 |
Главная Случайная страница Контакты | Мы поможем в написании вашей работы! | |
Использование нечеткой логики и нечетких чисел в решении задач управления проектами
|
|
Современный уровень развития промышленности требует комплексного подхода при разработке САУ техническими объектами. Это обусловлено, с одной стороны, необходимостью повышения качества управления при минимальных затратах на создание и эксплуатацию систем, с другой стороны – усложнением структуры объекта управления, функций, выполняемых им, и, как следствие, увеличением факторов неопределённости, которые необходимо учитывать для управления объектом.
В теории автоматического управления существует достаточно много методов, позволяющих оптимизировать работу систем по тем или иным критериям качества при выполнении ряда ограничений.
Математический аппарат, используемый в традиционных методах автоматического управления, не всегда в полной мере может удовлетворить нуждам современного производства. Поэтому в последнее время находят широкое распространение так называемые “мягкие вычисления”, основной принцип которых заключается в обеспечении приемлемого (не обязательно оптимального) качества управления в условиях неопределённости при относительно невысоком уровне затрачиваемых ресурсов (стоимостных, временных, вычислительных и т. п.). К мягким вычислениям в настоящее время относят такие информационные технологии, как экспертные системы, нейронные сети, нечеткие системы, генетические алгоритмы и ряд других. В их основе лежит попытка некоторой формализации деятельности головного мозга человека и функционирования живых организмов.
Рассмотрим ряд аспектов использования нечеткой логики при управлении ТО (техническими объектами). Построение нечетких систем основано на имитации действия человека-оператора или ЛПР при помощи ЭВМ. Действительно, человеку свойственно оперировать не количественными показателями, а качественными, но следует учитывать, что эти качественные понятия носят, по сути, нечёткий характер. При этом используются лингвистические переменные, описывающие входную ситуацию и управляющие воздействия на качественном уровне. Эти лингвистические переменные задаются на некоторой количественной шкале, при помощи которой определяются степени соответствия данных рассматриваемым понятиям. Для этого используются функции принадлежности, принимающие значения от 0 до 1. Возможные значения лингвистических переменных называются термами (например, для лингвистической переменной – «Уровень пульпы» термами являются «Понизить», «Повысить», «Не изменять»). Кроме того, задается набор правил, ставящих в соответствие входной ситуации определённое управляющее воздействие. Эти правила обычно имеют вид «Если …, то…» и формируются при помощи эксперта или группы экспертов. Однако во многих случаях экспертам не удаётся принять однозначное решение о требуемом воздействии на объект при сложившейся ситуации. Например, если рассогласование между уставкой и выходом объекта отрицательно, а его производная положительна, даже опытному специалисту бывает затруднительно ответить, каким должно быть управляющее воздействие. Поэтому представляется целесообразным каждому правилу «Если …, то…» также ставить в соответствие некоторую величину из интервала от 0 до 1, отражающую степень уверенности в предпринимаемых действиях. Таким образом, формируется нечеткое соответствие между пространством предпосылок и пространством заключений [2].
После описанных процедур, выполняемых экспертами, вступает в действие механизм нечеткого логического вывода, в ходе которого осуществляется композиция нечеткого множества [3]. Композицию можно представить как аналог умножения вектор-строки на матрицу, только вместо операции умножения используется расширенное представление логической операции И, а вместо операции сложения – расширенное ИЛИ. В результате определяется нечёткое множество управляющих воздействий. Последним этапом алгоритма нечеткого управления является дефаззификация (от англ. слова «Fuzzy» – «нечеткий») – процесс перевода нечетких данных в конкретные физические управляющие величины.
Обычно в качестве расширений операций И и ИЛИ выбирают операции взятия минимума и максимума соответственно, т.е. используют максминный логический базис. Однако существуют и другие точки зрения относительно выбора логического базиса. Вообще тот или иной логический базис задается априори. Наиболее распространенными являются максминный, алгебраический и ограниченный базисы.
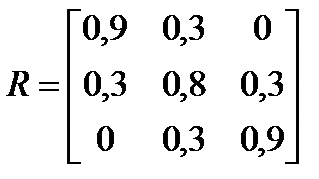
Как было сказано выше, нечёткое соответствие отражает степень уверенности ЛПР, выполняющего данное действие в сложившейся ситуации. График нечеткого соответствия может быть представлен в виде матрицы. Так, например, если входная Х и выходная Y переменные имеют одинаковые терм-множества Тх = Ту ={«Отрицательно», «Около нуля», «Положительно»}, а график нечеткого соответствия имеет вид:
 ,
,
то система правил нечеткого вывода имеет следующий вид:
- если Х «Отрицательно», то Y – «Отрицательно» со степенью уверенности 0,9, «Около нуля» - со степенью уверенности 0,3;
- если Х «Около нуля», то Y «Отрицательно» со степенью уверенности 0,3, «Около нуля» со степенью уверенности 0,8, «Положительно» со степенью уверенности 0,3;
- если Х «Положительно», то Y «Около нуля» со степенью уверенности 0,3, «Положительно» со степенью уверенности 0,9.
Фактически механизм нечеткого логического вывода представляет некоторое нелинейное преобразование.
В качестве иллюстрации различий в статических характеристиках нечеткого регулятора при выборе различных логических базисов для одномерного случая рассмотрим зависимости, изображенные на рисунках 1…3 приложения А. График нечеткого соответствия имеет вид
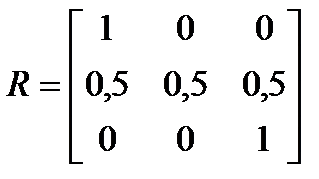
Такой график нечеткого соответствия означает, что эксперт, чьи знания были использованы при построении НР, мог выразить свою мысль следующим образом: «Я уверен, что, если Х положительно, то Y должно быть положительно и, если Х отрицательно, то Y должно быть отрицательно, но если Х близко к нулю, то Y может быть как близким к нулю, так и отрицательным, так и положительным – наверно, это зависит от дополнительных неучтенных условий (например, от производной Х по времени)».
Приведенные примеры достаточно наглядно демонстрируют различия свойств НР при выборе того или иного логического базиса.
Так, например, алгебраический базис обеспечивает более линейную статическую характеристику. С одной стороны, это свойство является положительным, поскольку разработчику систем управления всегда удобней иметь дело с линейными характеристиками. С другой стороны, линейную зависимость легко реализовать, не прибегая к нечёткой логике. Иными словами, если разработчик системы управления считает, что зависимость между входом и выходом системы должна быть близка к линейной и настаивает на том, что система должна строится на основе теории нечетких множеств, то можно порекомендовать ему использовать именно алгебраический базис.
Максминный базис генерирует характеристику, которую можно аппроксимировать типовой нелинейностью «зона нечувствительности + насыщение». Подобная характеристика является достаточно надежной, поскольку «насыщение» не дает системе идти в разнос, ограничивая неустойчивый режим автоколебаниями, а «нечувствительность» стабилизирует систему в режиме, близком к установившемуся. Такой вид характеристики в полной мере удовлетворяет концепции мягких вычислений.
Наиболее интересным является ограниченный базис, поскольку изменение графика нечеткого соответствия в этом случае может качественно повлиять на характеристики системы. Наглядным примером тому служит зависимость, изображённая на рис. 3. Как видно из этого рисунка, статическая характеристика имеет два участка, где коэффициент передачи отрицателен, т. е. при попадании на эти участки система теряет устойчивость (несмотря на то, что все промежуточные операции на первый взгляд кажутся монотонными). Как показал анализ эта немонотонность обусловлена способом дефаззификации.
Таким образом, целесообразно при построении нечётких систем управления пользоваться не только знаниями эксперта, но также базовыми понятиями теории автоматического управления.
Дать общие рекомендации относительно выбора того или иного базиса не представляется возможным – все зависит от специфики управляемого объекта.
Анализ работы нечетких САУ позволил выявить следующие основные факторы, влияющие на качество управления:
- количество термов входных и выходных переменных;
- вид функций принадлежности нечетких переменных, составляющих терм-множества лингвистических переменных;
- характер нечеткого соответствия между пространством предпосылок и пространством заключений;
- способ дефаззификации;
- выбор логического базиса.
Следует заметить, что во многих публикациях на основании ограниченных экспериментальных данных делается вывод о том, что нечеткие алгоритмы обеспечивают более высокую эффективность по сравнению с классическими. Это далеко не всегда справедливо. В каждом конкретном случае необходимо сопоставлять требуемое качество управления с располагаемыми ресурсами. Появление теории нечетких множеств и алгоритмов управления на её основе обусловлено, в первую очередь, появлением задач, для решения которых традиционного математического аппарата просто не существует.
Эффективность использования мягких вычислений весьма высока. Об этом можно судить по многочисленным публикациям, посвященным данной теме. Однако эта эффективность заметно возрастает, если наряду с мягкими вычислениями применять традиционные методы теории автоматического управления, опробованные в течение десятилетий и имеющие под собой достаточно жесткую математическую основу.
Дата публикования: 2014-10-19; Прочитано: 1339 | Нарушение авторского права страницы | Мы поможем в написании вашей работы!
