 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Работу выполнил студент гр.21206 Варшуков А.Г
|
|
Работу принял преподаватель Михалёв В. Р.
 |
Контрольная работа «Построение плана положений, определение скоростей и ускорений точек и звеньев механизма»
Дано:

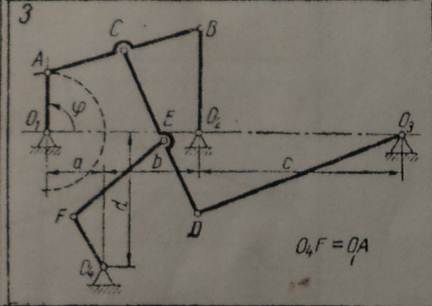
a = 15 см, b = 25 см, c = 54 см, d = 35 см, O1A = O4F = 15 см, O3D = 58 см, AB = 42 см,
BC = 21 см, CD = 26 см, O2B = 28 см, EF = 31 см.
1. Придерживаясь установленного порядка кинематического исследования механизма, выбираю масштаб
Здесь звено O1A=0,15 изображаю на плане положений отрезком  = 32 мм
= 32 мм
Ml =  , L - длина звена в (м), l - длина отрезка на плане положения в (мм), l - любое число. Ml = 0,005
, L - длина звена в (м), l - длина отрезка на плане положения в (мм), l - любое число. Ml = 0,005 
Используя зависимость  , определяю длины остальных звеньев механизма на плане положений
, определяю длины остальных звеньев механизма на плане положений
| L (м) | l (мм) | |
| a | 0,15 | |
| b | 0,25 | |
| c | 0,54 | |
| d | 0,35 | |
| O1A | 0,15 | |
| O3D | 0,58 | |
| O2B | 0,28 | |
| BC | 0,21 | |
| AB | 0,42 | |
| EF | 0,31 | |
| CE | 0,26 | |
| CD | 0,47 | |
| O4F | 0,15 |
В принятом масштабе по известным размерам получаю неподвижные точки. Отмечаю на плане траектории точек A, B, D, F – окружности соответствующих радиусов (O1A=32 мм, O2B=60 мм, O3D=123 мм, O4F=32 мм). За начальное (нулевое) положение механизма и всех его звеньев принимаю положение, при котором точки О1, А и В лежат на одной прямой. Отложу на плане дугу, радиусом (О1А+АВ)=121 мм. Точкой пересечения этой дуги и траектории точки В является В0. Провожу отрезок О1В0 и О2В0. Точкой пересечения отрезка О1В0 и дуги траектории точки А является точка А0. На отрезке О1В0 на расстоянии 45 мм от точки В0 отмечаю точку С0. Далее следует начертить дугу радиусом 100 мм и центром в точке С0. Точкой пересечения этой дуги с траекторией точки D является точка D0. На отрезке С0D0 на расстоянии 55 мм от точки С0 отмечаю точку Е0. Из точки Е0 чертится дуга окружности радиусом 66 мм. Точкой пересечения этой дуги и траектории точки F является точка F0. И, наконец, соединяю отрезком точки О4 и F0.
Разделив траекторию точки А на шесть равных частей, аналогичным методом нахожу остальные положения всех точек звеньев механизма.
2. Построение плана скоростей (привожу для четвёртого положения механизма).
2.1.Угловая скорость кривошипа О1А:

2.2. Скорость точки А кривошипа О1А:

2.3. Принимаю масштаб скоростей

Принимаю  мм
мм

Здесь  – отрезок на плане скоростей в мм, изображающий скорость точки А.
– отрезок на плане скоростей в мм, изображающий скорость точки А.
Вектор скорости точки А направлен перпендикулярно О1А в сторону  . Из произвольной точки Р4 плана скоростей откладываю этот вектор
. Из произвольной точки Р4 плана скоростей откладываю этот вектор

2.4. Точка В принадлежит кривошипу О2В и коромыслу АВ, поэтому для определения скорости точки В использую плоскопараллельное движение коромысла АВ и вращательное движение кривошипа О2В.
Плоское движение коромысла АВ

 - скорость точки В относительно точки А, этот вектор направлен перпендикулярно АВ в сторону
- скорость точки В относительно точки А, этот вектор направлен перпендикулярно АВ в сторону  .
.

- угловая скорость коромысла ВА, пока это неизвестная величина, то есть определить точное значение скорости пока не можем, но вектор направлен перпендикулярно АВ. На плане скоростей через точку «а» провожу линию, перпендикулярнуюА4В4. Так как точка В участвует во вращательном движении кривошипа О2В, то её скорость можно найти по формуле:

 - угловая скорость кривошипа О2В, пока это неизвестная величина, то есть определить точное значение скорости
- угловая скорость кривошипа О2В, пока это неизвестная величина, то есть определить точное значение скорости  пока не можем, но вектор
пока не можем, но вектор  направлен перпендикулярно О2В. На плане скоростей через точку Р4 провожу линию, перпендикулярную O2В4. Точка пересечения «b» определяет два вектора в масштабе скоростей:
направлен перпендикулярно О2В. На плане скоростей через точку Р4 провожу линию, перпендикулярную O2В4. Точка пересечения «b» определяет два вектора в масштабе скоростей:


Определяю действительные величины этих скоростей:


Определяю угловые скорости звеньев:


2.
2.1.
2.2.
2.3.
2.4.
2.5. Скорость точки С определяется из вращательного движения коромысла АВ по формуле

этот вектор направлен перпендикулярно А4С4, его длина на плане скоростей определяется отрезком
Из точки «а» откладываю отрезок «ас» (его направление совпадает с отрезком «аb»).
2.6. Скорость точки D. Точка D участвует в плоскопараллельном движении коромысла CD и вращательном движении кривошипа О3D.
Плоское движение коромысла CD

 - скорость точки D относительно точки С, этот вектор направлен перпендикулярно CD в сторону
- скорость точки D относительно точки С, этот вектор направлен перпендикулярно CD в сторону  .
.

- угловая скорость коромысла CD, пока это неизвестная величина, то есть определить точное значение скорости пока не можем, но вектор направлен перпендикулярно CD в сторону . На плане скоростей через точку «с» провожу линию, перпендикулярную C4D4. Так как точка D участвует во вращательном движении кривошипа О3D, то её скорость можно найти по формуле:

 - угловая скорость кривошипа О3D, пока это неизвестная величина, то есть определить точное значение скорости
- угловая скорость кривошипа О3D, пока это неизвестная величина, то есть определить точное значение скорости  пока не можем, но вектор
пока не можем, но вектор  направлен перпендикулярно О3D. На плане скоростей через точку Р4 провожу линию, перпендикулярную О3D4. Точка пересечения «d» определяет два вектора в масштабе скоростей:
направлен перпендикулярно О3D. На плане скоростей через точку Р4 провожу линию, перпендикулярную О3D4. Точка пересечения «d» определяет два вектора в масштабе скоростей:


Определяю действительные величины этих скоростей:


Определяю угловые скорости звеньев:


2.7. Скорость точки Е определяется из вращательного движения коромысла CD по формуле

этот вектор направлен перпендикулярно C4D4, его длина на плане скоростей определяется отрезком
Из точки «с» откладываю отрезок «ec» (его направление совпадает с отрезком «сd»).
2.8. Скорость точки F. Точка F участвует в плоскопараллельном движении шатуна EF и вращательном движении кривошипа О4F.
Плоское движение шатуна EF

 - скорость точки F относительно точки Е, этот вектор направлен перпендикулярно EF в сторону
- скорость точки F относительно точки Е, этот вектор направлен перпендикулярно EF в сторону  .
.

- угловая скорость шатуна EF, пока это неизвестная величина, то есть определить точное значение скорости  пока не можем, но вектор
пока не можем, но вектор  направлен перпендикулярно EF в сторону . На плане скоростей через точку «e» провожу линию, перпендикулярную Е4F4. Так как точка F участвует во вращательном движении кривошипа О4F, то её скорость можно найти по формуле:
направлен перпендикулярно EF в сторону . На плане скоростей через точку «e» провожу линию, перпендикулярную Е4F4. Так как точка F участвует во вращательном движении кривошипа О4F, то её скорость можно найти по формуле:

 - угловая скорость кривошипа О4F, пока это неизвестная величина, то есть определить точное значение скорости
- угловая скорость кривошипа О4F, пока это неизвестная величина, то есть определить точное значение скорости  пока не можем, но вектор
пока не можем, но вектор  направлен перпендикулярно О4F. На плане скоростей через точку P4 провожу линию, перпендикулярную О4F4. Точка пересечения «f» определяет два вектора в масштабе скоростей:
направлен перпендикулярно О4F. На плане скоростей через точку P4 провожу линию, перпендикулярную О4F4. Точка пересечения «f» определяет два вектора в масштабе скоростей:


Определяю действительные величины этих скоростей:


Определяю угловые скорости звеньев:


3. Построение плана ускорений (привожу для четвёртого положения механизма).
3.1.Определяю ускорение точки А. Эта точка принадлежит кривошипу О1А, который совершает вращательное движение вокруг неподвижной точки О1. Ускорение точки А можно определить по формуле

 – нормальное ускорение точки А, определяется по формуле
– нормальное ускорение точки А, определяется по формуле

Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки А4 к точке О1).
 – касательное ускорение точки А, определяется по формуле
– касательное ускорение точки А, определяется по формуле

 – угловое ускорение звена
– угловое ускорение звена  .
.
 , так как
, так как  , то
, то  и, следовательно,
и, следовательно,  .
.
Таким образом,  .
.
Назначаю план ускорений 
 – длина отрезка (мм), которым на плане ускорений изображаю ускорение точки А.
– длина отрезка (мм), которым на плане ускорений изображаю ускорение точки А.
Из произвольной точки  откладываю отрезок длиной 150 мм, параллельный О1А4, направленный от А4 к О1.
откладываю отрезок длиной 150 мм, параллельный О1А4, направленный от А4 к О1.

3.2. Определяю ускорение точки В. Эта точка принадлежит коромыслу АВ, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку А) можно записать:

 – нормальное ускорение точки В, относительно точки А.
– нормальное ускорение точки В, относительно точки А.

Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки В4 к точке А4).
На плане ускорений откладываю отрезок «1а», длиной 25 мм, параллельный В4А4

 – касательное ускорение точки В, определяется по формуле
– касательное ускорение точки В, определяется по формуле

 – угловое ускорение коромысла АВ, пока это неизвестная величина, то есть определить точное значение касательного ускорения
– угловое ускорение коромысла АВ, пока это неизвестная величина, то есть определить точное значение касательного ускорения  пока не можем, но вектор направлен перпендикулярно А4В4 в сторону . На плане ускорений через точку 1 провожу линию, перпендикулярную А4В4.
пока не можем, но вектор направлен перпендикулярно А4В4 в сторону . На плане ускорений через точку 1 провожу линию, перпендикулярную А4В4.
Кроме того, точка В принадлежит кривошипу О2В, который качается вокруг точки О2. Ускорение точки В можно определить по формуле:

 – нормальное ускорение точки В, определяется по формуле
– нормальное ускорение точки В, определяется по формуле

Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки В4 к точке О2). На плане ускорений из точки откладываю отрезок  длиной 26 мм, параллельный О2В4, направленный от В4 к О2.
длиной 26 мм, параллельный О2В4, направленный от В4 к О2.

 – касательное ускорение точки В, определяется по формуле
– касательное ускорение точки В, определяется по формуле

 – угловое ускорение кривошипа О2В. Пока это неизвестная величина, то есть определить точное значение касательного ускорения
– угловое ускорение кривошипа О2В. Пока это неизвестная величина, то есть определить точное значение касательного ускорения  пока не можем, но вектор направлен перпендикулярно О2В4. На плане ускорений через точку 2 провожу линию, перпендикулярную О2В4. Получаем точку «b», которая на плане ускорений определяет в масштабе 3 вектора:
пока не можем, но вектор направлен перпендикулярно О2В4. На плане ускорений через точку 2 провожу линию, перпендикулярную О2В4. Получаем точку «b», которая на плане ускорений определяет в масштабе 3 вектора:



Определяю действительные значения линейных ускорений:



Определяю угловое ускорение коромысла АВ и кривошипа О2В:


3.3.Определяю ускорение точки С. Эта точка принадлежит коромыслу АВ, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку А) можно записать:

 – нормальное ускорение точки С, относительно точки А.
– нормальное ускорение точки С, относительно точки А.
Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки С4 к точке А4)
На плане ускорений откладываю отрезок «3а», длиной 12 мм, параллельный С4А4
 – касательное ускорение точки С. Так как точка С лежит на середине коромысла АВ, то касательное ускорение точки С равно по величине половине касательного ускорения точки В относительно точки А.
– касательное ускорение точки С. Так как точка С лежит на середине коромысла АВ, то касательное ускорение точки С равно по величине половине касательного ускорения точки В относительно точки А.
На векторе «1b» откладываю вектор «14», равный 70 мм. Из точек 3 и 4 откладываю перпендикуляры, точкой пересечения которых является точка «с». Вектор  определяет в масштабе ускорение точки С:
определяет в масштабе ускорение точки С:

Действительное ускорение точки С:

3.4.Определяю ускорение точки D. Эта точка принадлежит кривошипу О3D, который качается вокруг точки О3. Ускорение точки D можно определить по формуле:

 – нормальное ускорение точки D относительно точки О3, определяется по формуле
– нормальное ускорение точки D относительно точки О3, определяется по формуле

Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки D к точке О3).
На плане ускорений из точки откладываю отрезок « » длиной 6 мм, параллельный О3D4, направленный от D4 к О3.
» длиной 6 мм, параллельный О3D4, направленный от D4 к О3.
 – касательное ускорение точки D относительно точки О3, определяется по формуле
– касательное ускорение точки D относительно точки О3, определяется по формуле

 – угловое ускорение кривошипа О3D. Пока это неизвестная величина, то есть определить точное значение касательного ускорения пока не можем, но вектор
– угловое ускорение кривошипа О3D. Пока это неизвестная величина, то есть определить точное значение касательного ускорения пока не можем, но вектор  направлен перпендикулярно О3D4. На плане скоростей через точку «5» провожу линию, перпендикулярную О3D4.
направлен перпендикулярно О3D4. На плане скоростей через точку «5» провожу линию, перпендикулярную О3D4.
Кроме того, точка D принадлежит коромыслу CD, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку C) можно записать:

 – нормальное ускорение точки D, относительно точки C
– нормальное ускорение точки D, относительно точки C

Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки D к точке C).
На плане ускорений откладываю отрезок «6c», длиной 27 мм, параллельный D4C4
 – касательное ускорение точки D относительно точки С, определяется по формуле
– касательное ускорение точки D относительно точки С, определяется по формуле

 – угловое ускорение коромысла CD, пока это неизвестная величина, то есть определить точное значение касательного ускорения
– угловое ускорение коромысла CD, пока это неизвестная величина, то есть определить точное значение касательного ускорения  пока не можем, но вектор
пока не можем, но вектор  направлен перпендикулярно D4С4. На плане ускорений через точку «6» провожу линию, перпендикулярную D4С4.
направлен перпендикулярно D4С4. На плане ускорений через точку «6» провожу линию, перпендикулярную D4С4.
Точкой пересечения перпендикуляров, проходящих через точки «5» и «6», является точка «d», которая определяет в масштабе 3 вектора.



Определяю действительные значения линейных ускорений:



Определяю угловое ускорение коромысла CD и кривошипа О3D:


3.
3.1.
3.2.
3.3.
3.4.
3.5. Определяю ускорение точки E. Эта точка принадлежит коромыслу CD, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку C) можно записать:

 – нормальное ускорение точки E, относительно точки C.
– нормальное ускорение точки E, относительно точки C.

Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки E к точке C).
На плане ускорений откладываю отрезок «7c», длиной 15 мм, параллельный D4C4
 – касательное ускорение точки E. Так как точка E лежит на коромысле CD, то касательное ускорение точки E согласно пропорции равно:
– касательное ускорение точки E. Так как точка E лежит на коромысле CD, то касательное ускорение точки E согласно пропорции равно:

На векторе «6d» откладываю вектор «86», равный 58 мм. Из точек «7» и «8» откладываю перпендикуляры, точкой пересечения которых является точка «e». Вектор  определяет в масштабе ускорение точки E:
определяет в масштабе ускорение точки E:

Действительное ускорение точки E:

3.6.Определяю ускорение точки F. Эта точка принадлежит кривошипу EF, который совершает плоскопараллельное движение. По теореме сложения ускорений (принимая за полюс точку E) можно записать:

 – нормальное ускорение точки F, относительно точки E.
– нормальное ускорение точки F, относительно точки E.

Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки F к точке E).

На плане ускорений откладываю отрезок «9e», длиной 23 мм, параллельный F4E4
 – касательное ускорение точки F, определяется по формуле
– касательное ускорение точки F, определяется по формуле

 – угловое ускорение коромысла EF, пока это неизвестная величина, то есть определить точное значение касательного ускорения пока не можем, но вектор
– угловое ускорение коромысла EF, пока это неизвестная величина, то есть определить точное значение касательного ускорения пока не можем, но вектор  направлен перпендикулярно E4F4. На плане скоростей через точку «9» провожу линию, перпендикулярную E4F4.
направлен перпендикулярно E4F4. На плане скоростей через точку «9» провожу линию, перпендикулярную E4F4.
Кроме того, точка F принадлежит кривошипу О4F, который качается вокруг точки О4. Ускорение точки F можно определить по формуле:

 – нормальное ускорение точки F, определяется по формуле
– нормальное ускорение точки F, определяется по формуле

Нормальное ускорение направлено от точки к центру вращения этой точки или полюсу вращения (в данном случае от точки F4 к точке О4).

На плане ускорений из точки откладываю отрезок  длиной 30 мм, параллельный О4F4, направленный от F4 к О4.
длиной 30 мм, параллельный О4F4, направленный от F4 к О4.
 – касательное ускорение точки F, определяется по формуле
– касательное ускорение точки F, определяется по формуле

 – угловое ускорение кривошипа О4F. Пока это неизвестная величина, то есть определить точное значение касательного ускорения пока не можем, но вектор
– угловое ускорение кривошипа О4F. Пока это неизвестная величина, то есть определить точное значение касательного ускорения пока не можем, но вектор  направлен перпендикулярно О4F4. На плане ускорений через точку «10» провожу линию, перпендикулярную О4F4. Получаем точку «f», которая на плане ускорений определяет в масштабе 3 вектора:
направлен перпендикулярно О4F4. На плане ускорений через точку «10» провожу линию, перпендикулярную О4F4. Получаем точку «f», которая на плане ускорений определяет в масштабе 3 вектора:



Определяю действительные значения линейных ускорений:



Определяю угловое ускорение коромысла EF и кривошипа О4F:


На этом анализ механизма для 4 положения закончен. Мы при помощи графо-аналитического метода определили скорости и ускорения всех точек механизма, угловые скорости и ускорения всех его звеньев.
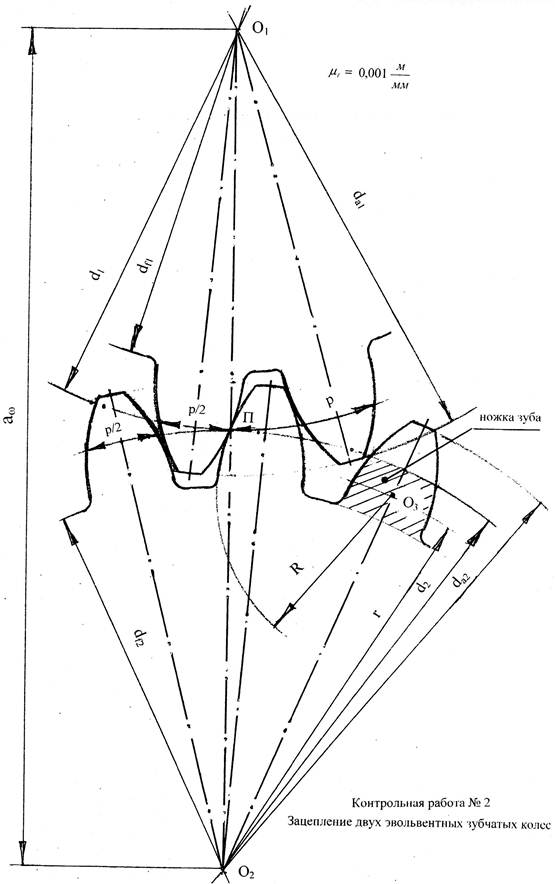
Контрольная работа «Зацепление двух эвольвентных зубчатых колес»
Рассчитать основные параметры зубчатой передачи и построить геометрическую картину эвольвентного зацепления двух зубчатых колес. Принять, что зубчатые колеса нарезаны
без смещения режущего инструмента, угол зацепления равен 20 градусов.
Вариант.
Дано:
- Число зубьев шестерни z1 = 19
- Число зубьев колеса z2 =21
- Модуль зацепления m =14мм
Межосевое расстояние α = m·(z1+z2)/2 = 14·(19+21)/2 = 280 мм
- Делительный диаметр шестерни d1 = m·z1 =14·19=266 мм
- Делительный диаметр колеса d2 = m·z2 =14·21=294 мм
- Диаметр выступа шестерни da1 = m·(z1+2) = 14 · (19+2) =14·(19+2) = 294 мм
- Диаметр выступа колеса da2 = m·(z2+2) = 14 · (21+2) = 14·(21+2) = 322 мм
- Диаметр впадин шестерни df1 = m·(z1-2,5) = 14· (19 - 2,5) = 231 мм
- Диаметр впадин колеса df2= m·(z2-2,5) = 14· (21 - 2,5) = 259 мм
- Шаг зацепления p = П·m = 43.96 мм
На формате А4 в масштабе 1:1 или μl =  = 0,001
= 0,001  намечаю линию центров О1О2=266 мм. Из точки О2 провожу три окружности, диаметры которых соответственно d2, da2, df2. Получаю будущую точку зацепления П - точка пересечения окружности диаметром d2 и линии центров О1О2. От точки П по дуге делительной окружности (её диаметр d2) выполняю вправо три засечки циркулем размером p/2, а влево от точки П –две засечки размером p/2. Первый размер p/2 правее точки П делю пополам и через середину провожу будущую осевую первого зуба колеса. Аналогично поступаю с третьим размером p/2 (правее точки П) и провожу осевую
намечаю линию центров О1О2=266 мм. Из точки О2 провожу три окружности, диаметры которых соответственно d2, da2, df2. Получаю будущую точку зацепления П - точка пересечения окружности диаметром d2 и линии центров О1О2. От точки П по дуге делительной окружности (её диаметр d2) выполняю вправо три засечки циркулем размером p/2, а влево от точки П –две засечки размером p/2. Первый размер p/2 правее точки П делю пополам и через середину провожу будущую осевую первого зуба колеса. Аналогично поступаю с третьим размером p/2 (правее точки П) и провожу осевую
второго зуба колеса. Второй размер p/2 левее точки П также делю пополам и провожу осевую третьего зуба колеса.
Эвольвенту окружности заменяю дугой окружности, радиус которой R определяю следующим способом: ножку зуба колеса делю на две равные части и через эту середину из центра О2 провожу вспомогательную окружность радиусом r, получаю точку О3.Размер О3П и есть искомый радиус П. Провожу этим радиусом на трех дугах окружностей d2,da2,df2 профили трех зубьев колеса. Скругления на ножках зубьев выполняю произвольным радиусом,но не более 5 мм. Из центра О1 провожу три окружности, диаметры которых d1, da1, df1. По дуге делительной окружности(диаметр d1) выполняю вправо от точки П две засечки размером p/2, а влево от точки П - одну засечку размером p/2.Второй размер p/2 справа от точки П и левый размер p/2 делю пополам и из центра О1 провожу две осевые будущих зубьев шестерни. Профили зубьев очерчиваю аналогично профилям зубьев колеса, проведя через середину ножки зуба шестерни вспомогательную окружность радиуса r.
Дата публикования: 2014-10-19; Прочитано: 512 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
