 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Характеристики двигателя
|
|
Основными величинами для оценки работы двигателя являются эффективная мощность N„ число оборотов л коленчатого вала в минуту, крутящий момент М двигателя и удельный расход g, м
топлива. Зависимость между мощностью и крутящим моментом выражается формулой _lr oiV, г
М = 710,2-^ кГ м.
Удельный расход топлива представляет собой часовой расход топлива, деленный на эффективную мощность:
,ЛЛ°-г/(л. с. «0,
где Gm — часовой расход топлива в кг.
Зависимость эффективной мощности, крутящего момента, среднего эффективного давления и расхода топлива от числа оборотов коленчатого вала двигателя прн любом неизменном поло- женин дроссельного золотника карбюратора называется скоростной характеристикой двигателя. Скоростную характеристику при полном открытии дроссельного заютиика часто называют внешней характеристикой. Скоростные характеристики при любом частичном открытии дроссельного золотника называют частичными скоростными характеристиками.
Как видно из рис. 48, среднее эффективное давление р„ от которого зависит мощность двигателя, прн малом числе оборотов невелико;
затем, по мере увеличения числа оборотов, оно возрастает, достигая своего максимального значения при числе оборотов пм, а затем начинает уменьшаться. Кривая р, является одновременно кривой крутящего момента Л1 в другом масштабе, так как р, и Л/ прямо пропорциональны.
Вид кривой р, обусловливает форму кривой эффективной мощности Nt, которая вначале круто поднимается, затем по мере увеличения числа оборотов растет все медленнее, достигает своего максимального значения при пм и, наконец, начинает идти вниз.
Важными точками скоростной характеристики являются: лт|П — минимальное число оборотов, прн котором двигатель может работать прн пат ноет ью открытом дроссельном золотнике;
л.м твж — число оборотов, соответствующее максимальному среднему эффективному давлению и крутящему моменту; п.х,тшл —число оборотов, соответствующее максимальной мощности.
 Рис. 48. Внешняя характеристика двигателя
Рис. 48. Внешняя характеристика двигателя
|
4 Н»»»«Ц1.«1 ■ Ар. 97
Форма внешней характеристики зависит от сечення и формы" впускного канала, диаметра диффузора карбюратора, размерЦ сечения и подъема клапанов. фаз газораспределения, степени сжатия, а также от длины впускной и выпускной систем, т. с. от тех факторов, от которых зависит коэффициент наполнении при различных числах оборотов; кроме того, форма внешней характеристики зависит от состава рабочей смеси и угла опережении зажигания.
По форме внешней характеристики двигатели разделяют на форсированные и нефорсированные. К форсированным относятся двигатели, которые имеют большие проходные сечении впускной системы и широкие фазы газораспределения, что уменьшает наполнение при работе двигателя на малых числах оборотов и увеличивает его на больших числах оборотов.
Кривая р, (М) таких двигателей (рис. 49) достигает максимума при большом числе оборотов. Такую характеристику имеют двигатели гоночных мотоциклов.
Двигатели с меньшей форсиров- кой (дорожные) обладают более высокими значениями величины рt и М на малых и средних числах оборотов, но меньшей максимальной мощностью и числом оборотов, соответствующим ей.
Форма кривых р, и.М дорожного мотоцикла показывает лучшую приспособленность его к изменяющимся нагрузкам, так как при увеличении нагрузки и снижении числа оборотов крутящий момент такого двигателя не уменьшается, а увеличивается, что позволяет двигаться, не переключая передачи.
Зависимость мощности и удельного расхода топлива от регулировки карбюратора, т. е. от часового расхода топлива при постоянных числах оборотов и наложении дроссельного залотника, называете регулировочной характеристикой двигатели.

| +000 поб/пин |
| Рис. 49. Внешние характеристики двигателей мотоциклов: |
| I — крутящий момент двигателя дорож кого мотоцикл»; t — то ж*, дмгшла гоночного мотоцикл*; J — мощность двигателя дорожпою мотоцикля: * — то же, двигателя гоночного мотоцикла |
Эта характеристика (рис. 50, и) позваляст определить наивыгод нейшую регулировку карбюратора. Регулировочной характери стикой называют также зависнм<хть мощности и удельного расход: от угла опережения зажигания. На регулировочной характеристик* имеется две характерные точки: наименьшего удельного расход! топлива, соответствующая экономическому составу смеси (а — 1,10 + 1,15), и точка, соответствующая наибольшей мощности
| / | |||
| / | |||
| / | |||
| \ | у | ||
| г От HP а) |
| которую получают при несколько обогащенной смеси, когла коэффициент избытка воздуха меньше единицы (а <* I). Зависимость расхода топлива от эффективна мощности (или от р,) при неизменном числе оборотов и переменном положении дрос- N, 41 |
| г/Що) too 300 гоо |
| I г з t мв яс i) Рис. SO. Характеристики двигателя: - pery.i■Родек**: 6 — иагрумчиаг. спр — Э7в ц(л. с. ч); |
| \ | |||||||
| \ | |||||||
| \ | |||||||
| \ | |||||||
| К | ч | ||||||
| Cm | |||||||
| • | |||||||
| f 2 | J 4 |
селыюго заютника называется нагрузочной характеристикой. Эта характеристика позволяет оценить работу двигателя при частичных нагрузках (рис. 50, б).
§ 48. ИСПЫТАНИЯ ДВИГАТЕЛЕЙ
Наиболее важные испытания мотоциклетных двигателей — это испытания для определения их мощности, экономичности и износоустойчивости.
Мощность двигателей определяют на тормозных стендах. В настоящее время применяют электрические, электромагнитные и гидравлические тормошые стенды.
Электрический тормозной стенд состоит из электрогенератора, соединительной муфты, пульта управления, весов, фундаментной плиты и подставки для испытываемого двигателя. Электрогенератор может работать как электродвигатель и как генератор. Статор машины установлен на двух шарикоподшипниках, расположенных в стойках. На статоре укреплен рычаг, опирающийся на весы.
Для пуска испытуемого двигателя электрогенератор включают как электродвигатель от общей сети неременного тока. Якорь машины вращает через муфту коленчатый вил двигателя.
Вращающийся якорь электрогенератора испытывает сопротивление со стороны статора, которое зависит от величины включенной электрической нагрузки, а также сопротивления от трения в подшипниках якоря. Якорь стремится увлечь за собой статор. Так как статор установлен на шарикоподшипниках, сопротивление которых поворачиванию статора ничтожно, то удерживает статор от вращения только реакция р, приложенная на конце рычага и определяемая с помощью весов..Момент силы р на плече длиной 716,2 мм равен крутящему моменту М двигателя. Записав показания весов, т. е. значение силы р, и определив прн помощи тахометра или суммарного счетчика числа оборотов и секундомера число оборотов п якоря электрогенератора, мощность подсчитывают по формуле Мп р -716.2л рп N' в те = 1600. 716.4 = Тооо л-С-
Плечо тормоза выполнено длиной 716,2 мм для упрощения подсчетов.
Ввиду того, что наполнение, а значит, и мощность двигателя зависят от давления и температуры окружающего воздуха, замеренные мощность, крутящий момент и среднее эффективное давление следует привести к нормальным условиям, т. с. к давлению 760 мм рт. cm и к температуре 15° С. Коэффициент ан приведения к нормальным условиям подсчитывают по формуле
760 530 +/.
а" = в7' 646 •
где Вщ — барометрическое давление в мм рт. ст.', /4 — температура окружающего воздуха в ® С.
Приведенная мощность
У=
соответственно
Р,пр = Р,ан и Мяр = Ма„.
Расход топлива определяют при помощи мерного сосуда и секундомера. Мерный сосуд представляет собой нескатько стеклянных шаров, соединенных тонкими стеклянными трубками. На трубках нанесены деления, а объем каждого из шаров, заключенный между делениями, точно измерен. Сосуд прн помощи трехходового крана может быть соединен с основным топливным баком или с карбюратором.
После того как установлен режим работы двигателя, при котором нужно определить расход топлива, трехходовой кран переключают с основного бака на мерный сосуд. Уровень топлива в сосуде начинает понижаться. Когда уровень топлива достигает верхнего деления, включают секундомер; прн достижении топливом нижнего деления секундомер выключают.
Секундомер показывает время, за которое двигатель израсходовал топливо, заключенное в одном из шаров.
Затем двигатель переводят на работу от основного топливного бака.
Часовой расход топлива
Gm = 3.6^= кг/ч,
где V — объем мерного сосуда в см*;
уя — плотность топлива в г/см1-, I — время, за которое было израсходовано топливо, в сек.
Удельный расход топлива
с• «>■
При испытаниях определяют также коэффициент избытка воздуха, температуру отработавших газов и другие параметры — в за- внсююсти от того, какая цель поставлена перед испытанием.
Для определения срока службы двигатель испытывают продолжительное время на различных режимах, которые соответствуют естественным условиям эксплуатации.
С помощью испытаний определяют надежность работы двигателя и износоустойчивость его деталей и механизмов. Кроме того, часто находят внутренние потерн или механический к. п. д. двигателя путем определения мощности, затрачиваемой на трение и насосные потери.
Главе IX
КИНЕМАТИКА И ДИНАМИКА ДВИГАТЕЛЯ
Существует несколько типов крнвошиино-шатунных механизмов. Наиболее распространен аксиальный (простой) крнвошнпио- шатунный механизм, у которого оси цилиндра и коленчатого вала пересекаются. Довольно часто в двухтактных мотоциклетных двигателях применяется дезакснальный (смещенный) крнвошнпио- шатунный механизм, в котором ось цилиндра не пересекает ось коленчатого вала или поршневой палец смещен от диаметральной плоскости цилиндра. Значительно реже, обычно в двухтактных двигателях, крнвошнпно-шатунные механизмы выполняют с прицепным или двойным вильчатым шатуном.
§ 49. КИНЕМАТИКА ПРОСТОГО КРИВОШИПНОШАТУННОГО МЕХАНИЗМА
На рис. 51 дана схема крнвошнпно-шатунного механизма. Определим ход поршня по формуле
S = Lw-f- R*p - RKp cos cu - Lm cos p,
где аж — угол поворота кривошипа;
Lu — длина шатуна;
R„p — радиус кривошипа;
Lm -f RKp — расстояние от оси поршневого пальца до оси коленчатого вала, когда поршень находится в в. м. т.; р — угол между осями шатуна и цилиндра.
Преобразуя выражение, напучим
(cosa. + j^ccep.
Для. облегчения дальнейших рассуждений введем величину
Эта величина характеризует соотношение конструктивных размеров деталей кривошипно шатунного механизма. Дли современна
пых мотоциклетных двигателей величина X находится в пределах
4' г Большее значение относится к двигателям, прн проектировании которых стремились сократить габаритные размеры, например в двигателях с горизонтальными противолежащими цилиндрами, расположенными перпендикулярно продольной оси мотоцикла, для того чтобы уменьшить ширину мотоцикла.
С введением X выражение хода поршня принимает вид
S-/?,p11 + -(cosa. + ~ cos р).
Чтобы в этом выражении избавиться от функций угла р, напишем следующее равенство (рис. 51):
Lu sin 0 RKp sin a,,
откуда
sin рев A, sin a* " cos 6 «= К1 — sin* P —
i
= 11- X«sin'alf = (l - X* sin*a,)1.
Это выражение можно разложить в ряд по биному Ньютона:
cos р = I - -j Л* sin*a, - ~ X* sin4 а„ - Xе sin«а,...
Ввиду того, что значения членов этого ряда порядка выше второго очень малы, можно с достаточной для практики точностью их отбросить и тогда
cos р = I — -J X* sin1 ак.
Посте подстановки и преобразований
S = RKp 11 -f -J- - (cos a, +1 cos _ RkpA,.
Для подсчета величины перемещения поршня в зависимости от угла поворота кривошипа пользуются таблицей (см. табл. 7). в которой приведены значения коэффициента Ак через каждые 10° угла поворота кривошипа при различных значениях X.
Анализируя последнюю формулу, видим, что в в. м. т., когда 0, S 0. В и. м. т. а.. 180 * S 2RKp, так как cos 180
 Рис. 51. Схема простого криьошипно-шатун- ного механизма
Рис. 51. Схема простого криьошипно-шатун- ного механизма
|
Прн повороте коленчатого вала на 90°
Таблица 7
|
т. е. поршень проходит больше половины своего пути на величину —возрастающую с увеличением А; следовательно, при данном радиусе кривошипа путь поршня в первой четверти поворота коленчатого вала тем больше, чем короче шатун.
На практике часто пользуются графическим методом построения кривой перемещения поршня по способу Брнкса. Для этой цели проводит окружность радиуса RKfl (рис. 52). Из точки О,, смещенной относительно центра окружности на величину
| Величины Ак для определения перемещения поршня о* верхнем мертвой точки |
 Рис. 52. Графическое определение перемещения поршня
Рис. 52. Графическое определение перемещения поршня
|
jj-. отложенную в том же масштабе, что и RKf>, проводят луч О,Л, под утлом а,. Проекция точки А пересечения луча с окружностью на линию мертвых точек дает искомое положение поршни (точка В).
Для определения скорости поршня р ноimcm производную по времени от выражения хода поршня
= Л = i^W = R"n- (sin а" + Т sin 2а«)= ■ где = \!сек- угловая скорость вращения кривошипа.
Таблица 8
Величины Ди Д. 14 определении скорости поршни
|
В табл. 8 приведены значения коэффициента В, для различных положении кривошипа:
В, = sin а, + -£sin2a,.
Наибольшую скорость поршень имеет не прн угле поворота кривошипа, равном 90', а прн угле, несколько меньшем 90'. Средняя скорость поршня
25л Sn, = Ж = Ж м1са!
Максимальную скорость поршня современных мотоциклетных Двигателей можно определить из выражения
Ускорение поршни определяют по формуле
/» = (со» а, + X cos 2а.) = Н„<л1С,.
Для определения коэффициента С„ при различных значениях ак. и К пользуются таблицей (см. табл. 9).
Таблица 9
Величины Ся для определения ускорения поршня (С„ = cos<i„ -f- Xcos 2а,.)
|
Во всех приведенных формулах углы а* и перемещения поршня отсчитывают от в. м. т. Скорость и ускорение поршня положительны, если направлены к оси коленчатого вала.
Для определения максимального и минимального значений ускорения поршня надо производную от выражения /я приравнять нулю:
= — RKp<ol (sin а„ + 2л sin 2а J = 0.
откуда
sine, + 2Я. sin 2а, = sin ан + 4Я. sina„ со$аЛ. = = sin аж (1 + 4>. cos а,) = 0. Последнее выражение может быть верным нлн при sin =» 0. или если 1 -4- 4Хсо$ ик = 0. Если Х,< то второе уравнение не имеет решения, и ускорение будет иметь только два экстремальных значения при ак = 0 и ак — 180е, т. е. в верхней и нижней мертвых точках:
В случаях, когда >.> имеется cute одно экстремальное значение выражения — при а. ■= arccos ^ — ^}:
/«а, = (cos а. +1. cos 2п„) = [cos а, + А (2 cos"a, - I)] -
- -
Это ускорение — минимальное, т. е. наибольшее но абсолютной величине отрицательное значение ускорения поршня.
Для графического построения ускорений поршня по способу Толле (рис. 53) на горизонтальной оси откладывают отрезок А В,
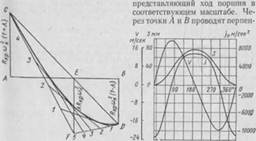 Рис. 53. Графическое определение ус- Рис. 54. Путь, скорость и ускор корсния поршня ние поршня двигателя К-750
(л - 4600 об/мим)
Рис. 53. Графическое определение ус- Рис. 54. Путь, скорость и ускор корсния поршня ние поршня двигателя К-750
(л - 4600 об/мим)
|
лнкуляры АС и BD, на которых откладывают ускорения, соответствующие ускорениям в нижней и верхней мертвых точках поршня: ЛС = /?„,*>; (1 + Х); BC = -RKP<o!(1-Х).
Точки С и D соединяют прямой линией. Из точки Е пересечения прямых А В и CD опускают перпендикуляр, на котором откладывают в том же масштабе, который был выбран для ускорений, отрезок EF \RKPi»x. Точку F соединяют прямыми линиями с точками С и D, затем делят отрезки CF и DF на равное число частей и соединяют соответствующие деления прямыми.
Общая касательная кривая к этим прямым соответствует ускорениям поршня.
На рис. 54 показаны кривые изменения пути, скорости и ускорения поршня в зависимости от угла поворота кривошипа, построенные с использованием таблиц.
§ 50. КИНЕМАТИКА СМЕЩЕННОГО КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА
У смешенного или дезаксналыюго кривошнпно-шатунного механизма плоскость прямолинейного движения поршневого пальца не в п.т пересекает ось коленчатого вала, а смещена

|
на некоторую величину а„ (рис. 55). Это происходит в случае смешения оси поршневого пальца с диаметральной плоскости шыиндра. Относительное смещение kH —
На двигателе ИЖ «Планета» ось цилиндра смещена с оси коленчатого вала на 5 «л; при радиусе кривошипа RKp = 42,5 мм
На двигателе мотоцикла MZ-I75 ось поршневого пальца смещена с диаметральной плоскости цилиндра на 1,5 мм. а величина к„ соответственно равна 0,016
Рис. 55. Схеме смещенного крнвошнппо-шатунного механизма
Смешенный кривошипно-шатунный механизм применяется с целью уменьшения бокового давления поршня. Для смешенного кривошннно-шатунного механизма: перемещение поршня
S = Rap [(1 - cos aj + -J- (I - cos 2a,) - k„\ sin ак ]; скорость поршня
v„ = RKP<oK (sin aK + sin 2aK - kn\ cos a*); ускорение поршни
U = Rep*0' (cos ««+ * cos 2cc* + sin aJ- Ввиду того, что добавочные члены k„\ sin а„ и knk cos ак практически малы, часто пренебрегают разницей в кинематике простого и смещенного кривошипных механизмов.
§ 51. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ ДВИЖУЩИХСЯ МАСС КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА И СИЛ ИНЕРЦИИ
Поршень движется возвратно-поступательно вдоль оси цилиндра вместе со связанными с ним деталями: компрессионными и масло- съемными кольцами, пальцем и стопорными кольцами. Масса всех этих деталей тя движется с ускорением ]„. 108
Шатун совершает сложное движение, прн котором малая головка движется с ускорением /„ вдоль осн цилиндра, а тело шатуна (стержень) вращается относительно осн малой головки.
Точное определение направления и величины сил инерции шатуна представляет значительную сложность, поэтому принято считать, что шатун имеет два самостоятельных движения (рис. 56):
— поступательное движение массы тш, = тш —вдоль
Lm
осн цилиндра:
— вращательное движение массы rnmi=mm f1 вокруг осн
Lm
кривошипа.
| тш |
| ш |
| г |
Прн предварительных расчетах двигателя предполагают, что
I
тш
Вращательное движение вокруг оси кривошипа совершают также детали подшипника большой головки шатуна: ролики, сепаратор или вкладыши тНя.
Таким образом, все детали кривошнпно-шатунного механизма можно рассматривать как две массы:
— Шу —масса частей, движущихся возвратно-поступательно вдоль цилиндра:
. I
ту«=тл -f- J тя\
— те — масса частей, вращающихся вокруг осн кривошипа:
тс у тш + т„ш.
В соответствии с распределением масс в кривошнпно-шатунном механизме действуют две силы инерции:
сила инерции возвратно-поступательно движущихся частей, направленная вдоль оси цилиндра,
Р, = — mjjn = — тjRKf,<o,< (cosaK -f >. cos 2aK);
центробежная сила, направленная no радиусу кривошипа, Ре — mcRK/ol.
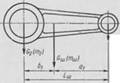
| Рис. 56. Схема определения приведенных масс шатуна |
При сложении положительными считают силы, направленные к оси коленчатого вала.
$ 5г. ДИНАМИКА ПРОСТОГО КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА
Па рис. 57 показаны силы, действующие на детали простого кривошипио-шатунного механизма одноцилиндрового двигатели. На внутреннюю поверхность камеры сжатии действует сила, направленная вверх:
Такая же по величине сила Р\ действует на поршень в обратном направлении — вниз (здесь pt — давление газов; значение силы известно из индикаторной диаграммы). ' На поршневой палец (рис. 57) дей- ±-------------------- а ствует алгебраическая сумма сил:
P* = Pi + P/,
где P't — сила давления газов на поршень;
Р/ — сила инерции возвратно-поступательно движущихся частей.
Силу Рх можно разложить на две составляющие: силу Ры, направленную вдоль оси шатуна, и силу N. перпендикулярную оси цилиндра. Сила
р." Аь
где Р* — угол наклона шатуна в данный момент.
Так называемая нормальная или боковая сила давления поршня на стенки цилиндра
Для определения tg pt прн различных значениях а, и). пользуются таблицей (см. табл. 10).
Перенеся силу Рш в центр кривошипного пальца и разложив ее по двум направлениям вдоль кривошипа и перпендикулярно ему. получим силу '/., называемую нормальной, и силу Т — касательную или тангенциальную.
Зависимость между силами Pm, Т и Z:
Z = P.cos(a, + p.); Т = РШ sin(a»+px);
подставляя значение Рш, получим
 Рис. 57. Схема сил, действующих в простом криио- шнпио-шатуниом механизме
Рис. 57. Схема сил, действующих в простом криио- шнпио-шатуниом механизме
|
7 = Р "»(». + М- j-_ И an (а, + р,) * ' стр., •
Т.1 б л и ц а 10
Величины V р, для различных значений?. и п*
|
СО» (a*-f М „.
Величины —rrjr Л-1" различных значении /. и а.
| X | ||||||||||
| а. | Знак | Зяак | ■4 | |||||||
| и | 1.) | 3jC | ■Jjf | "43 | u | |||||
| 1.000 | 1.000 | 1,000 | 1,000 | 1.000 | l.OOO | + | збо | |||
| 0.975 | 0,976 | ".977 | 0.977 | 0.978 | 4- | .150 | ||||
| ■20 | озоз | 0X107 | 02Ю9 | озю | 4- | |||||
| 0.787 | 0.792 | 0.796 | 0,806 | 4- | ||||||
| ода | 0,619 | 0,656 | 0.667 | 4- | ||||||
| 0.151 | 0/406 | 0.476 | 0.485 | 0,493 | 4- | |||||
| 1» | 0.297 | 0,Ю7 | 0,317 | 4- | :«« | |||||
| ОД.) | 0Л72 | 0,088 | 0.102 | 0.115 | 0.126 | 4- | ||||
| — | 0.145 | 0.124 | 0,106 | О.076 | ||||||
| 0,329 | 0,(08 | 0.289 | _ | |||||||
| — | 0,492 | 0.472 | 0,151 | 0.138 | 0.424 | 0,411 | ||||
| _ | 0,631 | 0.612 | 0,569 | 0,558 | _ | 2.50 | ||||
| 0.74.1 | 0.728 | 0.715 | 0,703 | 0,602 | 0.682 | |||||
| 0.810 | 0.792 | 0,785 | _ | |||||||
| 1 10 | 0,898 | 0383 ода; | _ | |||||||
| 0,945 | 0,910 | 0.932 | 0,926 | _ | ||||||
| 0.976 | 0.1172 | о,971 | 0,969 | 0,968 | _ | |||||
| 0.991 | 0,99.1 | |||||||||
| i.ooo | 1,I«0 | 1.000 | l.OOO | 1.000 | l.OOO | - | 18» |
В табл. II и 12 приводятся значения коэффициентов M|a'fM н "" " IV - для различных значений а, н X.
COS см р.
Сила инерции возвратно-поступательно движущихся частей передается картеру двигателя. То же самое можно сказать и о центробежной силе Pt.
Таблица 12
Величины М раммчиых лначгиий X и а,
«*Рж
|
\
Кроме этих двух сил опоры двигателя должны воспринимать и реактивный момент Mr, равный крутящему моменту двигателя М => TRKp. Силы Р, и Рс, действующие на опоры двигателя, могут быть частично или полностью уравновешены, реактивный же момент действует на опоры двигатели постоянно.
Средняя величина реактивного момента
.. 716.2Л', г Мн=>—кГ• м.
Реактивный момент действует в направлении, обратном вращению коленчатого вала.
Вернемся к формуле силы инерции возвратно-поступательно движущихся масс. Первый член этого выражения называют силой инерции первого порядка, второй — силой инерции второго порядка.
Существуют еще силы инерции четвертого, шестого и т. д. до п-го порядка.
Однако члены уравнения, стоящие после второго, малы и ими пренебрегают. Как видно из формулы, сила инерции первого порядка достигает наибольшего или наименьшего значения только один раз за один оборот коленчатого вала, т. е. периодом изменения силы инерции первого порядка является полный оборот коленчатого вала (360', или 2я рад).
Периодом изменения сил инерции второго порядка является пол-оборота коленчатого вала (180° или я рад).
Выявить силы н характер их изменения и является задачей динамического расчета двигателя.
§ 53. ДИНАМИЧЕСКИЙ РАСЧЕТ ДВИГАТЕЛЯ
Силы от давления газов на поршень определяют из индикаторной диаграммы, построенной на основании теплового расчета двигателя (см. выше). Однако не всегда такой расчет проводится. Обычно динамическим расчетом пользуются для двигателя, основные параметры которого Vn, е, N, и п,ц определены с достаточной точностью по сравнительным данным. В этом случае можно непосредствен но найти силы давления газов, действующие на поршень, построив индикаторную диаграмму.
Определение сил инерции возвратно-поступательно движущихся масс. Сила инерции возвратно-поступательно движущихся масс кривошипио-шатунного механизма
Р/= — m,jn кГ.
Обычно принято эту силу относить к 1 см* площади поршня. Это дает возможность сравнивать по динамической напряженности двигатели самых различных размеров и конструкций.
Сила инерции, отнесенная к единице площади поршня,
Р; = — RKPmj (cos а. + X cos 2а J ^ кГ/см
где — вес возвратно-поступательно движущихся частей кривошипио-шатунного механизма;
F„ — площадь поршня.
Прн определении ускорений /„ поршня для подсчета сил инерции лучше всего пользоваться таблицей, как указано выше. В этом случае диаграмму удельных сил инерции р, строят в зависимости от угла ак, причем интервалы между принятыми значениями ак должны быть не больше 20". Иногда используют графический метод для определения удельной силы ру, которую определяют в этом случае в зависимости от перемещения поршня, как это делалось при построении индикаторной диаграммы.
Графический метод определения сил инерции целесообразно применять прн числе цилиндров не более двух и равномерном чередовании вспышек.
Масштабы сил р, и перемещении выбирают такими же, как и для построении индикаторной диаграммы.
Силы газов на индикаторной диаграмме показаны как функции хода поршня. Если силы инерции определялись в зависимости от угла поворота кривошипа, то прежде чем приступить к их сложению, диаграмму сил газов следует построить в той же системе координат. Для этого необходимо отложить на оси V индикаторной диаграммы углы ак поворота кривошипа.
Давление, действующее на днище поршня, находят по формуле
Pi = P-P*.
где р — абсолютное давление на днище поршня в кПсм1 (из индикаторной диаграммы);
рк — давление в картере в кГ!см* (обычно принимают равным атмосферному).
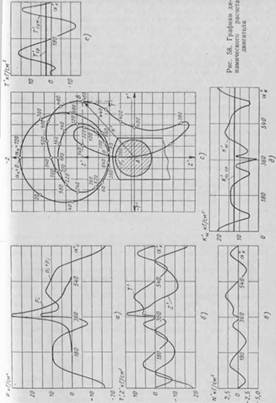
Полученные значения pt наносят на график (рис. 58). На эту же диаграмму наносят н кривую изменения удельной силы инерции возвратно-поступательно движущихся масс.
Прн сложении сила газов независимо от такта (сжатие и расширение) принимается положительной; соответственно с этим удельная сила инерции pj положительна прн направлении к оси коленчатого вала и отрицательна при обратном направлении. Складывать силы р{ и pj легче всего графически, пользуясь измерителем.
Касательные Т и нормальные 7. силы лучше определять аналитически. Эти силы также принято относить к 1 см- площади поршня. В этом случае их обозначают соответственно 7" и Z'.
Графики сил V, Z' (рис. 58) строят в том же масштабе, что и предыдущий график.
Силу N' определяют по формуле
N' = (p, + p;) tgp,.
Суммарная сила, действующая на шатунную шейку. Km = VT'* + (Z' -tPtf.
Пользуясь этой формулой, строят векторную диаграмму сил, действующих на шатунную шейку кривошипа (рис. 58, г), в следующем порядке. Откладывают вверх от точки А по вертикальной оси в масштабе, принятом для сил, центробежную силу
р'< = — rrtcRtpial у кГ/см*.
Через-полученную точку О проводят горизонтальную линию, на которой откладывают значения силы4?": вправо — положительные, влево — отрицательные. От конца вектора, изображающего силу 7", в вертикальном направлении откладывают отрезки, соответствующие силе Z' для того же угла поворота коленчатого вата: отрицательные значения вверх, положительные — вниз. Ог-
|
резок, соединяющий полученную точку В с точкой А, и является суммарной силой, действующей на шатунную шейку.
Определив точку В для всех принятых значений uk. и соединив их плавной кривой, получим векторную или полярную диаграмму СИЛ К'ш-
График сил К'ш (рис. 58,0) представляет собой развернутую векторную диаграмму. Для ее построения откладывают отрезки А В (рис. 58, г), соответствующие принятым углам поворота ак.
Эту диаграмму строят, не учитывая направлении действия силы К'ш' для расчета шатунного подшипника важно определить максимальное и среднее значения К'ш-
Если двигатель имеет два и более цилиндров, строят диаграмму суммарной касательной силы, являющейся алгебраической суммой действующих одновременно на коленчатый ват касательных сил Т' от всех цилиндров. Дли построения диаграммы (рис. 58, е) графически складывают отрезки, соответствующие касательным силам, отстоящим одна от другой на угол, равный углу между вспышками. Например, при суммировании касательных сил двухцилиндрового четырехтактного двигателя с рядным расположением цилиндров этот угол равен 360; для такого же двухтактного двигателя он равен 180°.
График суммарной касательной силы в масштабе есть кривая изменения крутящего момента двигателя за цикл. Из этого следует, что среднее значение TrpRKf)t]M соответствует среднему крутящему моменту двигателя w
Mtp = 716,2 ^ кГ м.
Графическое построение кривых можно рекомендовать только для учебной цели при динамическом расчете одно- и двухцилиндровых четырехтактных двигателей с равномерным чередованием рабочих ходов.
Интервал для углов поворота коленчатого вала ид1 — u,i принимают 10—20*; при необходимости иа отдельных участках вводят дополнительные промежуточные значения и,, например в момент максимального давления вспышки а, 370 при взятом интервале "»i. Можно рекомендовать для построения графиков следующие масштабы: дли сил в четырехтактных двигателях 1 мм соответствует 0,2—0,25 кГ/см '; для двухтактных 1 мм соответствует 0,1 кГ1см *; для углов поворота коленчатого вала 5 мм соответствует 10°.
§ S* РАВНОМЕРНОСТЬ ХОДА ДВИГАТЕЛЯ И РАСЧЕТ МАХОВИКОВ
Рассматривая график суммарных касательных сил (рис. 58, ё), который в другом масштабе является и графиком мгновенных крутящих моментов, можно заметить, что крутящий момент за цикл
Ив постоянно изменяется в зависимости от угла поворота коленчатого вала.
У одноцилиндрового четырехтактного двигателя за два оборота (720°) коленчатого вала крутящий момент одни раз достигает минимального значения (сжатие) и один раз — максимального (рабочий ход).
У двухцилиндрового четырехтактного двигателя за этот период такое изменение произойдет два раза, у четырехцнлиндрового четырехтактного четыре раза и т. д.
Полезная работа рабочего хода расходуется на увеличение угловой скорости шк маховика, который в последующие такты за счет своей инерции продолжает вращать коленчатый вал, теряя при этом полученное приращение угловой скорости.
Таким образом скорость коленчатого вала двигателя все время изменяется.
Чтобы определить величину и характер изменения угловой скорости to, вращения коленчатого вала, используем уравнение живой силы для вращательного движения:
ДМ(ак1 - аж (ttV.-u*,).
Работа избыточного момента ДМ на участке — а^, = Да вызывает изменение кинетической энергии маховика и связанных с ним подвижных деталей крнвошнпно-шатунного механизма:
■f (а>1, - со},),
где JM — момент инерции маховика и связанных с ним деталей крнвошнпно-шатунного механизма: Чс1 11 <0*а — мгновенные угловые скорости, соответствующие углам ии и поворота кривошипа.
Минимальные и максимальные значения угловой скорости и крутящего момента коленчатого вала не совпадают по углу поворота и по времени.
Преобразуя приведенные выше уравнения, получим
ДЛ1 (а*, - а,,) = if (ыж, - а>,,) (а>„, + co,t).
Подставляем в полученное выражение
Принимая, что /, и — время, соответствующее углам поворота а„ и коленчатого вала, и умножая числитель и знаменатель правой части на tt — tx, а также имея в виду, что
получим
Ml а.,-а.,
" 1,-1, ■
Угловое ускорение коленчатого в
Дата публикования: 2014-10-19; Прочитано: 680 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
