 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Общая классификация телемеханических систем
|
|
Отличительной особенностью телемеханических систем является наличие в них устройств для передачи информации на значительные расстояния с целью управления удаленными объектами или их контроля. Для правильного функционирования автоматических систем необходимо, чтобы информация в процессе передачи претерпевала наименьшие искажения. В условиях территориальной разобщенности частей системы и действия помех возникают затруднения в удовлетворении этого требования. Для решения задачи передачи информации сформировалась особая область науки и техники - телемеханика, предметом которой является разработка методов и технических средств передачи и приема информации с целью управления и контроля.
По выполняемым функциям и виду передаваемой информации телемеханические системы подразделяют на:
системы телеуправления, обеспечивающие управление на расстоянии отдельными объектами, оборудованием или целыми производственными комплексами;
системы телесигнализации, осуществляющие контроль на расстоянии за состоянием или положением управляемых или контролируемых объектов;
системы телеизмерения - предназначенные для измерения на расстоянии различных физических величин (тока, напряжения, давления, скорости и т. д.);
системы передачи данных - обеспечивающие передачу на расстояние цифровой и другой информации о работе производственных объектов для использования ее в вычислительных управляющих машинах;
комбинированные системы, объединяющие некоторые из перечисленных выше систем.
Телемеханические системы включают системы передачи информации (СПИ)-совокупность технических средств, которая обеспечивает передачу информации от источника к исполнительному устройству. Система передачи информации (рис. 2.7,а) состоит из источника сообщения (ИС), кодирующего устройства (КУ), которое формирует из сообщения А сигнал; модулятора (М), преобразующего сигнал в вид, удобный для передачи по линии связи (ЛС) - физической среды, по которой передаются сигналы; демодулятора (Д), преобразующего сигнал в первоначальный вид; декодирующего устройства (ДУ), формирующего из сигнала сообщение Б. По принятому сообщению должен быть сформирован сигнал реализации (исполнения). Эту задачу решает отдельное устройство - формирователь сигнала реализации (ФСР), воздействующий на исполнительное устройство (ИУ).
Назначение системы - передать сообщение от источника к получателю, причем сообщение Б, принятое получателем, должно соответствовать переданному сообщению А. При передаче от источника к получателю сообщение подвергается искажениям из-за помех. Помехой называется постороннее возмущение в СПИ, действие которого приводит к несоответствию переданной и принятой информации. В составе рассмотренной СПИ имеется один источник информации и одно устройство ее реализации. В реальных условиях в СПИ часто входит несколько самостоятельных источников сообщения. В этом случае передачу сигналов каждого источника можно осуществить по своей линии связи. Такое решение не всегда целесообразно, так как сооружение большого числа линий требует больших затрат. Если же передавать сигналы разных источников по одной линии связи, возникает необходимость в решении следующей задачи: обеспечить прохождение сигналов каждого источника по своему независимому каналу, созданному в единой линии связи.
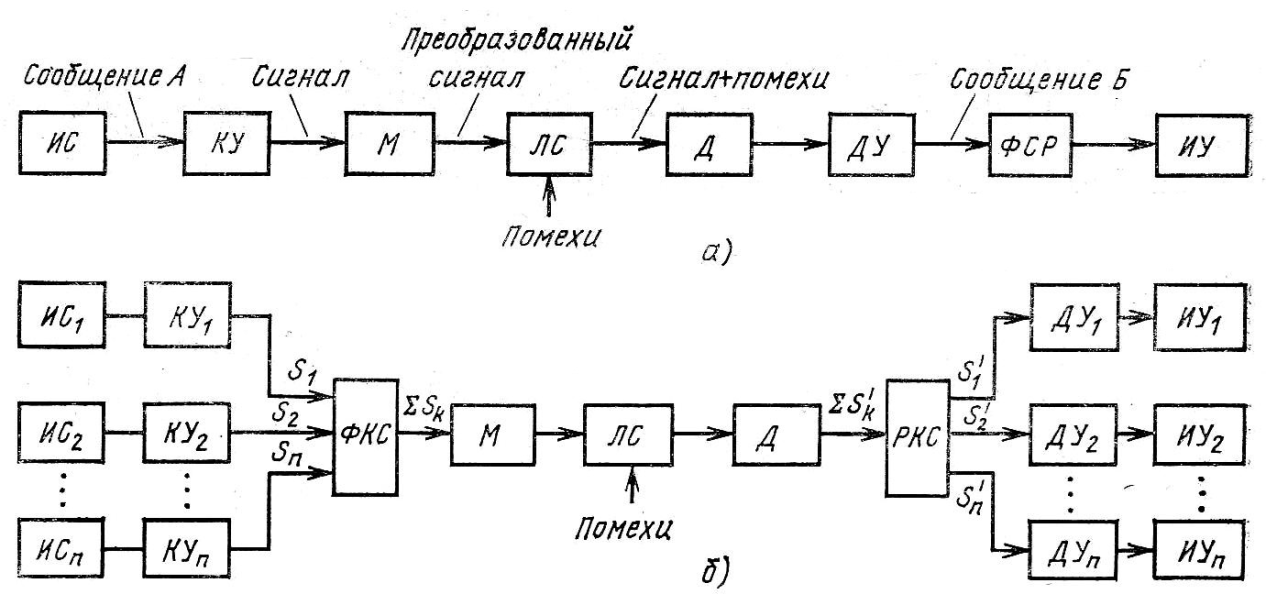
Рис. 2.7. Функциональная схема одноканальной (а) и многоканальной (б) системы передачи информации.
Системы передачи информации, в которых сигналы разных источников сообщений передаются по отдельным каналам, называются многоканальными, а совокупность технических устройств, обеспечивающих независимую передачу сигналов от разных источников сообщений по одной линии связи, образует канал связи. В многоканальных системах (рис. 2.7,б) кроме указанных ранее устройств на передающей стороне необходимо иметь устройство, формирующее канальный признак - формирователь канальных сигналов (ФКС), а на приемной стороне - разделитель канальных сигналов (РКС),
Управление удаленными объектами осуществляет оператор из центрального диспетчерского пункта (ДП). На ДП находится диспетчерский полукомплект приемо-передающей аппаратуры, а непосредственно у управляемых или контролируемых объектов размещаются полукомплекты контролируемых пунктов (КП). Управляемые или контролируемые объекты размещаются территориально либо в одном месте—сосредоточенные объекты (рис. 2.8,а), либо небольшими группами на значительных расстояниях друг от друга- рассредоточенные объекты (рис. 2.8,б). При сосредоточенных объектах на все объекты устанавливается общий комплект КП, связь которого с объектами осуществляется с помощью местных систем дистанционного управления. При рассредоточенных объектах около каждого из них устанавливается свой полукомплект аппаратуры.
Телемеханические системы могут быть замкнутыми, когда устройства телеуправления (ТУ) и телесигнализации (ТС) или телеизмерения (ТИ) объединены в единую систему с обратной связью, или разомкнутыми, когда используются только устройства ТУ, или ТС, или ТИ. Системы ТУ самостоятельно применяются крайне редко — обычно в тех случаях, когда за управлямыми объектами можно наблюдать визуально: например, управление положением стрелы подъемного крана. Замкнутые системы называют системами ТУ-ТС, или ТУ-ТИ, или ТУ-ТС-ТИ. Устройства ТС обеспечивают передачу и прием на диспетчерском пункте сигналов о состоянии контролируемых объектов
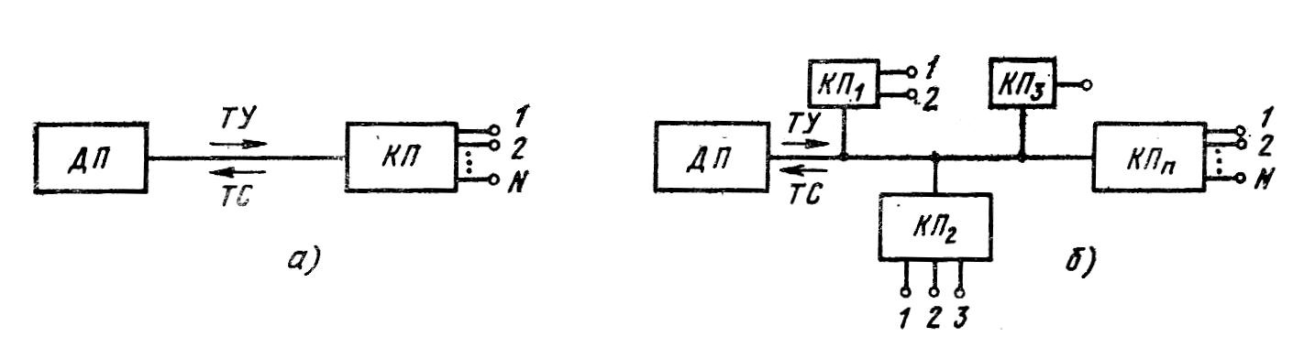
Рис. 2.8. Виды территориального распределения объектов телемеханики
а)- сосредоточенное разделение объектов
б)- рассредоточенное распределение объектов
Дата публикования: 2015-09-17; Прочитано: 1873 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
