 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Решение. На рисунке 2.14 показан входной сигнал х(t) , задержанный относительно него второй сигнал x(t+t0) и сигнал рассогласования v(t).Интегратор представим
|
|
На рисунке 2.14 показан входной сигнал х(t), задержанный относительно него второй сигнал x(t+t0) и сигнал рассогласования v(t). Интегратор представим линейной, инвариантной (неизменной) относительно времени системой, которая характеризуется импульсной характеристикой h(t) (реакция системы при подаче на ее вход единичного импульса), которая изображена на рисунке 2.15,а. Отклик системы на произвольный сигнал v(t), поданный на ее вход, является сверткой v(t) c h(t), что записывается следующим образом:
 (2.25)
(2.25)
Независимой переменной в интеграле свертки является  . На рисунке 2.15,б показаны bceu функции v() и h(- ). Функция h(- ) получается отображением h() относительно оси =0. Член h(t- ) представляет функцию h(- ), смещенную на t секунд вдоль положительного направления оси . На рисунке 2.15,в показана функция h(t1- ). Значение интеграла свертки в момент времени t=t1 вычисляем как площадь под кривой произведения v() на h(t1- ) (см. рисунок 2.15,г). Интеграл свертки в момент t=t2 равен заштрихованной области на рисунке 2.15,д. На рисунке 2.15,е приведен график отклика i(t) на выходе схемы при квадратном импульсе на входе. Каждое вычисление интеграла свертки для некоторого момента времени ti дает одну точку i(ti) графика на рисунке 2.15,е.
. На рисунке 2.15,б показаны bceu функции v() и h(- ). Функция h(- ) получается отображением h() относительно оси =0. Член h(t- ) представляет функцию h(- ), смещенную на t секунд вдоль положительного направления оси . На рисунке 2.15,в показана функция h(t1- ). Значение интеграла свертки в момент времени t=t1 вычисляем как площадь под кривой произведения v() на h(t1- ) (см. рисунок 2.15,г). Интеграл свертки в момент t=t2 равен заштрихованной области на рисунке 2.15,д. На рисунке 2.15,е приведен график отклика i(t) на выходе схемы при квадратном импульсе на входе. Каждое вычисление интеграла свертки для некоторого момента времени ti дает одну точку i(ti) графика на рисунке 2.15,е.
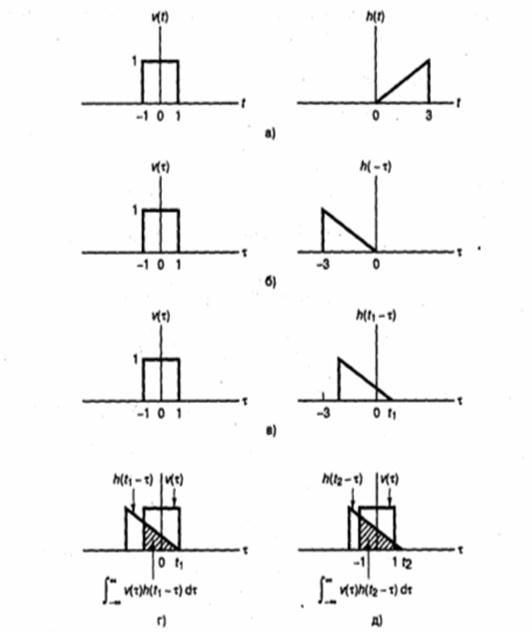

Рисунок 2.15
Дата публикования: 2014-10-17; Прочитано: 627 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
