 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Условия равновесия
|
|
Статика - раздел теоретической механики, в котором изучаются способы эквивалентных преобразований систем сил, приложенных к твердому телу, а также условия равновесия твердых тел под действием приложенных к ним сил.
Условия равновесия свободного твердого тела под действием произвольной плоской системы сил могут быть записаны в виде трех независимых между собой уравнений равновесия

в которых оси проекций х и у, центр моментов Амогут быть выбраны совершенно произвольно в плоскости действия сил Fk (k =l, 2,... n).
В целях упрощения этих уравнений рекомендуется оси х и у выбирать так, чтобы они были перпендикулярны или параллельны большему количеству сил. а центр моментов принимать в точке, где пересекаются линии действия
неизвестных сил.
Существуют и две другие формы уравнений равновесия, получающиеся из первых путем замены уравнений проекций сил уравнениями их моментов:

(здесь ось х не должна быть перпендикулярной прямой АВ),

(точки А, В и С не должны находиться на одной прямой).
В последних выражениях и везде в дальнейшем индекс суммирования при знаке Ʃ опущен для сокращения записей.
Любое из этих уравнений, не использованное при определении неизвестных реакций, может служить для проверки правильности решения задачи.
Проекцией силы F на какую-либо ось называется алгебраическая величина, численно равная отрезку этой оси, заключенному между проекциями начала и конца силы (рис. 1).
Рекомендуется знак этой алгебраической величины определять путем сопоставления взаимного расположения вектора силы F и оси проекций, а ее модуль - из рассмотрения прямоугольного треугольника, одним из катетов которого является искомая проекция. Например, (рис. 1):
Fx =F cosα;
Fy = -F sinα.
Проекция силы на ось имеет размерность силы.
Если сила F не лежит в одной плоскости с осью проекций X (рис. 2), то для нахождения Fx пользуются правилом двойного проектирования: сначала проектируют силу F на любую плоскость П, содержащую ось X, затем проектируют полученный вектор F п на ось. Например, (рис. 2):
Fx = -F cosφ∙cos α.
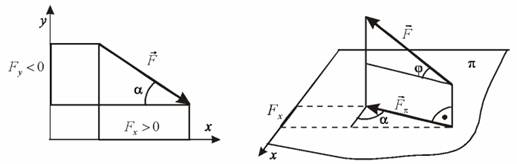
Рис. 1 Рис. 2
Алгебраическим моментом силыF относительно какого-либо центра О (обозначается m 0(F)) называется взятое со знаком (+) или (-) произведение модуля этой силы на плечо (т.с. кратчайшее расстояние от центра моментов до линии действия силы). В статике принято считать этот момент положительным, если сила стремится повернуть тело вокруг центра моментов против хода часовой стрелки. Например, (рис. 3):
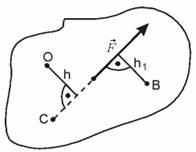
Рис. 3
m О(F)= F∙h; m В(F)= - F∙h 1; m С(F)=0.
Если определение плеча силы относительно данного центра вызывает трудности геометрического характера. Можно воспользоваться теоремой Вариньона о моменте равнодействующей силы, согласно которой алгебраический момент равнодействующей силы относительно любого центра равен алгебраической сумме моментов сил, составляющих систему, относительно того же центра. Например, (рис. 4): либо
m О(F)=- Fh, либо m О(F)= m О(F ') + m О (F ")= F '∙ (с - а) – F "∙ b.
Второй способ значительно проще, если заданы размеры а, b, с и вектор силы F.
Парой сил называется система двух равных антипараллельных сил, приложенных к телу (рис. 5). Действие пары сил на тело полностью определяется ее моментом.
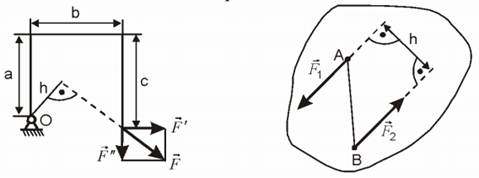
Рис. 4 Рис. 5
Алгебраическим моментом пары называется взятое со знаком (+) или (-) произведение одной из сил пары на плечо пары (т.е. на кратчайшее расстояние между линиями действия сил пары):
т = ± F 1 ∙ h = ± F 2∙ h.
Алгебраический момент пары, действующей против хода часовой стрелки, условно считается положительным, а по ходу часовой стрелки - отрицательным. На рис. 5:
т = + F 1∙ h = + F 2∙ h.
Момент пары не зависит от положения центра моментов, относительно которого он вычисляется. Поэтому пары на рисунках обозначают в виде круговых стрелок или в виде связанной системы равных, антипараллсльных сил без указания величин последних и плеча пары. Эти стрелки показывают
направление действия пары. Дополнительно указывается численное значение (модуль) их алгебраического момента.
Распределенными называются силы, приложенные к некоторой части объема или поверхности тела или к некоторой части линии. Они характеризуются интенсивностью, т.е. величиной силы, приходящейся на единицу объема, площади или длины.
Параллельные между собой распределенные силы одинакового направления имеют равнодействующую. Простейшие случаи замены распределенных сил равнодействующей силой показаны на рис. 6.
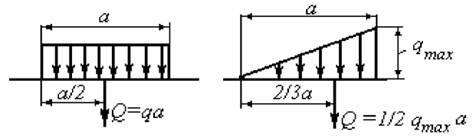
Рис. 6
При рассмотрении равновесия составной конструкции, состоящей из нескольких сочлененных между собой тел, необходимо обращать внимание на следующее. Силы взаимодействия между телами, входящими в систему, - внутренние силы. Они существуют попарно, подчиняясь принципу равенства действия и противодействия. Поэтому их не нужно включать в уравнения равновесия, составляемые для всей системы в целом. Когда рассматривается равновесие какой-нибудь части системы (какого-нибудь тела, входящего в систему), то остальная часть системы отбрасывается, а ее действие на оставшуюся часть заменяется силами реакций, приложенными в месте разъединения системы. Эти силы являются внешними по отношению к рассматриваемой части системы и должны учитываться при составлении уравнений равновесия наравне с другими внешними силами (заданными, а также неизвестными).
Другим примером сочлененной системы тел является жесткая конструкция, состоящая из стержней, соединенных друг с другом при помощи шарниров. Такая конструкция называется фермой. Условно считается, что стержни фермы прямолинейны и невесомы, а внешние нагрузки приложены к узлам (шарнирам) фермы. Это приводит к упрощению расчетов, т.к. такие стержни «работают» только на растяжение или сжатие. Причем усилия в стержнях фермы - это внутренние силы. Они исключаются из уравнений, когда рассматривается равновесие фермы в целом. Но эти же усилия становятся внешними по отношению к отдельным частям конструкции. В качестве таких объектов могут быть узлы фермы или ее части, получающиеся «сквозными сечениями» фермы по ее стержням. Соответствующие методы определения усилий в стержнях фермы получили названия «Метод вырезания узлов» и «Метод сквозных сечений». В первом случае рассматривается равновесие каждого узла фермы под действием приложенных к нему внешних сил (активных реакций опор) и внутренних (искомых или уже найденных) усилий в стержнях. Начинается решение с рассмотрения равновесия того узла фермы, где сходятся только два стержня. Затем переходят к рассмотрению равновесия следующего узла, в котором стержней с неизвестными усилиями не больше двух.
При использовании метода сквозных сечений ферма рассекается по тем стержням, усилия в которых требуется определить. Количество неизвестных усилий в этом случае не должно быть больше трех, а линии их действия не должны пересекаться в одной точке.
При расчете предполагается, что все стержни фермы растянуты, и усилия в них направляют «от узла».
Условия равновесия тела под действием произвольной пространственного системы сил записываются в виде уравнений:

Моментом силы относительно оси называется алгебраический момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью. Из определения следует, что силы, параллельные оси моментов или пересекающие ее, не создают момента относительно этой оси. Например, если сила расположена в плоскости, параллельной координатной плоскости Oxz и образует с плоскостью Оху -угол α, то (рис. 7).
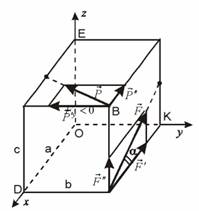
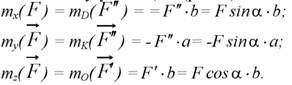
Рис. 7
Если сила Р лежит в плоскости, параллельной плоскости Оху, приложена в точке В (а, b, с) и имеет составляющие Р ' и Р ", параллельные осям Оу и Ох, справедливо (рис. 7):
т х(Р) = Р ' с; т у(Р) = - Р " с; т z(Р) = т Е(Р) = - Р ' а + Р " b.
Моменту силы относительно оси присваивается знак «+», если при виде с конца оси моментов действие момента силы направлено против хода часовой стрелки.
Дата публикования: 2014-10-19; Прочитано: 1154 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
