 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Y1x2x3y4x5y6
|
|
Подставив сюда значения углов поворота в шарнирах, отсчитываемые от начальных положений соответствующих координатных осей звеньев, как это показано на рисунке, и произведя соответствующие вычисления, определим матрицу ориентации схвата.
Подчеркнем, что матрицы элементарных поворотов расставляются в порядке следования поворотов от неподвижного звена манипулятора. Соответствующие матрицы ориентации для остальных звеньев выглядят аналогичным образом, но несколько проще.
Для определения координат центров кинематических пар Аi воспользуемся формулой (8.8). Ее последовательное применение к соответствующим парам звеньев даст следующее выражение для определения координат некоторой точки S, принадлежащей схвату манипулятора:
RS=R1+t2r2+t3r3++t4r4++t5r5++t6r6.
Соответствующие выражения для остальных точек выглядят аналогично.
Угловые скорости и угловые ускорения звеньев находятся на основе последовательного применения формул (8.11) и (8.12), а линейные скорости и ускорения центров кинематических пар - на основе формул (8.9) и (8.10). Подробная запись этих выражений достаточно трудоемка, поэтому здесь она не приводится. Формулы рассчитаны на применение вычислительной техники.
8.8. Обратная задача кинематики манипулятора
Приведенные выше рекуррентные соотношения (8.8), (8.9), (8.10) позволяют определить положение, скорость и ускорение любых точек и звеньев манипулятора, если заданы обобщенные координаты и их производные по времени. Рассмотрим обратную задачу: определим обобщенные координаты, их скорость и ускорение, если задано движение исполнительного звена манипулятора — кисти, несущей захватное устройство или инструмент.
В общем случае положение исполнительного звена задается шестью эйлеровыми координатами: координатами полюса, в качестве которого может быть задан центр масс захватного устройства вместе с объектом манипулирования, и тремя углами, определяющими ориентацию захватного устройства связанной системы в неподвижном пространстве. Возникает шестимерная обратная задача по определению шести обобщенных координат.
Целесообразно максимально снизить размерность задачи. Для этого следует выяснить движение точек, максимально близкорасположенных к началу кинематической цепи. Такая возможность обычно существует благодаря тому, что присоединение кисти робота к несущей руке можно смоделировать сферической кинематической парой. Тогда, рассматривая кисть как твердое тело, осуществляющее предписанное пространственное движение, по известным формулам кинематики определим движение центра сферической пары. Задача стала трехмерной: требуется определить три обобщенные координаты для трехзвенной кинематической цепи позиционирующих движений по заданным координатам исполнительной точки. Для этого необходимо решить векторное уравнение
F(q1,q2,q3) = RA0 – RA (q1, q2, q3) = 0, (8.13)
где F = [ f1 (q1 ), f2 (q2), f3 (q3) ], R A0 — заданный радиус-вектор точки; R A— вектор-функция положения точки, найденная из решения прямой задачи.
Для численного решения уравнения (8.13) можно применить метод Ньютона. Предположим, что найдено p-тое приближение искомых координат qp = [ q1p, q2p, q3p ]. Тогда следующее приближение можно представить в виде
q(p+ 1) = q(p) + ε,
где ε — поправка.
Поправка ε находится из линейной системы уравнений
Wε = - R A (q(p)), (3.14)
где W — матрица Якоби системы скалярных функций  :
:
Матрица Якоби вычисляется при значениях qi, соответствующих p-му приближению. При исследовании движения на границах рабочей зоны могут возникнуть затруднения в связи с вырождением матрицы W, а значит, и невозможностью решения линейного уравнения (8.14).
Для ортогональных манипуляторов существует возможность составления алгоритма решения обратной задачи, который более эффективен, чем метод последовательных приближений
Решение обратной задачи кинематики для манипуляторов с прямоугольной, цилиндрической и сферической системами координат не вызывает затруднений. Анализируя схемы на рис. 8.5, 8.6, 8.7, можно вычислить обобщенные координаты по заданному положению исполнительной точки S.
Для манипулятора с прямоугольной системой
с цилиндрической системой
со сферической системой
Дифференцируя эти соотношения можно получить формулы для скорос-
тей и ускорений.
Для манипулятора с шарнирной схемой задача решается несколько
сложнее. (Подробнее можно прочитать в книге «Механика промыш-
ленных роботов и манипуляторов с электроприводом» Л.А. Борисенко,
А.В. Самойленко. – Мн. 1992 г.)
8.9. Предварительный силовой расчёт манипулятора
Предварительный расчёт манипулятора можно вести по упрощенной схеме кинетостатического расчёта, считая звенья геометрическими с сосредоточенными точечными массами, помещёнными в центрах их масс.
На этапе предварительного расчёта манипулятора производится ориентировочный расчёт мощности двигателя, определяется быстродействие манипулятора. При расчёте мощности двигателя учитываются такие параметры, как масса переносимого груза, максимальный радиус вылета руки (для телескопической руки), предельные перемещения груза по координатам, номинальная скорость движения. Расчёт ведется для периода неустановившегося движения, каким является период пуска. Рассмотрим, например, вращательное движение модуля поворота руки шарнирного манипулятора, схема которого представлена на рис.8.23.

Рис.8.23. Манипулятор со статически уравновешенной рукой
В период пуска момент двигателя складывается из статического момента, создаваемого весом руки, рабочего органа и переносимого груза, и динамического момента, связанного с неравномерностью движения по координате φ: М =Мст+ Мдин.
В случае статически уравновешенной руки Мст определяется только весом груза и радиусом размещения его относительно шарнира А. Вопрос уравновешивания руки имеет важное практическое значение как для облегчения управления при обучении, так и для энергетики манипулятора.
Известно, что для статической уравновешенности необходимо, чтобы при изменении положения системы центр масс оставался неподвижным. Эта задача для звена, совершающего вращательное движение, решается путём добавления к нему дополнительной массы (так называемого дебаланса) или таким распределением массы звена, чтобы центр его масс оказался в центре шарнира. Этот приём непригоден при телескопической руке, так как из-за движения в поступательной паре происходит изменение положения центра масс и, следовательно, необходимо непрерывно корректировать положение дебаланса, что трудновыполнимо. С целью статического уравновешивания руки манипулятора наиболее массивные его части, к которым относятся двигатели с редукторами, располагаются за шарниром, как это показано на рис.8.23, с таким расчётом, чтобы центр масс оказался в точке А. Перераспределение веса может увеличить динамическую неуравновешенность. Поэтому для статического уравновешивания руки применяются также специальные пружинные или пневматические уравновешивающие устройства.
Даже при полной статической уравновешенности руки остаётся статический момент от неуравновешенной массы переносимого груза. С учётом остаточной статической неуравновешенности
Мст= kCmgrScosα,
где kC – коэффициент статической неуравновешенности руки, согласно практическим данным, принимается 1,5; m – масса груза; rS – постоянный радиус центра масс груза; α – угол наклона руки к горизонту.
Динамический момент Мдин, преодолеваемый двигателем в случае вращательного движения вокруг оси:
Мдин= –Jε,
где J – момент инерции руки совместно с переносимым грузом относительно центра вращения; ε – угловое ускорение.
Эту же формулу можно представить в виде
Мдин= kДmgrSε,
где kД– коэффициент динамической неуравновешенности руки, учитывающий момент инерции вращающихся частей привода и самой руки без груза; по данным для существующих конструкций роботов типа обычно kД = 1,8–2,3.
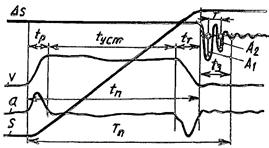
Рис. 8.24.Осцилограмма параметров переносного движения руки
Динамический момент зависит в первую очередь от углового ускорения ε. Выбор допустимого значения е следует производить на основании имеющегося опыта эксплуатации роботов. На рис. 8.24 представлена осциллограмма переносного движения руки робота. Она включает период разгона tр, установившегося движения tуст, торможения tт. На рисунке 8/24 v – скорость движения, a – ускорение, S – перемещение, ∆S – малые упругие колебания руки, Тп – полное время движения, включающее время успокоения рабочего органа.
Закон изменения скорости обычно принимается трапецеидальным, тогда разгон и замедление происходят с постоянным ускорением. Длины пути разгона и торможения принимают обычно равными и составляющими некоторую часть общего перемещения:
φр= φт= kφφ,
где kφ – коэффициент быстродействия.
Табл.8.1. Предельные параметры перемещений руки человека
| Вид движения | Рабочий ход, рад | Скорость, рад/с | Ускорение, рад/с2 | Мощность, Вт |
| Захват Вращение кисти Изгиб кисти Вращение предплеплеча Изгиб предплечья Вращение плеча Изгиб плеча | 1,5 1,5 1,5 1,5 |
Чем меньше kφ, тем быстрее нарастает скорость, а следовательно, и увеличиваются динамические нагрузки на звенья. С целью ограничения максимальных ускорений до значений ε = 10–20 рад/с2, что для манипулятора средних размеров соответствует линейным ускорениям 5–10 м/с2, при ориентировочном расчёте можно принимать kφ = 0,1–0,2.
Динамическое совершенство руки манипулятора ещё очень невысокое. В табл.8.1 приведены среднестатистические предельные возможности перемещения руки человека.
Путь разгона для принятого закона равноускоренного движения связан с продолжительностью движения и угловой скоростью зависимостями
φр= ε tр2/2, φр= ω2 / (2ε).
Увеличение быстродействия манипулятора приводит к росту динамической составляющей момента, поэтому возникает задача оптимизации параметров быстродействия.
Мощность привода вращательного движения передачи двигатель – исполнительный орган определяется по формуле
N = Mω / η,
где η – общий КПД передачи; в зависимости от вида редуктора и значения передаточного отношения η = 0,3 – 0,8.
Двигатель должен обладать достаточной мощностью для обеспечения надёжной работы в переходных режимах.
Контрольные вопросы
1. Что понимается под словом робот в широком смысле слова?
2. Как классифицируются манипуляционные роботы?
3. Начертите функциональную схему автоматического робота.
4. Что такое промышленный робот?
5. По каким признакам квалифицируются промышленные роботы?
6. Охарактеризуйте назначение глобального, регионального и локального движения робота.
7. Сколько степеней свободы должен иметь полный манипулятор?
8. Как реализуется кинематическая цепь региональных движений?
9. Дайте сравнительную оценку манипуляторов с прямоугольной, цилиндрической, сферической системами координат.
10. Нарисуйте схему шарнирного робота.
11. Как обычно осуществляется кинематическая цепь ориентирующих движений?
12. Как задается ориентация тела в пространстве?
13. Запишите матрицы элементарных поворотов вокруг осей x, y, z.
14. В чем состоит прямая задача кинематики манипулятора?
15. В чем состоит обратная задача кинематики манипулятора?
16. В чем состоит предварительный силовой расчет манипулятора?
17. Как определить мощность привода для вращательного движения уравновешенной руки манипулятора?
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 4
1. ОСНОВЫ СТРУКТУРНОГО АНАЛИЗА МЕХАНИЗМОВ.
1.1. Основные понятия курса теории механизмов, машин и
манипуляторов 11
1.1. Виды и классификация кинематических пар 12
1.2. Кинематическая цепь. Кинематическое соединение 14
1.3. Число степеней свободы механизма 15
1.4. Классификация плоских механизмов с низшими парами 17
1.5. Разновидности четырехзвенных рычажных механизмов 18
1.6. Зубчатые, кулачковые, фрикционные механизмы 20
2. КИНЕМАТИКА МЕХАНИЗМОВ
2.1. Задачи кинематики механизмов 23
2.2. План положений механизма 23
2.3. Основные кинематические соотношения 24
2.4. Метод планов скоростей и ускорений
План скоростей шарнирного четырехзвенника 27 2.5. План ускорений шарнирного четырехзвенника 29
2.6. Планы скоростей и ускорений кулисного механизма 30
2.7. Метод кинематических диаграмм 35
2.8. Аналитический метод исследования
открытой кинематической цепи 37
2.9. Кинематическое исследование рычажных механизмов
с замкнутыми цепями 38
2.10. Обобщенные координаты, уравнения связей,
математическая модель пространственной кинематической
цепи 43
3. ДИНАМИЧЕСКИЙ АНАЛИЗ МАШИН И МЕХАНИЗМОВ
3.1. Задачи динамики машин 46
3.2. Классификация сил в механизмах 46
3.3. Сила инерции 47
3.4. Силы инерции в поступательном, вращательном и сложном движении 52
3.5. Силовое исследование механизмов методами кинетостатики 54
3.6. Условие статической определимости кинематической цепи 55
3.7. Метод планов сил 56
3.8. Метод рычага Жуковского 58
3.9. Аналитический метод силового исследования 59
3.10. Задача уравновешивания ротора 59
3.11. Статическая неуравновешенность ротора 60
3.12. Моментная неуравновешенность ротора 61
3.13. Полное уравновешивание ротора с известным
расположением масс 62
3.14. Балансировка на машинах 63
3.15. Уравновешивание механизмов 63
3.16. Силы трения в механизмах. Законы трения 64
3.17. Трение в поступательной паре 65
3.18. Трение во вращательной паре 67
3.19. Трение в высших парах 68
3.20. Динамический анализ механизмов. Приведение сил и масс 68
3.21. Уравнение движения машины в дифференциальной форме 70
3.22. Пример динамического исследования колодочного тормоза 71
3.23. Численное решение дифференциального уравнения 71
3.24. Периоды работы машины 72
3.25. Регулирование неравномерности хода машины 73
3.26. Автоматические регуляторы скорости 75
3.27. Одномассовая упругая модель механизма 76
3.28. Характеристики упругих звеньев 80
4. СИНТЕЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
4.1. Задачи синтеза механизмов 85
4.2. Структурный синтез рычажных механизмов 85
4.3. Синтез четырехзвенных механизмов
по заданным положениям звеньев 87
4.4. Синтез механизмов по коэффициенту производительности 88
4.5. Учет угла давления при синтезе механизмов 89
4.6. Направляющие механизмы. Механизмы с выстоями 90
4.7. Шаговые механизмы. Мальтийские механизмы 91
4.8. Механизмы пантографов 92
4.9. Синтез механизмов методами оптимизации 93
4.10. Синтез сферических рычажных механизмов 95
5. СИНТЕЗ ЗУБЧАТЫХ МЕХАНИЗМОВ
5.1. Классификация зубчатых механизмов 98
5.2. Понятие о центроидных механизмах 99
5.3. Основной закон зацепления 100
5.4. Эвольвента окружности, построение и свойства 101
5.5. Уравнение эвольвенты в полярных координатах 102
5.6. Эвольвентное зацепление 103
5.7. Изготовление зубчатых колес 107
5.8. Исходный контур 104
5.9. Элементы нулевого зубчатого колеса 105
5.10. Нарезание зубчатых колес со смещением 106
5.11. Влияние смещения на профиль зуба 107
5.12. Подрезание, интерференция, заострение 107
5.13. Построение картины зацепления 109
5.14. Коэффициент перекрытия 109
5.15. Толщина зуба по окружности произвольного радиуса 111
5.16. Геометрический расчет зубчатой передачи 111
5.17. Блокирующие контуры 112
5.18. Косозубые колеса 113
5.19. Другие виды зацепления 114
5.20. Пространственные зубчатые передачи 115
5.21. Передаточное отношение и передаточное число 117
5.22. Расчет рядовой коробки передач 118
5.23. Планетарные зубчатые механизмы 119
5.24. Аналитический метод определения передаточного
отношения и угловых скоростей планетарных механизмов 120
5.25. Кинематический анализ автомобильного дифференциала 121
5.26. Замкнутые дифференциальные механизмы 122
5.27. Дифференциальные коробки передач 123
5.28. Графический метод анализа планетарных механизмов 123
5.29. Условия соосности, соседства, сборки планетарных механизмов 124
5.30. Пример синтеза планетарного механизма 126
5.31. Волновая передача 127
5.32. Планетарные механизмы робототехнического назначения 128
6. СИНТЕЗ КУЛАЧКОВЫХ МЕХАНИЗМОВ
6.1. Виды кулачковых механизмов 133
6.2. Заменяющие механизмы 134
6.3. Элементы профиля кулачка 135
6.4. Выбор закона движения толкателя 136
6.5 Изготовление кулачков 137
6.6. Анализ кулачковых механизмов 137
6.7 Угол давления и его связь с размерами кулачка 138
6.8 Определение основных размеров кулачкового
механизма с коромыслом 140
6.9 Определение размеров кулачкового механизма
с тарельчатым толкателем 142
6.10 Построение профиля кулачка по заданному
закону движения толкателя 144
6.11 Динамический анализ кулачковых механизмов 147
7 ОСНОВЫ ТЕОРИИ МАШИН-АВТОМАТОВ
7.1. Основные понятия теории машин-автоматов 152
7.2. Аналоговые системы управления 152
7.3. Числовое программное управление 155
7.4. Система управления по времени 156
7.5. Основы синтеза логических систем управления 157
7.6. Синтез избирательной системы управления 159
8. РОБОТЫ И МАНИПУЛЯТОРЫ
8.1. Общие сведения о роботах и манипуляторах 162
8.2. История развития робототехники 163
8.3. Классификация роботов 164
8.4. Промышленные роботы 166
8.5. Структура и геометрические характеристики манипуляторов 170
8.6. Задание ориентации твердого тела 175
8.7. Кинематика манипулятора 179
8.8. Обратная задача кинематики манипулятора 184
8.9. Предварительный силовой расчет манипулятора 185
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Активная линия зацепления 109
Анкерный механизм 91
Автоматизированный робот 165
Автоматическая линия 152
Асинхронный кардан 96
Блок управления 152
Блок-схема системы управления 160
Биотехнический робот 164
Входное звено 12 Выходное звено 12
Вариатор 21
Вращательное движение 25
Волновая передача 21
Волновая зубчатая передача 127
Высшие пары 13
Головка зуба 104
Грейферный механизм 91
Глобальные движения 170
Делительная прямая 104
Делительная окружность 105
Движущая сила 46
Динамическая эквивалентность 68
Динамика механизмов 46
Деталь 11
Двухкривошипный механизм 18
Дифференциал 12
Двухкоромысловый механизм 18
Диада 16
Диалоговое управление 165
Заострение зуба 108
Звено приведения 68
Замкнутая кинематическая цепь 14
Зубчатый механизм 20
Зубчато-рычажный механизм 20
Закон Ньютона 48
Зубчатый ряд 20
Зона обслуживания 175
Зубчатое колесо 98
Зубчатая передача 98
Зубчатый механизм 98
Избыточные связи 16
Инволюта 102
Исходный контур 104
Интерференция 108
Информационная машина 11
Инерциальная система отсчета 47
Исплнительное устройство 175
Исполнительный орган 152
Информационная система 166
Исполнительная система 166
Интеллектный робот 167
Кинематическая схема механизма 12
Конструктивная схема механизма 12
Кинематическое соединение 14
Класс группы 18 Класс механизма 18
Кисть робота 174
Коэффициент смещения 106
Кинематическая пара 12
Кривошипно – коромысловый механизм 18
Кривошип 18 Коромысло 18
Крестовое соединение 15
Кулисный механизм 17
Кривошипно-ползунный механизм 17
Камень 17
Крестовая муфта 17
Кулачковый механизм 20
Коромысло 20
Кинематика 23
Круговое поступательное движение 25
Кинематическая теорема Кориолиса 48
Крайнее положение механизма 88
Коэффициент производительности 88
Кулачок 133
Командное управление 164
Копирующий робот 164
Кардан 95
Коэффициент перекрытия 109
Локальные движения 170
Мультипликатор 117
Мертвое положение 86
Механизм косой шайбы 96
Механизм косой шайбы 96
Моментная неуравновешенность 61
Машина 11
Машина-автомат 11
Манипулятор 11
Механизм 14
Метод преобразования координат 37
Механизм 1-го класса 16
Механизм с качающейся кулисой 17
Механизм Ольдгейма 17
Механизм с вращающейся кулисой 17
Метод преобразования координат 23
Метод кинематических диаграмм 35
Механизм 11
Масштабный коэффициент 23
Метод засечек 23
Метод кинетостатики 54
Механизм свободного хода 91
Мальтийский механизм 91
Матрица Якоби 184
Манипулятор 166
Машина-автомат 152
Редуктор 117 Передаточное отношение 117
Передаточное число 117
Условие соосности 125 условие сборки 125
Условие соседства 125
Эвольвента 101 Угол профиля эвольвенты 102
Эвольвентная функция 102
Начальная окружность 103 Способ копирования 103
Способ обкатки 103
Теоретический исходный контур 104
Шаг рейки 104 Толщина зуба 104
Ширина впадины 104
Начальная прямая 104
Ножка зуба 104 Производящий исходный контур 104
Смещение 106
Угол перекрытия 110
Одномассовая динамическая
модель механизма 68
Существование кривошипа 86 Теорема Грасгофа 86
Направляющие механизмы 90
Прямой ключ Гука 96 Синхронный кардан 96 Универсальный кардан Рзеппа 96
Уравновешивающая сила 56 Условие статической
определимости системы 55
Статическая неуравновешенность 60
Самоторможение 66
Прямая задача динамики 46 Обратная задача динамики 46
Энергетическая машина 11
Технологическая машина 11 Транспортная машина 11
Звено 11
Стойка 11
Промежуточное звено 12
Элемент кинематической пары 12
Структурная схема механизма 12
Обобщенная координата 14 Кинематическая цепь 14
Плоская кинематическая цепь 14
Пространственная кинематическая цепь 14
Открытая к4инематическая цепь 14
Начальное звено 16
Шарнирный четырехзвенник 18
Сложное движение 26 Переносная скорость 26
Относительная скорость 26
Фрикционный механизм 21
Траектория 24
Шатунная кривая 24 Плоское движение 24
Поступательное движение 24
Теорема Жуковского 58 План скоростей механизма 28
Свойство подобия 28 Плоские кинематические пары 13
Пространственные кинематические пары 13
Низшие пары 13
Число степеней свободы 15
Обобщенные координаты 15
Степень подвижности 15
Формула Сомова-Малышева 15
Формула Чебышева 15
Шарнир Гука 15
Пространственный семизвенник 16
Рычажные механизмы 16
Структурная (ассуровская) группа 16
Трехповодок 16
Шатун 17
Тангенсный механизм 17
Синусный механизм 17
Планетарный механизм 20
Толкатель 20
План положений механизма 23
Прямолинейное движение 25
Переносное ускорение 27
Относительное ускорение 27
Правило Жуковского 27
План скоростей звена 27
План ускорений звена 29
Свойство подобия плана ускорений 29
Прямая задача кинематики 38
Сила полезного сопротивления 47
Сила вредного сопротивления 47
Сила тяжести 47
Сила реакции в кинематической паре 47
Сила инерции 47
Принцип Даламбера 48
Центростремительная сила 49
Центробежная сила 49
Шаговый механизм 91
Храповый механизм 91
Региональные движения 170
Угол сервиса 174
Коэффициент сервиса 174
Рабочий орган 175
Рабочее пространство 175
Рабочая зона 175
Погрешнгсть позиционирования 175
Погрешность отработки траектории 175
Переносная степень подвижности 170
Ориентирующая степень подвижности 171
Управляющая система 166
Промышленный робот 166
Робот 1-го поколения 166
Робот 2-го поколения 167
Робот третьего поколения 167
Рабочая зона манипулятора 168
Программное управление 169
Позиционное управление 169
Шаговый злектродвигатель 155
Реле 158
Логический элемент 158
Избирательная система управления 159
Робот 162
Сервоуправление 163
Интерактивный робот 165
Супервизорное управление 165
Рядовая зубчатая передача 118
Окружность минимального радиуса 135
Выстой 135
Цикл 152
Сервоклапан 154
Система управления по упорам 154
Числовое программное управление 155
Шарнир Гука 95
Универсальный шарнир 95
Передаточное отношение 98
Полюс зацепления 109
Теоретическая линия зацепления 109
Угол зацепления 109
Уравнение зацепления 112













Учебное издание
Борисенко Леонид Анатольевич
ТЕОРИЯ МЕХАНИЗМОВ, МАШИН И МАНИПУЛЯТОРОВ
Редакторы Е.А.Баранкевич
А.Т. Червинская
Подписано в печать Формат 60x84 1/16. Бумага офсетная. Печать трафаретная.
Усл. печ. л.. Уч.- изд. л.. Тираж экз. Заказ N _______
Издатель и полиграфическое исполнение:
Могилевский государственный технический университет
Лицензия ЛВ N 243 от 22.02.2001 г., лицензия ЛП N 165 от 22.02.2001 г.
212005, г. Могилев, пр. Мира, 43
Дата публикования: 2014-10-25; Прочитано: 872 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
