, где происходит его сравнение с пилообразным напряжением, поступающим с одного из каналов СИФУ якоря (с ФИ1). Резисторами И27 и И28 выставляются углы αмакс=160 эл. град, и αмин=50 эл. град.
Блок защит осуществляет блокирование:
– сигнала на выходе РС;
– управляющих импульсов
Для улучшения динамических характеристик электропривода на вход УО введена отрицательная связь по току, уровень которой можно менять резистором.
Узел соответствия предназначен для выявления соответствия скорости двигателя заданному значению. При достижении скорости заданного значения замыкается контакт реле К1, управляющий приводом подачи.
Структура регулирования электроприводом аналогична однозонному электроприводу с тахогенератором.
Отличие данной схемы состоит в наличие датчика напряжения ДН и датчика ЭДС ДЕ. На вход датчика ДЕ поступают сигналы с ДН, пропорциональный напряжению на якоре двигателя, и с ПХ2, пропорциональный току якоря. Узел ПХ2 осуществляет преобразование нереверсивного сигнала ДТЯ в реверсивный сигнал.
Датчик ДЕ настраивается таким образом, чтобы при застопоренном двигателе под нагрузкой среднее значение выходного сигнала ДЕ было равно нулю. Обязательной является гибкая связь по ЭДС С58, Р116.
С целью обеспечения высокого быстродействия и универсальности для реверсивного двухзонного электропривода принята схема с реверсом тока якоря и нереверсивным однозонным возбудителем.
Система регулирования содержит два канала регулирования: канал регулирования напряжения якоря и канал регулирования потока и ЭДС двигателя.
Канал регулирования потока и ЭДС двигателя содержит задатчик тока возбуждения резистор R78, ПИ-регулятор тока возбуждения РТВ, ПИ-регулятор ЭДС РЕ с задатчиком ЭДС R82. На входе РЕ, сравниваются сигнал задания ЭДС Е зад и обратной связи по напряжению двигателя. Последний образуется выпрямлением при помощи выпрямителя В2 выходного сигнала ДН. Электропривод выполнен по зависимому от напряжения на якоре принципу регулирования скорости.
Данный привод обеспечивает работу двигателя в первой зоне при постоянном магнитном потоке и во второй зоне регулирования при постоянной мощности двигателя.
Узел зависимого токоограничения УЗТ действует в функции напряжения тахогенератора поступающего на вход узла через делитель R94, R95 и уменьшает уставку токоограничения для улучшения коммутации двигателя в режиме ослабления поля.
Дата публикования: 2015-11-01; Прочитано: 1195 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
